



- 收藏
- 加入书签

基于PLVC控制器的发射车控制系统分析与设计
 打开文本图片集
打开文本图片集
摘 要:武器装备对发射车的姿态调节速度及精度要求在不断提高,需要在各种恶劣条件下,提供适应的水平度、方位角及俯仰角,以实现快速、精确打击。本文以某型装备发射车为模型,根据其电源、平台水平度、方位角、俯仰角指标要求,以PLVC为核心,对控制系统进行了分析设计。文中详细论述了发射车控制系统总体方案,并对系统硬件、电气接口、控制策略、通讯方式及控制算法分别进行了分析与详细设计,完成控制系统功能调试验证,为系统的工程实现提供指导。
关键词:发射车;姿态调节;PLVC;控制系统;设计
1引言
随着军用装备功能和复杂程度的加大,需要发射车在到达发射阵地时能给装备地面发射提供适应的水平度、方位角及俯仰角。发射车能否在各种恶劣条件下完成姿态高速及高精度调节是实现武器装备快速反应及精确打击的基础。以往的姿态调节工作主要依靠手动操作液压千斤顶或丝杠,并通过气泡水平仪来实现,调节时间较长,可靠性低,可操作性差[1]。近年来,随着机电液一体化的发展,如何缩短作战准备时间,快速完成装备展开、撤收成为发射车控制系统设计需要优先考虑的重要指标。而自动控制系统也已广泛应用于导弹发射车、机动发射装置、测控装置、情报雷达天线座车、坦克火控调试台等设备[2]。同时国内外无人机技术的高速发展,无人机正在成为现代高科技战争中不可或缺的武器,越来越多地装备各国陆海空三军,执行攻击、侦察的作战任务及靶机的训练任务等,效果显著,应用领域也不断扩大[3]。
2总体分析与设计
2.1系统总体需求
发射车控制系统一般需要在发射阵地对自身姿态进行自动调节,主要包括基于地形对水平度进行自动调节、基于发射朝向对方位角进行自动调节以及基于发射俯仰程度对俯仰角进行自动调节。为了实现上述目的,控制系统要能控制发射车液压系统,完成发射车姿态调整。
