



- 收藏
- 加入书签

赫利俄斯军用补给无人机研究报告
 打开文本图片集
打开文本图片集

摘 要
随着21世纪的科技飞速发展,各国的军备力量也在大幅度的提升。其中对于空中战场主动权的竞争也就成了各国空军装备的比武场,除了常规的有人战斗机之外,还有大量的无人战斗机成为了空中战场不可缺少的重要战斗量。军事是无人机的主要应用领域,军用无人机占比超过70%。军事领域,无人机具有用途多、生存能力强、作战环境要求低等优点,是信息战和网络中心战的重要装备。
无人机在军事领域的成功应用,也揭开了以智能化远程攻击武器为主导的非接触战争的新篇章。目前军用军用无人机的典型用途包括模拟飞行器、情报侦察、军事打击、信息对抗、通信中继、空中预警等。而这飞行器中并没有一种空中弹药补给的军用无人机。所以我们提出这样的补给无人机的设想。
本文对战争场景下军用补给无人机执行空中弹药补给任务进行了作战仿真研究。采用Catia product软件对飞行器的整体造型进行设计和3D模型建立,再通过ANSYS和 Fluent软件对飞行的飞行升力和空中弹药补给的安全系数进行了初步的研究,最后通过Catia Composer软件对应用场景进行了演示视频的制作。研究步骤如下所示
目 录
第一章 研究背景
1.1国内研究现状
1.1.1国内研究背景
1.1.2总体现状
1.2 本项目设想
第二章 研究过程
2.1研究基础(整体模型数据)
2.1.1整体模型设计
2.1.2.内部结构设计
2.2研究过程及结论
2.2.1研究方向
2.2.2研究结论
第三章研究趋势设想
3.1深度研究设想
3.2拓展研究设想
应用场景
总结与期望
参考文献
第一章 研究背景
1.1国内研究现状
1.1.1国内研究背景
我国的军事实力应该进行大幅度的提升,国际军事装备竞争对于我国的军事工业的一些新型装备有个一些新的想法,希望研究一些更加适应现代化战争的军事装备。现代高技术战争的作战特色,唯物主义认为, 技术决定战术。社会科技、生产和武器装备的发展, 是影响作战方法变革、战争形态变化的最富活力的因素。
从作战角度考察, 主要具有以下新特点:高技术优势的一方易于达成战争的突然性,战争的立体性空前加大战争的规模和进程具有一定的可控性空袭和反空袭在战争中的地位和作用日显突出,电子战成为决定战争胜负的关键,导弹战成了重要的作战样式战争对经济和后勤保障的依赖性空前增大。因此,对无人机在军事邻域各个方面发挥的作用进行深入探索和广泛挖掘潜能,正成为当前信息化战争的重点。
1.1.2总体现状
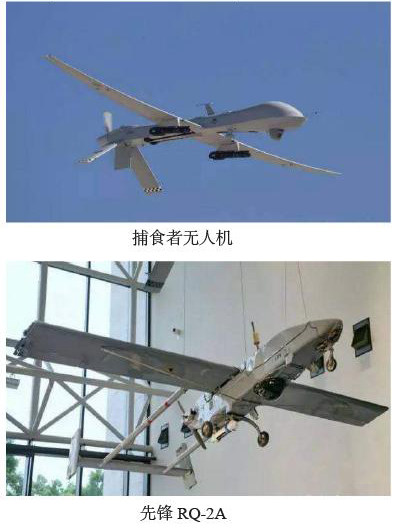
目前,对无人机在军事邻域各个方面发挥的作用进行深入探索和广泛挖掘潜能,正成为当前信息化战争的重点。目前军事上的补给无人机发展状况并不是非常的完善,从国外和国内已有的军用补给无人机来看,现在的军用补给无人机基本上都是四旋翼无人机,使其带有军用弹药和后勤物资对于军事的地面作战部队进行补给,而且补给量较少。或者补给无人机往往都是对于空战战斗机进行加油补给的空中加油机,目前没有一款补给无人机可以在战斗机战斗过程中进行弹药补给的无人机。同时,作为军备超级大国的美国和俄罗斯都没有对于这样的空中导弹补给提出明确想法,目前这些超级军备大国任然将无人机作为侦查和攻击机来使用。
1.2 本项目设想
