



- 收藏
- 加入书签

基于双目立体视觉+IMU架构的喷漆粉刷机在墙体装修的应用
 打开文本图片集
打开文本图片集
摘要:本文提出了一个基于双目立体视觉和IMU架构的自动喷涂机器人,用于室内外墙体粉刷的装修工程。本机器人能实现机械与控制的完美结合,采取喷漆为主、刷漆为辅的工作理念,具备喷涂效率高、作业时间长的特点。其独有的视觉识别框架可以帮助机器人适应不同的喷涂方案,提升喷涂效率,拥有扎实的技术基础和广大的应用场景。
关键词:装修机器人;双目立体视觉;立体匹配;视觉IMU架构
引言:
目前国内房地产市场正在不断升温,室内装修的安全性、高效性越来越受到人们的重视。我国建筑业的各种工程特别是一般民用建筑需要粉刷墙壁,在民用、商业等方面的建筑,从墙面到水电安装,全部是由人工来完成,作业效率低且存在安全问题。基于双目立体视觉和IMU结构的自动喷涂机器人可以实现机械与控制的完美结合,能简化装修工程、减轻人工压力、提高粉刷效率。
1 产品行业及市场前景
1.1 行业分析
自20世纪90年代喷涂机器人代替喷涂机械引入汽车行业,喷涂机器人技术的应用迅速发展,中国已是世界上最大的工业机器人应用市场。目前喷涂机器人大多运用于汽车行业,在装修墙体方面的运用尚在起步时期。为解决高层建筑外墙涂料的自动喷涂问题,也有相关人员开始设计一种智能化的喷涂机器人。0
作为工业机器人,自动喷漆粉刷机器人既能极大减轻工人的劳动强度、提高工作效率,又更加符合安全环保和高质量的喷涂要求,中国喷涂机器人市场将迎来快速发展时期。
1.2市场机会
1.3目标市场及产品定位
1.3.1目标市场
1.本产品偏向于中档产品定位,目前没有生产同系列的低端产品,生产线尚不完善。目前,我们的产品主要占据中档市场,着眼于商场、工厂、房屋等建筑的室内装修,采取销售和租赁的方式进入市场。
2.为了以多样化覆盖各个档次的市场,我们将针对高档、中低档次去研究同系列产品的其他产品,以确保企业的利益,尝试多方面地涉猎其他细分市场。
1.3.2产品定位
产品定位主要将房屋装修行业作为第一市场,针对不同的墙体面积,墙体质量以及墙体用途制定不同的产品组合,满足不同消费者需求。我们立志于生产装修业内的新型机器,推动装修业的技术发展与提升,简化人工劳动提升工作效率。对于部分室外墙体的刷漆粉刷,尤其是高层建筑以及对不规则形状的外墙体,则更需要机器来替代人工劳动力。
1.4未来市场预算
1.4.1市场容量估算
我国每年新增的建筑面积占世界总量的50%,据调查显示,中国喷涂机器人市场规模正在逐步扩大,2020年中国喷涂机器人市场规模为139亿元,较2018年的123亿元同比增长13.0%,预计2022年市场规模可达到200亿元,市场容量约为260万台。
1.4.2预计的市场份额
以中端装修公司市场为基础,向低端和高端市场进军,重点进军北上广及新一线城市。在5到15年内在自动刷墙机器人行业占领30%-50%的市场份额。
2 创新点与项目特色
2.1项目情况
自动喷漆粉刷机器人产品集合双目立体视觉+IMU架构、红外感应技术、自动刷漆技术等技术,配合单片机的运算,能实现墙面上任意方向移动和室内空间的360°的运动,解决天花板及角落粉刷的问题;能实现粉刷墙面时墙面的定位、障碍的识别、窗口的识别和使用粉刷力度的大小,以实现智能化控制;能实现精确智能控制粉刷墙壁机器人实现墙面涂漆工作,完成绕过障碍物、绕过窗台实现智能涂漆。
2.2项目基本原理