2.2通讯方式
控制系统作为发射车的控制中枢,数据通讯是否稳定可靠是决定发射车能否正常工作的重要因素。目前,常用的通讯方式有RS422、485、CAN总线等。其中CAN(Controller Area Network)是ISO国际标准化的串行通信协议,是一种有效支持分布式控制或实时控制的串行通信网络,具有冲突少、传输可靠实时性强、传输距离较远、抗电磁干扰能力强、成本低、检错能力强等优点。
2.3控制策略
控制系统支撑方式包括三点支撑、四点支撑、六点支撑等。发射车重量约15吨计,采用四点支撑,稳定性、精度能得到较好的保证。
由于根据双轴倾角传感器的数据可以确定平台四个点中的最高点,可选择同时调节一个方向的两条支腿可有效避免支腿悬空,降低“虚腿”出现的可能性,并且支腿上升速度相同,有效简化调平流程。
发射平台的旋转是通过主控制器产生旋转驱动信号,驱动电液比例阀,使液压旋转装置按照需要进行相应的动作,最终实现发射平台的旋转调节。为了减少平台旋转时对发射车的冲击,可对较大角度旋转过程进行二级变速控制。
发射平台的俯仰角调节通过控制系统驱动单个液压俯仰执行机构完成。
3硬件集成设计
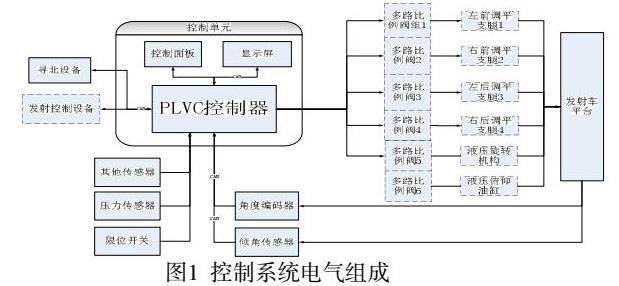
3.1电气组成
根据总体方案设计要求,综合考虑现有技术条件,控制系统主要由PLVC控制器、控制面板、显示屏、传感器等组成,如下图所示。
PLVC控制器、控制面板和显示屏集成为控制单元,作为整个控制系统的中枢,可为液压执行机构提供驱动信号,使其按要求执行相应的控制命令,同时接收反馈传感元件的信息反馈,最终实现发射平台的调平、俯仰、旋转等。
3.2控制单元