针对这一现象,提出一种军用补给无人机的想发:运用低速低空飞行的固定翼无人携带导弹在空中进行补给,使战争的时间轴缩短加快打击效率,加快攻击频率掌握空战主动权。同时设想,在完成补给之后能不能辅助战斗机作战,将飞机的飞行模式转变为高空高速模式,进行侦查,和信号干扰。要研究以空中弹药补给为主要功能,并以侦查和干扰为次要功能的辅助补给无人机,在战争中形成一套完善的补给,侦查,打击,掌握战争的绝对主动权,取得压倒性的胜利。
第二章 研究过程
2.1研究基础(整体模型数据)
2.1.1整体模型设计:
通过CATIA Product 软件,先制作出基于基础的参数制作出机体,机翼,尾翼,发动机和起落架等重要部件,再讲机身和机翼尾翼各个部分进行组装。然后根据空气动力学方程计算出合适的升力,并修改飞机的翼展和长度再对飞机的整体大小进行改装,最终确定带有鲨鳍小翼,翼展比为2.89的无尾翼,中单翼式战斗机,在此基础上设计导弹支架,和机械臂。
2.1.2.内部结构设计:
为了使无人机携带导弹的装置能够稳定安全的携带导弹,我们对无人机携带导弹的装置通过solid works软件进行了较细致的设计,使得无人机与导弹的连接装置形成了双层锁死结构,并且无人机内置的红外感应装置在与战斗机靠近时自动识别战斗机上预先设置好的位置对接后进行导弹安装,同时后期经过多次的深化学习有望实现无人机系统的智能对接,即在各种不同位置,多种情况下的对接。
该无人机目前已经完成初级研究的阶段,该军用无人机机体和内部结构的完整设计,并且通过通过CATIA软件,建立了3D模型。军用无人机的所有基本部件都已完成设计。飞机整体模型,以及飞行器的导弹装载构建的模型如下图所示。
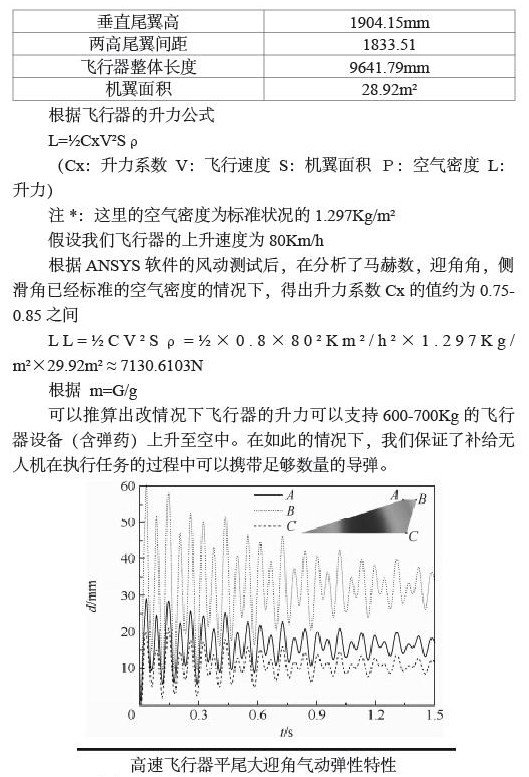
在经过讨论和研究后,最后建立3D模型,飞行器模型指数如下表所示:
根据飞行器的升力公式
L=½CxV²Sρ
(Cx:升力系数 V:飞行速度 S:机翼面积 Ρ:空气密度 L:升力)
注*:这里的空气密度为标准状况的1.297Kg/m²
假设我们飞行器的上升速度为80Km/h
根据ANSYS软件的风动测试后,在分析了马赫数,迎角角,侧滑角已经标准的空气密度的情况下,得出升力系数Cx的值约为0.75-0.85之间
LL=½CV²Sρ=½×0.8×80²Km²/h²×1.297Kg/m²×29.92m²≈7130.6103N
根据 m=G/g
可以推算出改情况下飞行器的升力可以支持600-700Kg的飞行器设备(含弹药)上升至空中。在如此的情况下,我们保证了补给无人机在执行任务的过程中可以携带足够数量的导弹。
2.2研究过程及结论
2.2.1研究方向
本次研究中主要研究在正常的气流情况下,无人机和有人战斗机进行空中导弹补给的气流模拟。本项目重点会关注到无人机与战斗机之间的气流变化规律,模拟在各种气流环境中无人机与有人战斗机空中对接的气流分布,以保证无人机空中补给的安全性。最重要的是关注两架飞行器之间的气流活动,对于飞机安全平稳飞行的影响,已经能否实现在保证完全的情况下,尽可能快速的完成导弹空中补给工作。所以本项目研究方向主要是一下的两个研究方向:
研究方向1:将两架飞行器的飞行距离缩短至最近,并通过ANSYS软件测绘并模拟飞行器之间的气流的活动规律和潜在的气流不规则运动,运用空气动力学的知识去计算演算气体流动的相关流速,气压,方向等因素。判断在两架飞行器极近距离下完成补给工作安全性。
