



- 收藏
- 加入书签

基于开放道路自动驾驶示范区的V2X场景测试
 打开文本图片集
打开文本图片集
摘 要:武汉经开区开放道路自动驾驶示范区主体工程二期项目已完成智能基础设施和智能网联操作系统平台建设。基于已建成的智能基础设施和智能网联操作系统平台,按照《合作式智能运输系统-车用通信系统应用层及应用数据交互标准》,开展全面的V2X场景测试,对车载终端的V2X功能进行验证,对示范区“车-路-云”一体化测试环境进行验证,对场景端到端的时延测试。本文主要涉及其中的前向碰撞预警(FCW)场景,测试结论显示,当前V2X应用效果均已达标。
关键词:车路协同(V2X);开放道路;自动驾驶;应用场景;测试。
1 概述
目前武汉智能网联示范区已完成一期28.5公里开放道路的建设及示范应用,二期覆盖武汉市经济开发区全域的77.56公里的开放道路也于2020年底完成智能化改造及建设,未来项目范围将拓展到整个武汉市,实现真正城市级智能网联示范应用。
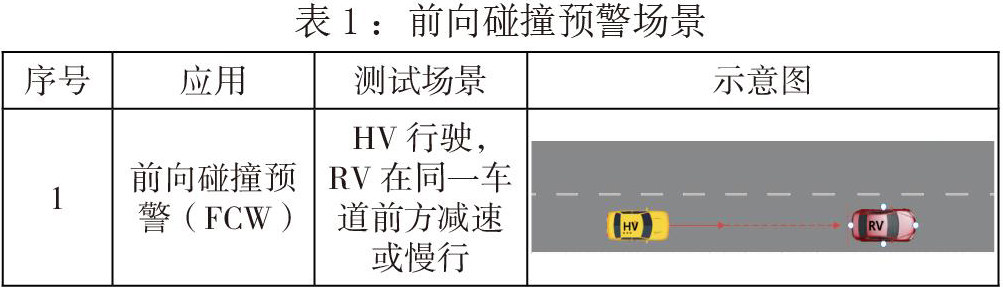
在汽车的智能驾驶或自动驾驶中,V2X具有众多应用场景,常用的应用16类应用场景包括前向碰撞预警(FCW)、交叉路口碰撞预警(ICW)、左转辅助(LTA)、盲区预警/变道预警(BSW/LCW)、逆向超车预警(逆向超车预警)(DNPW)、紧急制动预警(EBW)、异常车辆提醒(AVW)、车辆失控预警(CLW)、道路危险状况提示(HLW)、限速预警(SLW)、闯红灯预警(RVLW)、弱势交通参与者碰撞预警(WRUCW)、绿波车速引导(GLOSA)、车内标牌(IVS)、前方拥堵提醒(TJW)、紧急车辆提醒(EVW)等。依托武汉经开区开放道路自动驾驶示范区,本文对车路协同(V2X)的前向碰撞预警场景进行了测试,相应的场景描述如表1所示。
2 基于武汉经开区自动驾驶示范区的前向碰撞预警测试
2.1 测试依据
此次测试的主要依据如下:
(1)T/CSAE 53-2017 合作式智能运输系统-车用通信系统应用层及应用数据交互标准(Cooperative intelligent transportation system;vehicular communication;application layer specification and data exchange standard);
(2)SAEJ 2735 专用程通信息集字典(DedicateSho Range Commnications(DSRC)Message Set Dictionary);
(3)SAEJ 2945/1V2V 车载安全通信系统性能需求(On-BoardSystemRequirements for V2V Safety Communications);
(4)ETSITS 102637 智能交通系统车辆通信系统基本用集(Intelligen Transportation Systems(ITS):Vehicular Communications: Basic Set of Applications);