控制单元包括插箱、PLVC控制器、控制面板、显示屏等,PLVC控制器作为控制系统的控制中枢和软件的硬件平台,能对显控按钮、压力传感器及到位开关等模拟量数字量输入信号进行采集,实现与显示器、倾角传感器、角度编码器及发射控制设备的CAN通讯,同时预留RS232通讯,并处理、存储和转发相关数据,可直接输出比例阀驱动信号和数字量模拟量控制信号。
3.2.1PLVC控制器选择
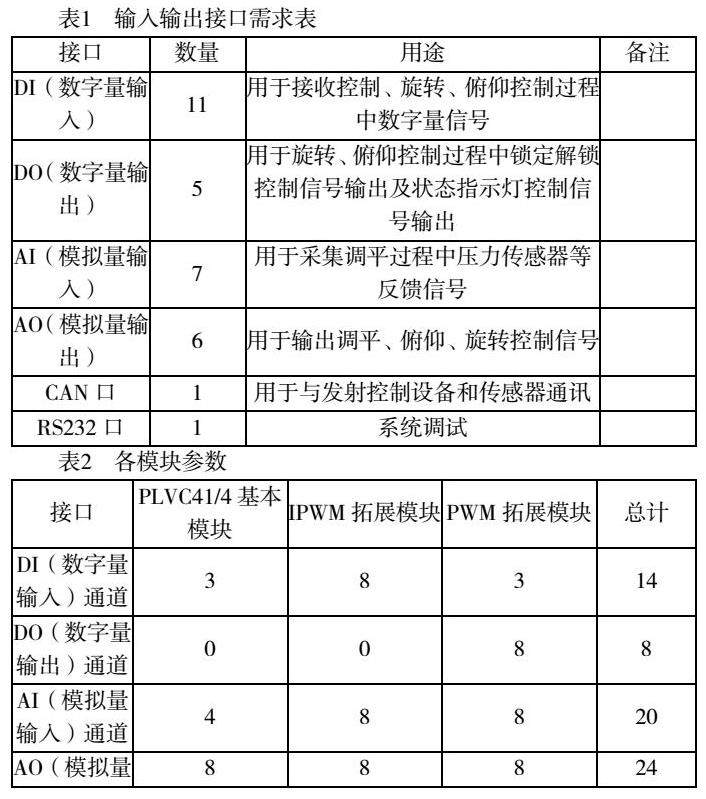
对控制系统接口进行分析,PLVC控制器需满足下表要求。
只要采用1个PLVC 41/4基本模块、1个IPWM拓展模块及1个PWM拓展模块,能够满足控制系统对主控制器的要求,富余接口可以作为备用,便于控制系统优化升级。
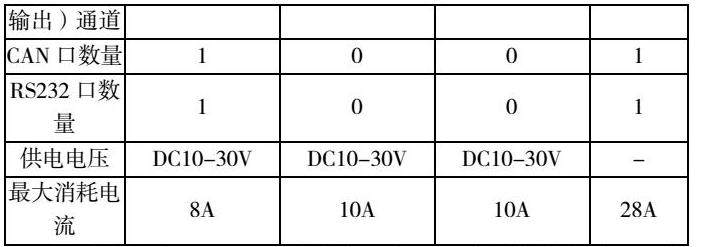
3.2.2显控面板
显控面板是控制系统人机交互接口,主要作为操作人员执行控制命令,选择相应的控制流程,完成发射车状态调节的操作面板,同时显示控制系统主要控制流程和状态信息,主要由控制面板及显示屏组成。
控制面板是发射车状态调节操作界面,主要由面板、电源开关、发射车准备好开关、调平控制、旋转控制、俯仰控制、展开、撤收、停止、显示屏交互(包括上移/加、下移/减、确定)按钮及闪光蜂鸣器等组成。
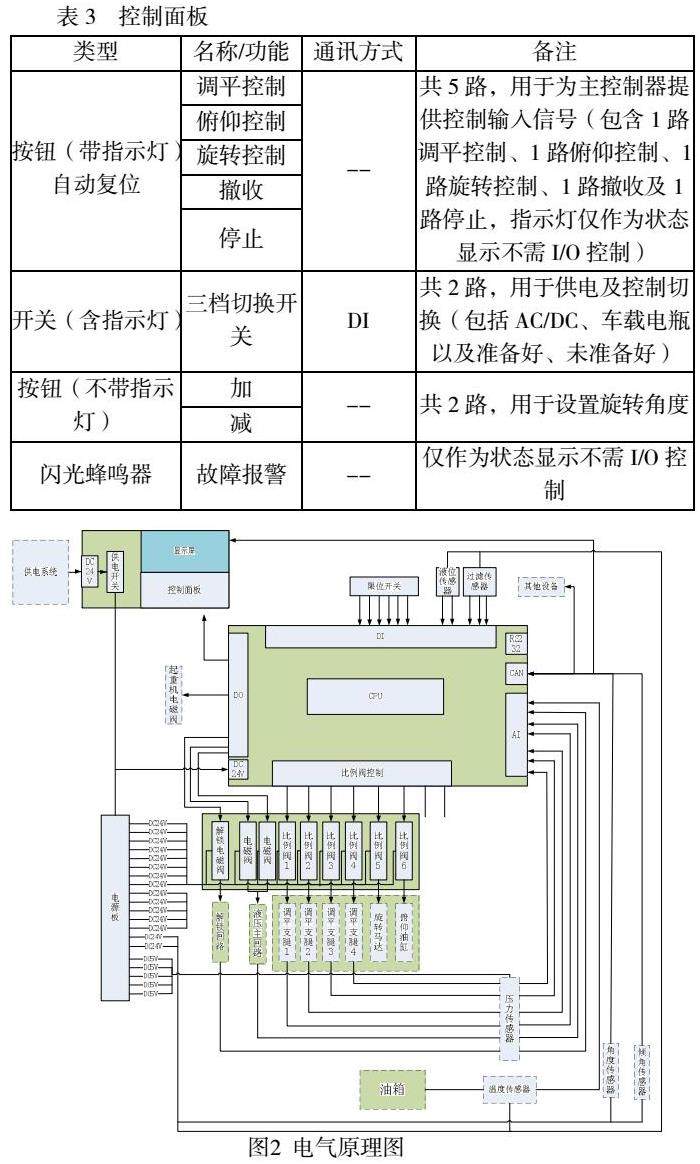
3.3电气原理
根据上述硬件配置控制系统详细接口,电气原理如下图所示。
4控制算法
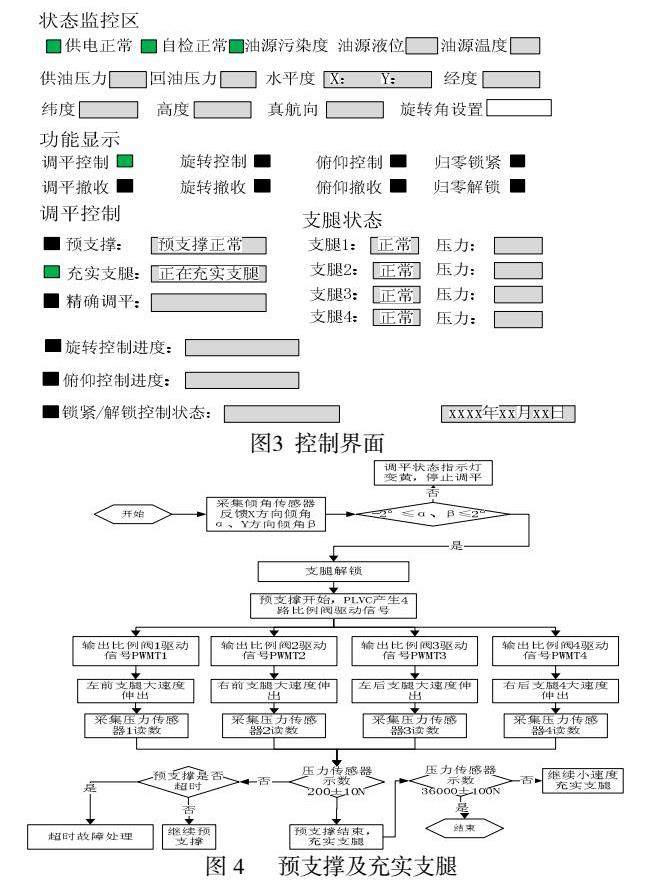
基于显示屏对控制系统界面进行设计,其具备显示液压系统主要参数、控制动作及状态的能力,如下图所示。
4.1调平算法
发射车控制系统接收显控面板的控制命令并实时反馈发射车状态。调平控制过程中,PLVC控制器接收来自显控面板的功能选择使能信号,进行自动调平控制流程。
调平过程中,为保证发射平台的稳定,需采用变速调节的方式控制调平支腿,具体如下:
