



- 收藏
- 加入书签

使用随机矩阵描述激光雷达目标空间扩展属性的贝叶斯估计方法
 打开文本图片集
打开文本图片集
[摘要] 在机器人和智能驾驶领域,随着传感器分辨率的提高,对目标空间扩展属性的估计变得日益重要。本文使用随机矩阵方法描述了激光雷达目标的空间扩展属性,在贝叶斯框架下,获得了目标状态和空间扩展属性的联合递推估计。实验表明,估计的状态和空间属性对量测的剧烈波动产生了较好的平滑和位置补偿效果。
关键词 随机矩阵;激光雷达扩展目标;跟踪;贝叶斯估计
前言
随着传感器分辨率提高,目标的空间扩展属性能够准确地获取,这为智能驾驶、机器人领域的环境感知和避障等功能的实现提供了保障。
目前,机器人、智能驾驶等领域常用的目标跟踪方法,一般是将目标作为质点建立运动学方程,使用Kalman滤波方程进行位置、速度和加速度的估计,而忽视了目标的空间性质。然而,障碍物和运动目标的空间信息对于属性识别、路径规划、速度规划和控制等功能的影响是不能忽视的。
在ADAS应用的视觉和激光雷达传感器,能够将目标的空间属性以包络矩形报出。但目标矩形往往发生大幅度波动和漂移,从而引起目标的位置和速度估计剧烈波动,这对于ACC应用和决策控制产生较大影响。目标矩形的波动,主要由以下三方面的原因:(1)连续障碍物探测矩形的位置漂移,如道路两旁的栅栏、墙面;(2)传感器从不同视角探测目标,引起目标包络矩形波动,如机动车转弯时探测视角变化;(3)目标的空间属性没有平滑处理或处理效果不佳。
当前,空间扩展目标的估计方法可以分为两类:一类是单独估计目标的空间扩展属性,对目标空间进行建模估计。文献[5]使用滤波,结合顶点的方差信息对目标矩形长、宽进行平滑处理;文献[4]对目标使用占栅格方法进行栅格分解,对每一栅格结合目标速度进行预测和相关,最终对目标栅格聚类处理以获得目标的二维扩展属性。另一类方法是将目标状态和空间扩展属性进行联合估计,这类方法充分考虑了目标状态和空间扩展属性的相互作用和影响,比第一类方法考虑更为全面,获得了关于目标的全局估计。文献[1]对雷达点迹合成目标扩展属性使用随机矩阵方法建模,应用Bayes递推滤波器获得目标状态和空间扩展属性的联合递推估计;文献[2][3] 基于[1],在空间属性随机矩阵建模的框架下,在目标扩展属性估计中考虑了传感器的量测点迹在目标的空间位置概率分布,获得了更为准确的点迹雷达跟踪目标的空间属性估计;所不同的是,文献[2]使用多源静态雷达系统数据时将极坐标与笛卡尔坐标的量测误差转换应用到目标的空间扩展属性估计步骤中;文献[3]使用集合论方法获得了对目标模型对称误差鲁棒的目标运动状态空间扩展属性的联合估计,但这类方法对仅适用于点迹雷达目标的跟踪。
