



- 收藏
- 加入书签

基于路径规划下移动机器人动态避障的研究
 打开文本图片集
打开文本图片集

摘要:移动机器人要想到达某个特定的目标地点,不光是有导航定位就可以完成的,在从起点到达目标地点的时候,需要有一个规划好的路径才可以更有效率的到达,一个好的路径规划可以有效的减少移动机器人在向目标地点移动时的资源消耗,并使机器人能在够安全、快速、平滑的到达目的地。因此,考虑到移动机器人周围环境的不确定性,在出现一定变化时就需要机器人根据相应的环境情况做出调整。本文采用DWA算法作为移动机器人的路径规划算法,该算法可以支持移动机器人实时动态避障,并能实时根据地图环境调整其运动轨迹。
关键词:移动机器人;路劲规划;DWA算法;动态避障
1、研究背景
在移动机器人的自主探索中需要对其进行路径规划,路径规划技术作为移动机器人自主导航的最基本环节之一,是目前很多技术领域研究的热点,具有非常广阔的应用前景和科研价值,而路径规划算法则是其中最核心的研究内容。路径规划的主要任务是从一个初始点出发.然后按照特定的问题需求.寻找到一系列的动作在保证无碰撞、安全的情况下到达任务的目标点为止。本文以四轮差速移动机器人为例,探索路径规划中DWA算法对移动机器人路径规划的影响。
2、局部路径规划——DWA算法研究
而在实际导航过程中,机器人可能无法按照给定的全局最优路线运行,比如:机器人在运行中,可能会随时出现一定的障碍物。局部路径规划的作用就是使用一定算法来实现障碍物的规避,并选取当前最优路径以尽量符合全局最优路径。本文采用DWA算法作为局部路径规划算法。
局部路径规划相当于把总的路径分为很多小路径然后依次达成,这样做的好处是在进行全局路径规划时对地图保存过的障碍物进行避障,而在局部路径规划时会对新增加的障碍物信息也进行避障,并且局部路径规划算法支持对动态障碍物进行避障,全局路径规划和局部路径规划相互配合,一起完成导航功能。
3、局部路径规划算法的集成验证
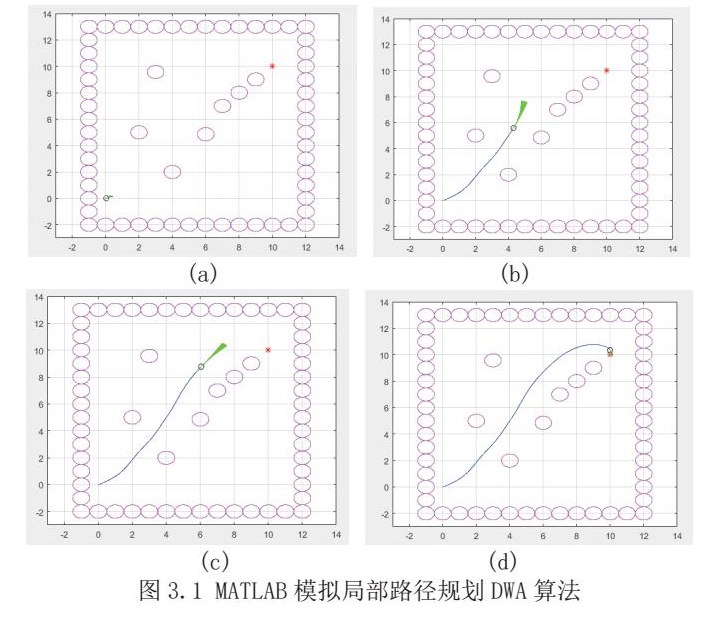
本文利用MATLAB对移动机器人局部路径规划DWA算法做出假设,假设移动机器人从起始位置向目标地点移动,在机器人移动路程中有障碍物,当机器人遇到障碍物会实时进行动态避障,具体实现过程如图3.1所示:
如图3.1所示,红色圆圈为障碍物,红色*为目标地点,(a)为机器人出发位置,(b)(c)两图为机器人运动中实时动态避障过程,其中绿色为模拟的路径,根据小车当前的速度,计算出其所采样的范围,然后对所采样的每一组速度依据运动模型模拟一段时间内的路径,根据评价函数对每一条路径都打分,在最后选取得分最高的路径进行,则该组路径对应一组速度,而这组速度作为其下一时刻的速度,则机器人以新的速度进行前进,如此循环,机器人不断调整自身的速度和方向,向目标点行驶,从而实现导航的功能。