(1)调平开始前,先以较快的速度伸出支腿进行预支撑;
(2)支腿接触地面时,以较慢的速度进行支腿充实,使每个支腿都处于完全受力状态即消除“虚腿”;
(3)根据双轴倾角传感器反馈的平台倾角确定平台的最高点,按角度误差控制法控制相应支腿进行动作,最后判断平台倾角是否满足精度要求,如不满足还需进行循环多次精确调平,使平台水平倾角满足要求。
(4)最后再进行一次支腿充实并限位,调平过程结束。
4.1.1预支撑及充实支腿
a) 预支撑
预支撑主要完成发射车调平前的准备工作,为充实支腿和精细调平提供合适的条件。开始执行调平控制时,需要将各液压支腿伸出,为保证调平控制及时有效,支腿可以较大的速度伸出,当各支腿都有效触地后,即压力传感器示数达到200±10N,预支撑结束,如下图所示。
b) 充实支腿
充实支腿能够使发射车调平时各支腿充分受力,防止产生“虚腿”现象,保证发射车稳定性,在整个调平控制过程中,需要进行两次充实支腿流程:当预支撑完成后,需要以较小的速度继续伸出支腿,直至支腿受力充分;由于在精细调平完成后,仍有可能出现“虚腿”现象,故还需再次进行充实支腿。当各支腿充实,即压力传感器示数达到36000±100N,充实支腿结束。
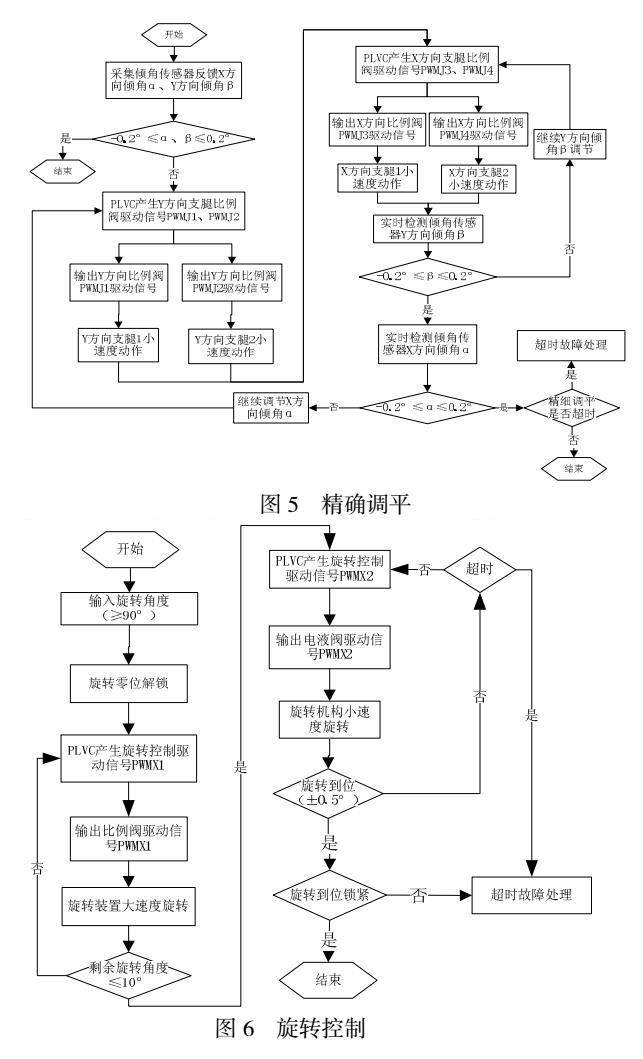
4.1.2精确调平
精细调平是调平控制的主要步骤,主要目的是使发射车调平精度满足靶机系统要求。精细调平能够根据双轴倾角传感器的实时倾角反馈,实现对发射车水平度的闭环调节,直至发射车调平精度满足要求,如下图所示。
4.2旋转算法
发射车旋转控制主要完成靶机发射方位角的调节和归零,综合考虑靶机系统对旋转控制的要求,需要对发射车旋转作变速控制,在需要旋转的角度较大时,旋转动作速度也相应较大,在需要旋转的角度较小时,为了防止旋转平台在到位时产生较大的冲击,旋转动作的速度也相应的减小。旋转控制包括正转和反转,如下图所示。
