



- 收藏
- 加入书签

治超非现场执法系统中称重准确度影响因素分析
 打开文本图片集
打开文本图片集


摘要:伴随国内经济的快速发展,交通运输行业发展迅猛,但由于市场管理缺陷及司机多拉快跑心理,超载超限问题已成为危害道路交通的顽疾。治超非现场执法系统作为新型国省道及高速公路通行车辆重量快速检测的重要手段,对保障公路货运安全将起着至关重要的作用。但目前该应用场景存在环境复杂,车辆检测速度高,司机驾驶行为难以约束等不利因素,导致系统称重准确性难以保证,因此在系统校准及使用过程中不仅需要量化各影响因素并加以修正补偿,同时还需要通过管理手段约束司机文明驾驶。
关键词:治超非现场执法;高速动态称重;称重准确度
Abstract:with the rapid development of domestic economy,the rapid development of the transport industry,but due to market management defects and drivers Dora running psychology,overload has become a serious problem of harm to road traffic. The off-site law enforcement system,as an important means of rapid weight detection of new national and provincial roads and expressways,will play a vital role in ensuring the safety of highway freight transportation. But at present,there are some disadvantages in the application scenario,such as complex environment,high speed of vehicle detection,difficult to restrain driver's driving behavior,etc.,therefore,in the process of system calibration and use,it is necessary not only to quantify the factors and correct the compensation,but also to control the driver's civilization by means of management.
Key Words:super off-site law enforcement;high-speed dynamic weighing;weighing accuracy
一、引言
公路货运车辆超限超载运输问题已成为危害公路交通可持续发展的“痐疾”,近些年来,全国各级政府不断加大治理公路车辆超限超载运输的力度,取得了重要的阶段性成果。但是由于复杂的社会经济因素,全国超限检测形势仍很严峻,反弹的隐患并未消除,巩固治理成果,持久推进超限检测工作压力依然很大。因此治理车辆超限超载运输是一项长期性、日常性工作,必须持之以恒,把治理超限超载工作纳入长效机制至关重要。一个布局合理、良性运转的治超不停车检测系统既是科学检测、规范执法、遏制公路“三乱”的物质基础,也是对超限超载车辆起到法律威慑作用,还可以扩充功能使之成为道路稽查,打击非法运输经营的侥幸心理,及时把控和消除包括超限超载运输在内的各种非法运输经营行为的必然要求。