本次实验是使用A*算法结合DWA算法进行验证分析。针对不同情况下的机器人在移动过程中自主避障的情况,本文对此做出了相应的实验验证分析。首先是静态环境下的移动机器人的自主导航实验,该实验主要是针对机器人在全局路径下无其他移动障碍物的路径进行实验验证;二针对动态障碍物的移动路径下的自主避障进行分析验证。对于这两种情况的实验验证是为了模拟实际环境下的移动机器人的导航实验。具体情况如下分析:
(1)静态环境下移动机器人的导航实验
建立静态栅格地图环境,开启ROS机器人和导航系统,在Rviz中设置目标点,观察移动机器人的路径效果。在Rviz中观察到的局部地图如图3.2所示:
本实验设定的路径效果评价指标主要有两个,分别为移动机器人的快速性和准确性。快速性指标体现在移动机器人到达目标地点的时间长短;而准确性则体现在移动机器人在到达目标地点位置的准确程度,即距离目标点的偏差程度。
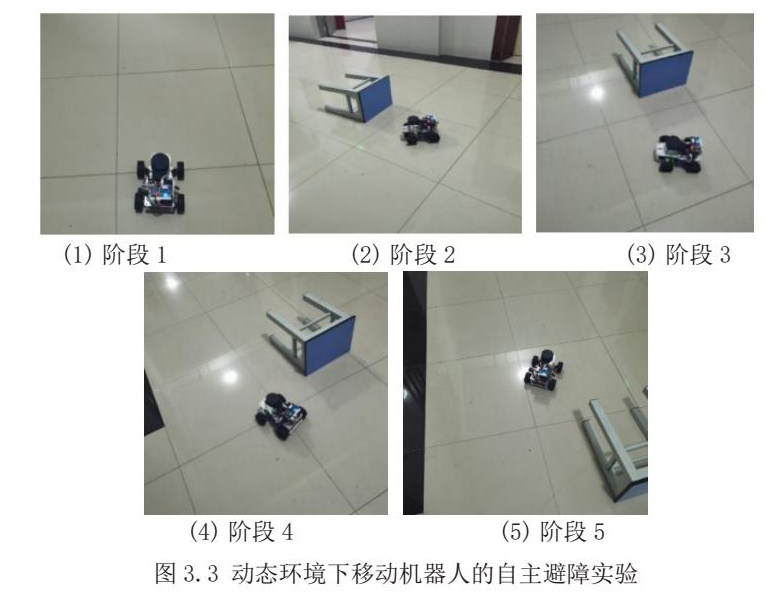
(2)动态环境下移动机器人的自主避障实验
在真实的环境下,有一些障碍物会移动,因此这就会影响移动机器人的判断能力。但是从另一个方面来说,这也是评价了移动机器人的性能指标的好坏,即在移动过程中的稳定性。因此,本实验在静态环境的基础下,将实验室的物品进行位置变换,以此来判断移动机器人的对实际环境的准确判断性。本次实验是在静态环境下临时增加两个障碍物,从而设置动态实验环境。如图3.3所示:
4、总结
本文主要是对DWA算法进行仿真测试和现场测试实验,完成场景环境的地图构建、定位以及导航等工作,并验证算法的理论内容。在机器人移动过程中,机器人会自主对障碍物进行躲避,并且在遇到新的障碍物时会重新规划路径。通过仿真与现场实验测试结果可知,移动机器人能准确到达指定位置,且功能可靠齐全。
参考文献
[1]王醒策,张汝波,顾国昌.基于势场栅格法的机器人全局路径规划[J].哈尔滨工程大学学报,2003(02):170-174.
[2]何娟,涂中英;牛玉刚.一种遗传蚁群算法的机器人路径规划方法[J].计算机仿真,2010(03):180-184.
[3]周瑜,张金聪,曾诗研.基于改进A~*算法的行车自动路径规划[J].冶金自动化,2022(S1):297-302.
作者简介:
1.陆瀚元,南华大学电气工程学院,研究方向:智能控制。
2.杨伟霖,仲恺农业工程学院信息科学与技术学院,研究方向:数据科学与大数据技术。
3.黄婉琳,北京理工大学珠海学院会计与金融学院,研究方向:金融工程。
4.陆美杉,三亚市第一中学。

 京公网安备 11011302003690号
京公网安备 11011302003690号