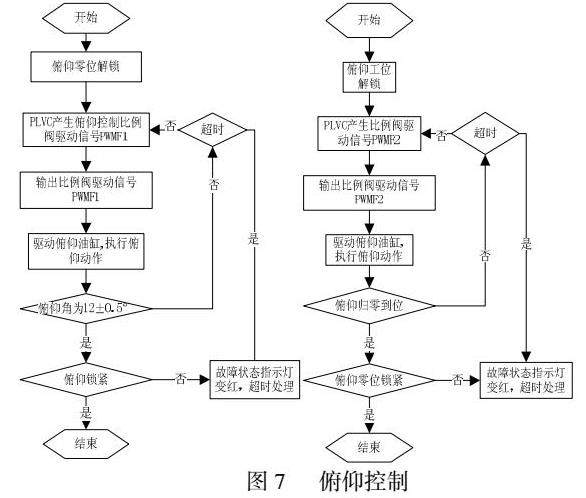
4.3俯仰算法
发射车俯仰控制主要完成靶机发射俯仰角的调节和撤收,综合考虑系统对俯仰控制的要求,如下图所示。
5结论与展望
控制系统主要以控制单元为核心,其外形尺寸适应标准4U机箱,可安装于发射车机柜,控制功能正常,精度满足设计要求,能够在较短的时间内,完成发射车的调平、旋转、俯仰,显控面板能正常显示控制系统状态。
参考文献:
[1]褚新峰,杨曙东.车载雷达电液自动调平系统[J].液压与气动,2007(05):56-58
[2]周春燕.基于PLC的自动调平控制系统研制[D].西安电子科技大学.2010
[3]何庆,刘东升,于存贵,张丽静.无人机发射技术[J].飞航导弹.2010(02):24-27
[4]盛英,仇原鹰.六点支撑液压式平台自动调平系统[J].液压与气动,1999(4):24-26
[5]谢经明,曹家勇,陈幼平等.基于伺服系统的车载自动调平系统研究与开发[J].电气传动自动化,2004,26(2):33-34
[6]HongjunYang,GangyanLi.Research on an Automatically Leveling Control System for Vehicle-borne Platform with High Accuracy. Proceedings of the 2006 IEEE/ASME International Conference on Mechatronic and Embedded System and Applications.(MESA06):432-436

 京公网安备 11011302003690号
京公网安备 11011302003690号