目前在道路上常见的治理手段主要是有人值守低速超限超载检测系统和精确较低的高低速检测系统;但是在高速公路交通安全管理中,由于高速公路、国/省道、桥梁中,路线长、机动车流动性大,仅仅依靠路政部门拦截车辆进入治超站内接受检查当场处罚的执法工作方式,已不能适应当前道路交通安全管理形势发展的需要。
全国集中治超以来,各地陆续建设了一批治超检测站点,它们作为路面联合执法的重要载体,曾经发挥了重要的作用。但因未有一个完善的信息系统相联系,检测站点各自孤立作战,路面执法和源头治超相互脱节,基础信息和管理资源不能共享,不仅使得初期大规模设置检测站点的功效大打折扣,更少极大地影响了集中治理的效率和效益。因此,统筹建设一个互联共享,运转协调,规范高效的全市性车辆超限监控网络,对于推进治超长效机制建设极为重要。治超非现场执法和高速预检系统作为新型国省道及高速公路通行车辆重量快速检测的重要手段,对保障公路货运安全将起着至关重要的作用。
二、治超非现场执法产品类型
治超非现场执法产品中高速动态称重系统是整个产品的核心所在,而称重单元作为高速动态称重系统的输入端,更是整个系统的重中之重。目前,整个行业经过几十年的发展,各企业依托自身优势相继开发出了各部相同的高速称重单元,但究其根本,主要分为两大类:应变式和压电式。应变式称重产品虽然传统但应用更为广泛。主要有以下几种产品:
1.窄条式动态称重系统
窄条式动态称重系统中,电阻应变式窄条称重传感器为核心检测部件。其结构形式可以理解为多个桥式称重传感器组合形成的单路条形称重传感器。使用方式直接嵌入式安装于道路表面,并与路面保证平齐。其常规尺寸有1m、1.5m、1.75m、2m,宽度仅有70mm左右,远小于车辆轮胎触地尺寸,因此车辆轮胎在经过时,只能测量不完全轮载力。在车辆通过时,传感器部分位置产生形变,同时产生模拟信号,由机械形变量的大小来反映力的大小。其最大的优点在于安装便捷,属于传感器直接测量形式,低速准确性高。但因其有效检测区极小,导致行车速度对其称量准确度影响极大,因此在实际使用时多采用三排、四排布设方式,来弥补速度的影响。同时该传感器在设计时为保证单点输出信号足够大,结构强度普遍设计偏小,导致传感器输出频响低,同时易产生过载损坏问题,并且该传感器维护成本较高。因此,窄条式动态称重系统多适用于通行车速较低,超载问题不严重的场景。
2.弯板式动态称重系统
弯板式动态称重系统中采用的称重传感器与窄条称重传感器原理一致,其内部集成了多组应变片网,在车辆经过时,其内部应变片网受压产生形变达到测量目的。称重原理是传感器内部的应变片网受到载荷压力产生形变进行测量。其安装方式同样嵌入式安装于道路表面,与路面保证平齐。外形尺寸长度多为1.5m、1.75m、2m,宽度尺寸多为0.4-0.6m,属于全胎测量形式。其主要优点为测量的压力和实际轮重载荷的线性关系较好,并且因其为薄板结构,车辆沿水平方向冲击对传感器测量准确度影响小。其弊端:车辆经过时,变形量大,频响低,因此只适用于低速测量(车速40km/h以内)。
3.石英式动态称重系统
石英式动态称重系统中石英动态称重传感器是近几年发展的动态称重技术。依托国外产品及技术的引进、国内石英材料加工工艺技术的提升及石英传感器的迅速发展,石英式动态称重传感器已逐渐开始在动态称重系统中应用。