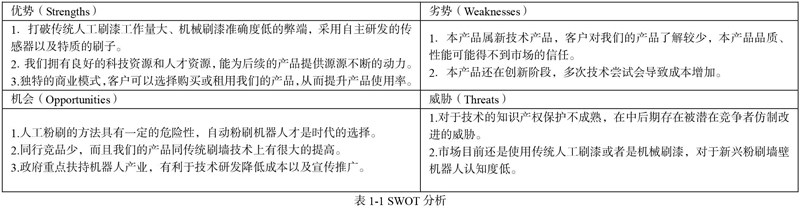
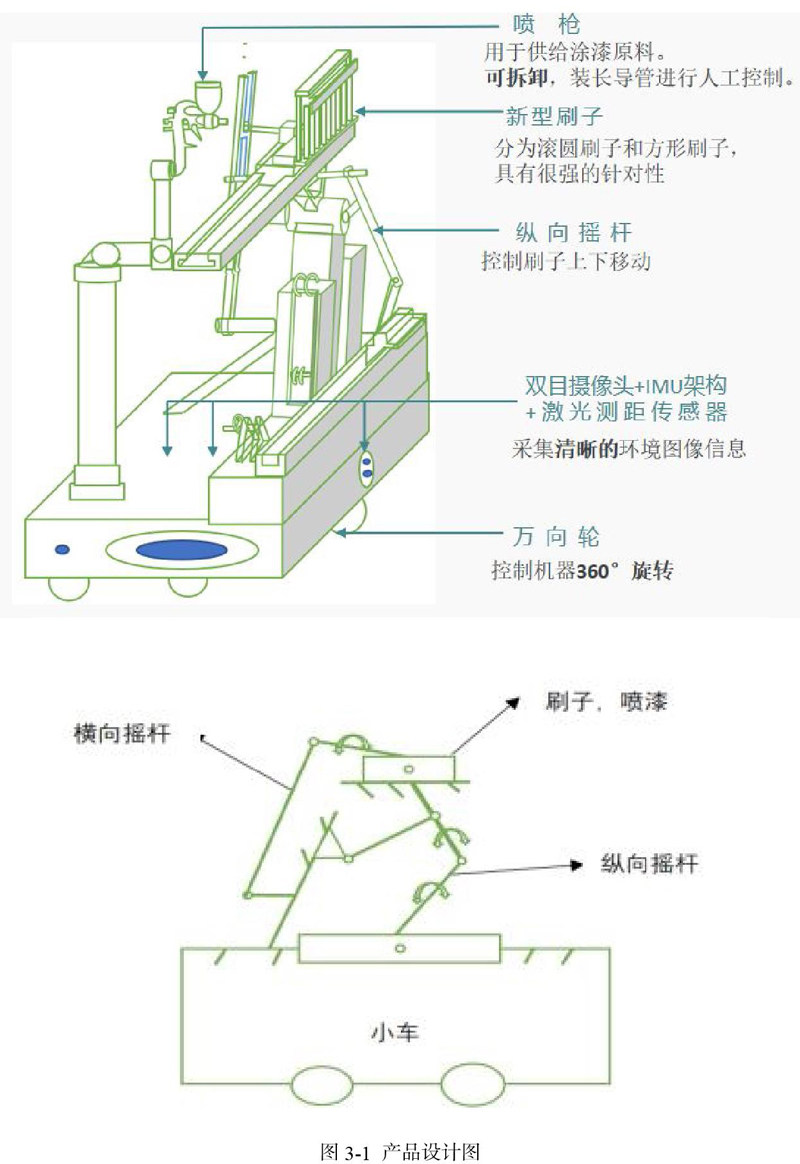
整个自动喷漆粉刷机器人由车体,自动粉刷装置,传感部分,控制部分组成。机器的水平运动采用车体来实现,即整个粉刷机构装在小车身上,这种结构动作灵活,结构紧凑,工作范围大,占地小,能量消耗较小。自动粉刷机器人部件由车体,控制刷子上下移动的摇杆,控制刷子左右移动的摇杆,固定的机架,末端执行器(喷枪及刷子)组成,其设计图如图3.1。
自动粉刷机器人创新之处在于采用了双目立体视觉+IMU架构及多种传感器的融合,自动粉刷机器人前端由两枚摄像头组成双目摄像头。双目立体视觉是计算机视觉研究最重要的组成部分之一,构建一个双目视觉系统用来测量相机与物体的距离。0通过双目相机进行图像采集。车体部分还包含六轴传感器(IMU)、防跌落传感器、光流传感器等。多种传感器结合不仅使得机器人反应灵敏,定位精度高,而且提高了图像源的识别精度,可以输出高精度同步的图像源。
2.3产品的创新性、先进性、独特性
1)部件设计更具创造性。机器人粉刷时能实现两个方向的运动,增加一次定位粉刷的范围,承重底座下安装的万向轮,便于机器人在室内进行多方向移动,实现天花板的粉刷和角落粉刷的问题;新式刷子中的方形刷子,方形设计更能对狭小区域进行粉刷处理,具有很强的针对性。
2)采用双目立体视觉+IMU架构,即激光导航+视觉传感器及IMU传感器的融合方案。它是基于视差原理,利用成像设备从不同的方位来获取被测物体的两幅图像,再通过计算图像对应点间的位置偏差,最终获取物体三维几何信息的方法。
2.4 竞争优势
1)成本造价较低。传统的基于激光测距传感器的SLAM所需的硬件成本也更高,以及激光雷达测距传感器损坏时维修成本也更高。
2)不易受光线干扰。传统的基于视觉传感器的SLAM也具有同样弊端,很容易受到环境光的干扰,而非主动光源测距传感器在光线条件不好的情况下几乎无法工作。
3)细节处理更精准。集合双目立体视觉+IMU架构、红外感应技术、光电传感器等,配合单片机的运算,实现天花板的粉刷和角落粉刷的问题,完成绕过障碍物,绕过窗台实现智能涂漆。
3 结语
本产品通过科学的产品设计以及合理的销售策略,能实现机械与控制的完美结合,采取喷漆为主、刷漆为辅的工作理念,形成新型的喷漆粉刷机器。强房屋建筑装饰装修施工技术管理,提高房屋建筑装饰装修质量。0本产品将打开新的行业市场,使得新技术新产品步入市场并在未来将不断占据市场,通过不断的改进升级,更好地顺应市场潮流,获得回报。
参考文献:
[1]梁渝普,刘潇翔,李俊楠,肖绍裕,王玉琳.高层建筑外墙智能喷涂机器人的设计[J].机械工程师,2022(07):94-97.
[2]沙春伟,蔡鹏德.基于双目立体视觉的视差测量[J].电脑知识与技术,2022,18(07)
[3]吴华宇,王汉林.房屋建筑装饰装修施工技术管理[J].房地产世界,2022(06):125-127.
作者姓名:陈时;性别: 女;出生年月:2001.08.10;学历: 高中 本科在读;籍贯:广东揭阳;民族:汉族;职称:无;研究方向:会计学;工作单位: 桂林电子科技大学;工作单位邮编:541004
本文是2022年广西大学生创业训练计划“基于双目立体视觉+IMU架构的自动喷漆粉刷机”项目成果(项目编号:S202210595364X)。

 京公网安备 11011302003690号
京公网安备 11011302003690号