本文针对智能驾驶领域,在文献[1]提出的空间扩展目标跟踪的随机矩阵估计框架下,对激光雷达目标的二维空间属性使用随机矩阵建模,利用目标状态和空间扩展属性的联合概率分布,使用Bayes递推估计方法获得了目标状态和空间扩展属性的联合递推方法。仿真表明,目标位置、速度和空间属性估计具有较好的平滑和位置补偿效果。
目标空间扩展属性描述
激光雷达探测目标的空间属性包括包络矩形的长、宽(三维立方体长、宽、高)和方位角,目标的位置为矩形(或立方体)的中心点。因而,目标位置、速度和目标空间尺寸估计相互影响,我们将目标的空间扩展属性作为随机变量进行估计,从而获得目标状态和空间属性的联合验后估计,表达为(1)式:
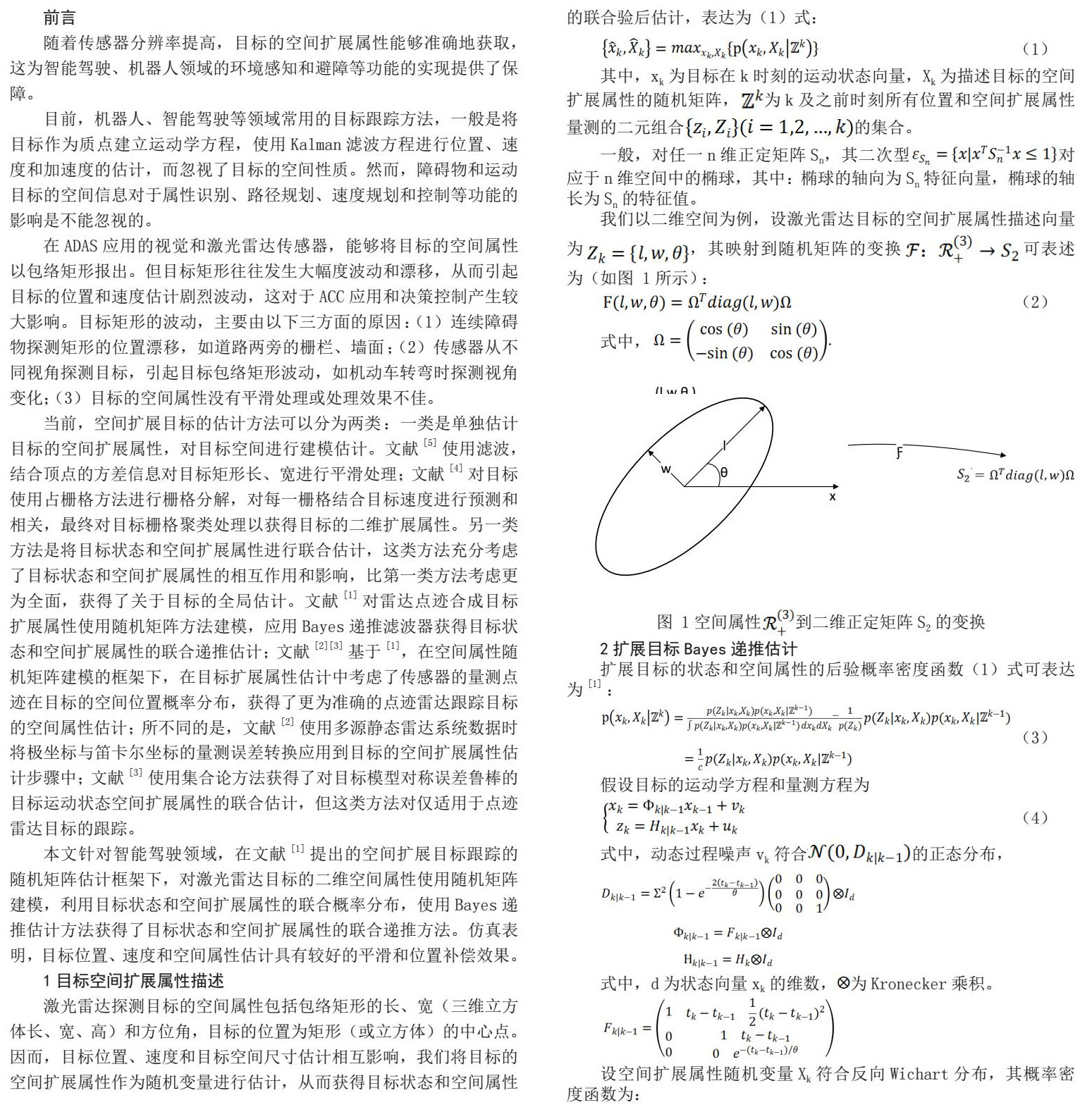
在图 2中,目标x方向的量测位置在时刻40附近和y方向的量测位置在时刻0到20的范围内都发生了剧烈波动。此时,估计目标状态的位置和速度对量测值进行了平滑。
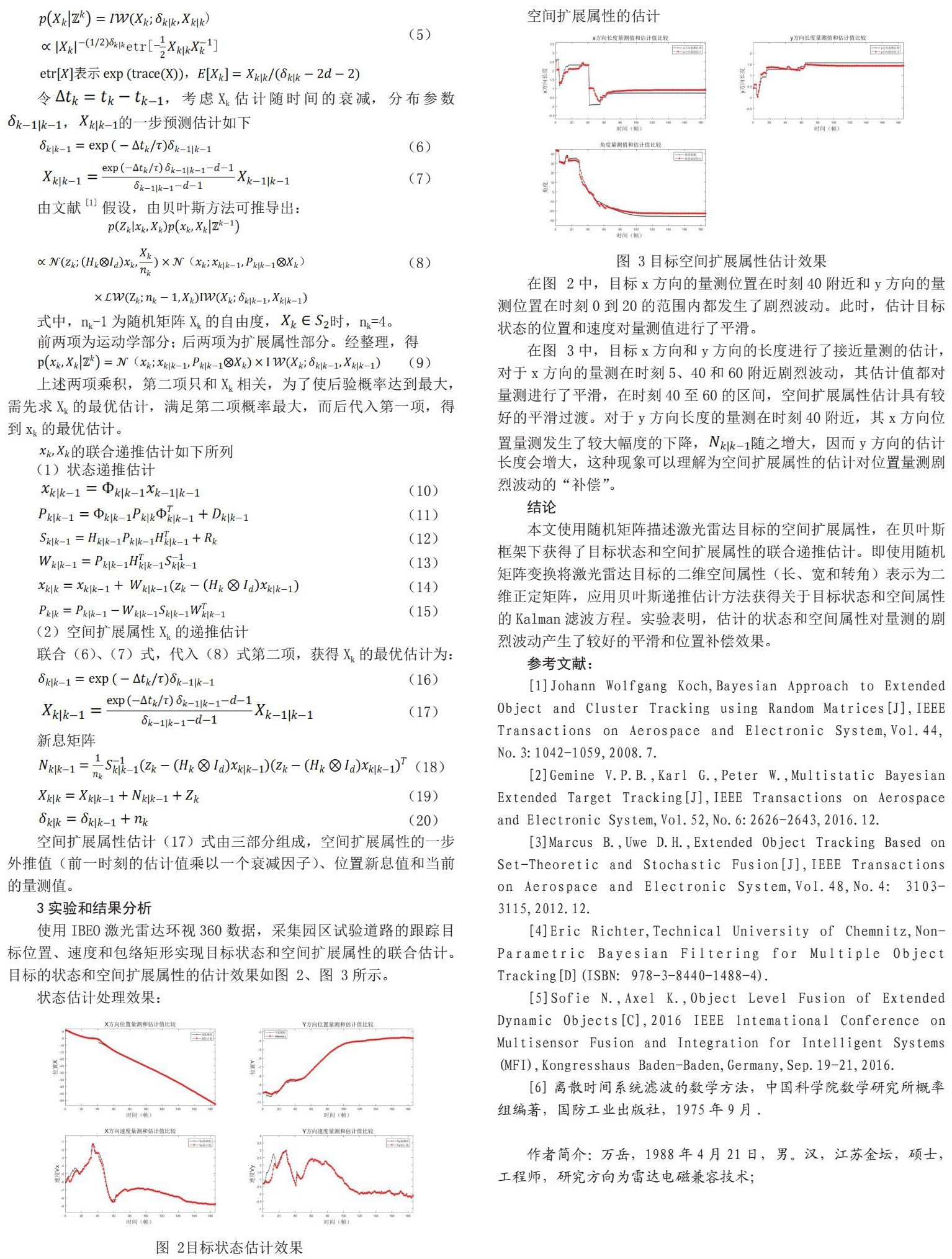
在图 3中,目标x方向和y方向的长度进行了接近量测的估计,对于x方向的量测在时刻5、40和60附近剧烈波动,其估计值都对量测进行了平滑,在时刻40至60的区间,空间扩展属性估计具有较好的平滑过渡。对于y方向长度的量测在时刻40附近,其x方向位置量测发生了较大幅度的下降,N_(k|k-1)随之增大,因而y方向的估计长度会增大,这种现象可以理解为空间扩展属性的估计对位置量测剧烈波动的“补偿”。
结论
本文使用随机矩阵描述激光雷达目标的空间扩展属性,在贝叶斯框架下获得了目标状态和空间扩展属性的联合递推估计。即使用随机矩阵变换将激光雷达目标的二维空间属性(长、宽和转角)表示为二维正定矩阵,应用贝叶斯递推估计方法获得关于目标状态和空间属性的Kalman滤波方程。实验表明,估计的状态和空间属性对量测的剧烈波动产生了较好的平滑和位置补偿效果。
参考文献