石英动态称重传感器利用石英的压电效应实现载荷测量。在车辆轮胎通过石英传感器时,石英晶体受压产生电荷,所产生的电荷量大小与载荷成正比,该电荷在经过电荷放大器转换,实现重量测量目的。石英动态称重传感器外形尺寸与窄条传感器基本一致,宽度甚至比窄条传感器更窄,只有40-50mm,因此轮胎经过时属于部分测量。石英称重传感器主要有响应频率高、大量程、抗干扰能力强、检测灵敏度高等优点。但因其宽度较窄,对车辆通行速度极为敏感,多采用多排布设改善,同时压电效应产生的电荷不能长时间保持,因此不适用于低速称量。
4.平板式动态称重系统
平板式动态称重系统在传统轴重仪称重技术上,做了重大改进。将传感器安装形式由直接测量形式调整为间接测量。间接测量:即称重平台与边界约束采用一体化设计,在不改变重平台受力条件的基础上,将测量传感器安装在称重平台关键传力部件上,用来感知传力部件因称重平台受载而产生的微变形。在这种方式下,称重平台在测量过程中处于全约束状态,无需复位,同时称重平台结构强度远大于称重传感器,因此有效提升系统响应频率。
平板式动态称重系统具备高频响、动态特性好、易维护等特点,但因其采用间接测量方式,导致系统静态特性和输出线性较传统轴重式动态称重系统差,算法复杂。目前该系统适用于全速度段的动态称重系统,也是与治超非现场执法场景契合度最高的产品。
三、动态称重准确性影响因素分析
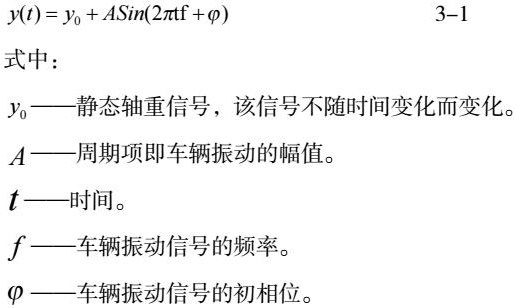
动态称重因其使用环境条件复杂,导致其技术难度较静态称重大幅度提升。车辆经过称重平台时产生的信号可以看作是车辆的静态称重信号与周期性的车辆振动信号的叠加。
下式为车辆动态称重输出信号:
式中:
——静态轴重信号,该信号不随时间变化而变化。
——周期项即车辆振动的幅值。
——时间。
——车辆振动信号的频率。
——车辆振动信号的初相位。
上式中信号主要受路面坡度和称重平台自身静态准确度影响;
车辆震动幅值主要受道路平整度与车辆震动状态影响;
振动频率主要受车辆类型、载重量、速度及路面平整度影响;
振动信号初相位属于随机值,路面平整度有一定影响。
综上所述,影响因素主要分为环境、称重平台自身和车辆自身因素三大类。环境因素主要有路面坡度、路面平整度;称重平台自身主要为结构形式和硬件保证;车辆自身因素包括运动状态、行驶速度等条件。
四、环境因素
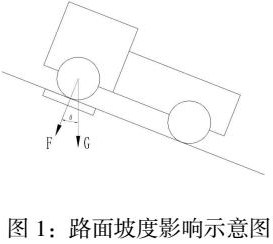
1路面坡度
路面坡度引起的静态轴重测量值误差,主要原因为称重平台所受正压力方向与重力方向不一致,这导致只有真实轴载荷沿垂直称重平台方向的分力被测量,如下图所示:
单轴实际载荷G,路面坡度θ,垂直称重平台方向分力为F,因此
称重系统实际测量值为F,小于真实轴重G,坡度θ越大,实测值越小。
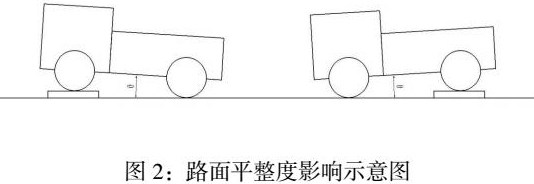
1)路面平整度
治超非现场执法系统多数安装在国省道,其环境通常比较复杂,而在现场安装之前,必须对现场位置进行实地勘察,确保安装位置平整度尽可能高。但在实际项目实施过程中,该问题不可避免,无论是原始道路、施工人员、天气、材料、环境变化等因素都有可能导致路面不平整增大。而车辆在该路面通行时,如下图所示,汽车在上秤前由于路面或安装原因将会产生了严重振动甚至跳跃的情况,这将大幅度影响系统称重准确性。
2.称重平台
1)结构形式
称重平台自身结构形式至关重要,它是所有动、静态称重的根本,因此称重平台自身必须要有足够的静态准确度。而称重平台静态准确度主要与结构形式、传感器性能及安装可靠性等因素关系密切。目前市面中所有称重产品静态准确度均能保证在百分之一以内,直接式称重系统甚至能达到千分之五以内。但作为动态称重系统使用时,尤其是高速动态称重系统,产品的动态响应频率至关重要。以目前最窄的石英式动态称重传感器为例计算:传感器宽度50mm,车辆最高通行速度120km/h,计算得到单轴最短通行时间为1.5ms。在不考虑采集时长的前提下,石英传感器的频响也需要超过667Hz才能达到测量需求,而实际在考虑采集周期后,各产品响应频率应不小于10倍的最低测量要求(通过有效测量宽度和最高通行速度求得)。