(5)GB 5768-2009 道路交通标志与标线 GB25280-2016 道路交通信号控制机;
(6)GB/T 16262.1-2006 信息技术 抽象语法记法一(ASN.1)第1部分:基本记法规范;
(7)GB/T 16262.2-2006 信息技术抽象语法记法一(ASN.1)第2部分:信息客体规范;
(8)GB/T 16262.3-2006 信息技术 抽象语法记法一(ASN.1)第3部分:约束规范;
(9)GB/T 16262.4-2006 信息技术抽象语法记法一(ASN1)第4部分:ASN.1规范的参数化;
(10)GB/T 16263.2-2006 信息技术 ASN.1编码规则 第2部分:紧缩编码规则(PER)规范。
2.2 前向碰撞预警
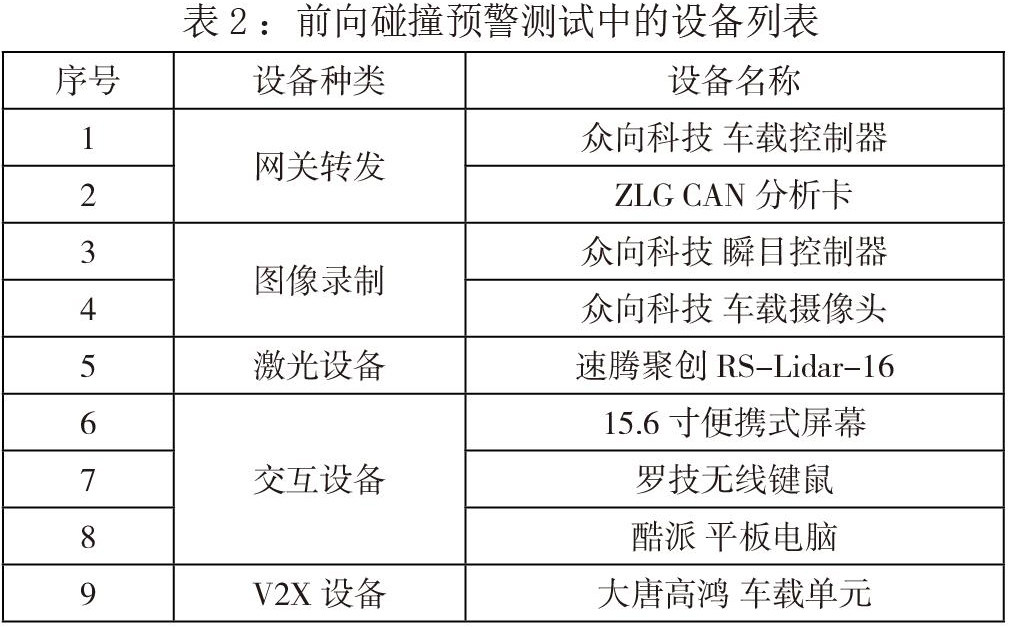
在此次测试中,主要测试设备如表2所示。
前向碰撞预警的测试场景是指,测试道路选择长直道,远车停在主车同一车道正前方,主车以30km/h的速度从300m外接近远车。当本车与远车存在追尾碰撞风险时,前向碰撞预警功能通过车载显示屏对主车驾驶员进行预警,前向碰撞预警算法流程示意图如图1所示。
前向碰撞预警场景中,算法输入为:(1)本车位置信息;(2)本车速度;(3)远车位置信息;(4)远车速度。算法输出为:前向碰撞预警或不预警。
前向碰撞预警场景的算法执行流程如下:(1)输入:本车信息,他车信息;(2)判断主车车道上前方是否有其他车辆,是则执行下一步,否则不执行前向碰撞预警;(3)判断前车是否存在碰撞危险,是则执行下一步,否则不执行前向碰撞预警;(4)执行前向碰撞预警。
2.3 测试结论
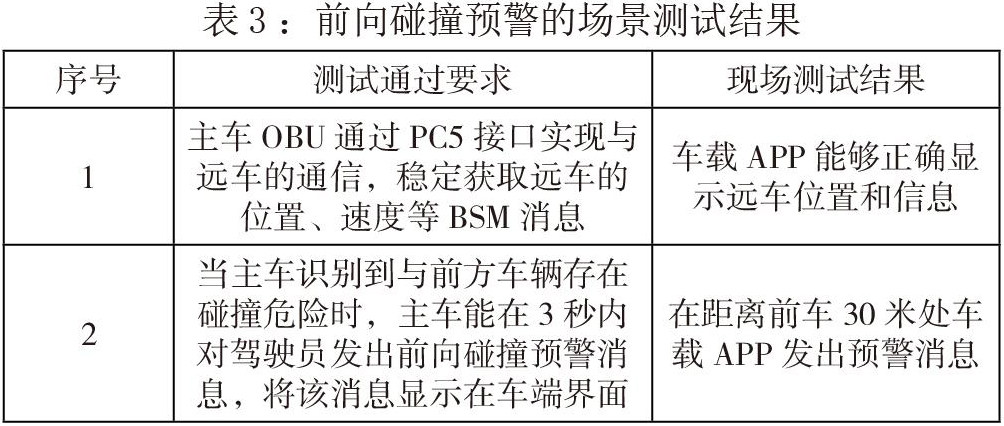
依托武汉经开区的自动驾驶示范区项目,测试结论如表3所示,测试结果显示,该应用在前向碰撞场景中正常发挥其预警作用,达到测试标准,测试通过。
3 结束语
车路协同V2X是指车载单元与其他设备通讯,包括但不限于车载单元之间通讯(V2V),车载单元与路侧单元通讯(V2I),车载单元与行人设备通讯(V2P),车载单元与网络之间通讯(V2N)。本文主要针对V2X的应用场景展开研究与测试,对前向碰撞预警的应用场景进行了分享与测试,测试结果显示,当前部署的V2X功能,均满足要求。后期,将从两个方面开展工作。一方面,依托武汉经开区自动驾驶示范区,开发更多的V2X应用场景,并对应用场景进行测试验证,将武汉经开区自动驾驶示范区打造成一个一流的权威的测试场所。另一方面,对已完成测试的应用场景,在其他示范区或项目中进行推广与应用,巩固测试效果,实现现有成果的价值最大化。
参考文献
[1]刘玮; 张翼鹏; 关旭迎; 匡尚超; 李凤. C-V2X车联网城市级规模示范应用[J]. 电信科学. 2020(04).
[2]丁绪涛; 吉鹏; 王德远. 武汉经开区智能汽车驾驶示范区经营模式探讨[J]. 信息通信. 2019(12).

 京公网安备 11011302003690号
京公网安备 11011302003690号