[1] Johann Wolfgang Koch, Bayesian Approach to Extended Object and Cluster Tracking using Random Matrices[J], IEEE Transactions on Aerospace and Electronic System,Vol.44, No.3:1042-1059, 2008.7.
[2] Gemine V.P.B., Karl G.,Peter W., Multistatic Bayesian Extended Target Tracking[J], IEEE Transactions on Aerospace and Electronic System,Vol.52, No.6:2626-2643, 2016.12.
[3] Marcus B., Uwe D.H., Extended Object Tracking Based on Set-Theoretic and Stochastic Fusion[J], IEEE Transactions on Aerospace and Electronic System,Vol.48, No.4: 3103-3115, 2012.12.
[4] Eric Richter,Technical University of Chemnitz, Non-Parametric Bayesian Filtering for Multiple Object Tracking[D] (ISBN: 978-3-8440-1488-4).
[5] Sofie N., Axel K., Object Level Fusion of Extended Dynamic Objects[C], 2016 IEEE lntemational Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Kongresshaus Baden-Baden, Germany, Sep. 19-21, 2016.
[6]离散时间系统滤波的数学方法,中国科学院数学研究所概率组编著,国防工业出版社,1975年9月.
作者简介:万岳,1988年4月21日,男。汉,江苏金坛,硕士,工程师,研究方向为雷达电磁兼容技术;

 京公网安备 11011302003690号
京公网安备 11011302003690号