2)硬件保证
硬件中主要保证采集速率和采集精度足够。还是以石英式动态称重系统为例。计算所需最低数据量为150条,即1.5ms内必须采集150次,计算的采集速度最低为100K。采集精度主要和量程、分度值有关。目前市面中产品最大单轴载荷为50t,为保证1kg采集精度,采集精度必须做到16位。
3.车辆自身因素
1)运动状态
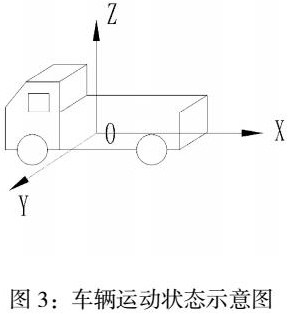
车辆在行驶过程中看似沿着确定方向做单向移动,但真实情况是多个方向运动叠加混合的综合运动状态。而车辆在动态称重时多以轴重计量为准,因此各方向的运动都会影响称重结果的准确性。如下图所示,是车辆运动示意图,车辆运动状态共有以下六种状态:
(1)沿X轴直线运动。这种状态是指车辆沿行车方向直线移动。该运动不会对车辆轴载称重结果产生影响。
(2)沿Y轴直线运动。该运动状态主要由车辆斜向行驶产生。在该运动状态下,只要同一轴的两侧轮胎存在同时完全称重的条件,就不会影响最终称重结果。在车辆斜向行驶严重时(即同轴两侧轮胎完全独立,无同时称重采集条件),对称重结果不会产生影响,但会因为多少轴问题影响车型判断准确率。
(3)沿Z轴直线运动。这种状态是汽车在 Z 轴方向的振动。因为与汽车俯仰状态相似,Z 轴方向的振动运动必然产生非水平面内的干扰力,这将严重影响称重测量结果。
(4)沿X轴转动。这种状态是指汽车同一个车轴的重量从一侧移动到了另一侧。这样的运动方式对称重结果的影响不大,因为在称重时,要求车辆同一轴的两侧轮胎同时过秤,单轴的总重并没有发生改变。
(5)沿Y轴转动。这种状态是指汽车前后轴间进行重量转移。这将对称重结果产生一定影响,因为重结果产生偏差。当汽车前轴过秤,如果其前端往下降,最终结果将偏大;随后,在后轴过秤时,车辆后端也下降,称重结果将再次偏大,最终的总重也偏大;相反,如果处于上跳状态,总重会偏小。
(6)沿Z轴转动。这种状态停留在水平面上。由于只在水平面产生力,没有垂直干扰力,不会造成最终精度的偏差。
因此,在这些运动状态里,跳降和起伏运动对动态车辆称重结果干扰最剧烈,剩下的几种方式都是次要的。而引起汽车沿 Z 轴起伏、振动的原因是汽车的轮胎动态载荷力。以产生振动原因为标准,将其分为以下几类:
(1)车辆自身振动。这其中包括各种不同纹理车轮所产生的周期性微振动,燃料燃烧不充分导致的振动以及驾驶员不稳定行驶(变向、加减速、刹车)造成的振动。
(2)地面不平整。在进行动态称重的时候,地面的凹凸不平以及高低起伏均会引起车辆的随机振动。
(3)车辆与地面耦合振动。称重时,轮胎对地面有外力作用,必然引起路面的形状变化;而路面也有反作用在轮胎上,必然使车辆受垂直力影响引起振动。尤其是动态称重过程中,称台的弹性模量不同于路面,相互间耦合更加明显,也是无法避免的干扰。
2)行驶速度
依据刘汉平等人关于《汽车的运动速度对动态称重结果的影响》文章中的论述得知,车辆在动态称重过程中其相对误差为:
式中,S为秤台长度,V为过秤速度,ω为与称重系统固有频率、阻尼系数相关的常数。
根据上式得知,车辆低速过秤时误差较小,随着车速增加,误差也会相应增大。车辆在匀速过秤时可以看成简谐振动,前半周期车辆受振动影响处于超重状态,车辆轴载大于自重,导致最终结果变大;后半周期则失重,轴载小于自重,结果变小。货运车辆在动态行驶过程中,其振动频率在0.5-10Hz之间,频率较低,这导致车辆单轴在通过秤体时,只有部分简谐振动波形具备采集条件,而且速度越快,采集波形完整性越差,数据准确度越低。
车辆动态称重系统允许过秤速度和称重精度互相矛盾,如何使它们完美结合一直是动态称重领域一个热点和难点。当车速增加时,汽车沿路面垂直方向的振动幅度会随之增加,而汽车振动正是动态测量的主要误差源;另一方面,汽车过秤时间会随速度增大而缩短,称重传感器测量到的有效轴重信号就会减少。这些均给称量精度的提高造成困难。
另外,车辆行驶过程会对路面产生恒定作用力,路面不平度和车身发动机等振源使车辆行驶时不可避免有随机振动,这振动通过轮胎作用在路面上,这种动态轮胎力会引发道路表面发生应力和应变,导致嵌入式安装的称重平台受力状态发生改变,出现称重偏差。速度越快,动态轮胎力与道路表面相互作用力越复杂,车辆动态称重误差就增大。
五、结束语
公路超限超载非现场执法系统的应用,能够实现科技化、智能化、全天候执法,是公路超限超载非现场执法的新趋势,国家交通部门在政策上给予了充分支持。从目前来看,公路超限超载非现场执法效果得到了全国各地交通部门的肯定。未来需要重点解决公路超限超载非现场执法系统遇到的技术难点,提高非现场执法系统的性能,尤其是高速动态称重技术在车辆复杂行驶环境下保证称重系统称重的准确度和稳定性。高速动态称重产品因其使用环境及车辆行驶行为原因,导致其技术难度较低速动态称重产品大幅度提升。因此,为保证产品称重准确性及可靠性,需满足以下几点:
1称重平台
称重平台作为称重信号的源头,其输出特性将直接影响称重准确度和稳定性。为保证准确性,称重平台需保证良好的输出线性和重复性;为保证高速称重,称重平台的响应频率必须足够高,以此来保证测量数据的真实性和有效性;为保证有效数据量,硬件采集速度需足够高,为动态算法模型的建立提供数据保证;为保证环境适应性,称重平台在设计过程,需消除或降低环境温湿度变化对系统称重准确度的影响。
2数据处理算法
高速动态称重系统使用环境复杂,影响因素众多,不能以简单、粗暴的数据处理方式构建算法模型。必须将足够多的影响因素都引入到算法当中,并对各因素的影响开展补偿算法研究,以此来还原真实信号,达到准确称量的目的。
3路面施工质量
在动态称重系统中,称量区域不仅是称重平台,还覆盖到前后引坡区域。如果前后引坡区域施工质量很差,道路崎岖不平,车辆通行时颠簸振动严重,那么即使是再好的动态称重系统也无法正常使用。因此在选点和施工过程,必须保证称重平台前后具备足够长的平直段引坡,以达到车辆平稳通行的目的。
参考文献:
[1]张文斌.公路车辆动态荷载测量及车型分类技术的研究[D].哈尔滨工业大学,2009.
[2]刘汉平,王健刚,陈冰泉。汽车的运动速度对动态称重结果的影响[J]。中外公路,2006,18(4):231-234.
[3]高哲.公路超限超载非现场执法系统分析.山东交通科技,2022,3:171-173.
[4]郁峰.平板式动态称重系统的算法设计.技术交流,2020,8:49-51.
[5]陈日兴.谈我国高速动态称重技术及装备的发展思路.科技应用,2007,02:20-25.
[6]罗万华.治超非现场执法系统探究.中国交通信息化,2022,01:117-120.
作者简介:王凯(198X -),男,天津人,公路工程专业,硕士,主要从事交通运输综合执法非现场执法试点建设、治超联网建设等方向的研究。

 京公网安备 11011302003690号
京公网安备 11011302003690号