研究方向2:在无人机的机身上假装机械臂部件,在空中补给的过程中,保证足够安全距离的情况下,通过机械臂来完成导弹传送装载的过程,也是同样运用空气动力学的知识,计算流速,气压,方向等因素,以保证机械臂的工作强度,从而完成空中导弹补给安全进行。
2.2.2研究结论
通过ANSYS软件提风洞的测试,后我们会发现两架飞行器在相互接近的情况下由于伯努利原理,飞行器与飞行器之间的气流流速会急剧上升,也就是说飞行器之间的压强也会随之减少,就回形成一个相互吸引的趋势,结果导致飞行器的相撞,所以我们要确定一个安全距离,以防止伯努利原理在飞行器进行导弹补给的过程发生。这样我们团队就排除研究方向1中,采用极近距离的情况下进行导弹的空中补给。
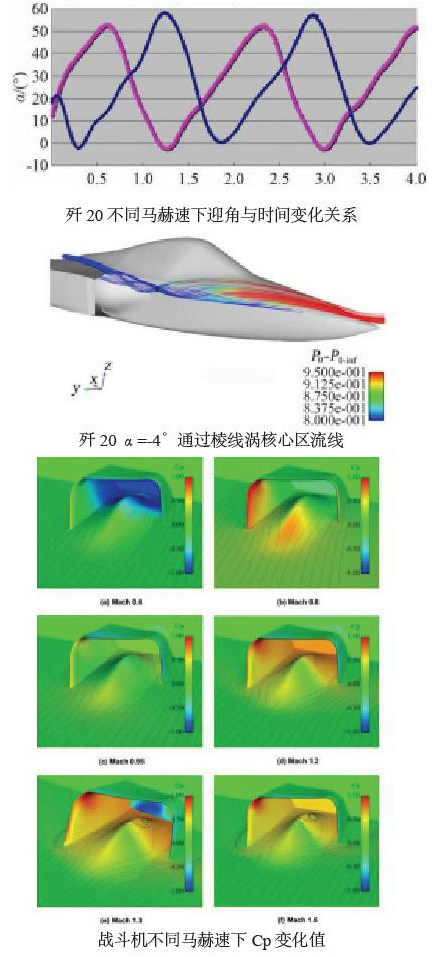
在ANSYS软件中,我们测得该军用补给无人机模型在标准情况下,升力系数在0.75-0.85之间,而我们补给的对象为歼20。根据著名空军装备专家傅前哨的研究报告,歼20采用了基于涡流控制技术的升力体机身、鸭翼、边条、机翼、后机身边条、外倾双腹鳍和外倾全动双垂尾的一体化非常规气动布局,其控制和受控涡流至少包含机头鳍角涡流、进气道鳍角涡流、鸭翼涡流、边条涡流和机翼前缘涡襟翼涡流等——复杂多涡系的互相耦合,若设计水平高,控制得当,将产生巨大的升力收益和减阻效果(显著超过使用升力体机身、边条翼、鸭翼三者中一种或两种时)!其升力系数不小于2.1-2.2,世界第一。而在同等设计水平时,鸭式布局的阻力系数比常规布局小10%左右,同时歼20机身长细比较大,截面积较小,也利于减阻。我们可以保证两架飞行器在平行飞行时有着足够的升力。
由于飞行器产生的涡流,会对正常的气体运动规律产生影响,那么我们就要假设我们的补给过程是在一个低速的过程中实现的,根据软件分析的数据我们得出飞行器的安全距离应该保持在8.73米以上。所以我们设计了一个可以自由伸缩的机械臂作为导弹传送搭载的媒介,导弹通过长长的机械臂的运作,将导弹从无人机的背部搭载至战斗机的导弹挂钩槽位上。
第三章研究趋势设想
3.1深度研究设想
接下来的研究过程我们的重点将会关注点在各种空气流动情况下,飞行器周围的气流变化,而且我们数学模型建立飞行飞行器之间的气动规律,保证以最安全的方式完成战斗机导弹空中补给的任务。具体来说我们实现以下三个进程:
进程1:
通过ANSYS软件,优化改善该军用补给无人机的整体气动布局。将其在不同的飞行环境,飞行姿态,飞行速度等条件下周围的气体进行一个数据化的处理,得到气体的规律变化方程,引用此气动变化规律对飞行器的进行优化升级以保证更安全的飞行状态。
进程2:
通过ANSYS软件进一步了解两架飞行器的平行飞行时的涡流运动规律,计算并推算的涡流的运动规律,完成补给机构的优化升级,并对已有的补给方式进行深度的研究,研究在不规则气流中该结构对气流影响的深度作用。
进程3:
设想是否有更好的方式来完成这一导弹补给过程,并且在已有的气动规律上进行验证可行性,推导出多种补给方式,从而斟酌最安全最高效的补给方式。
3.2拓展研究设想
在飞机前段增加智能眼系统,通过labview系统所支持,在高机动性的加持下,在完成补给后,可以侦查打击区域的敌方武力分布,并将侦查信息实时传送到战斗机,让战斗机驾驶员对敌方的目标分布有一个即时的了解。完成上阶段后,还将研究在无人机内部增加电子干扰系统,对目标区域内的电子设备进行干扰,是其侦查设备和信息传达设备瘫痪。
提出设想,运用神经网络技术,将单一无人机上升到无人机群的高度,各个无人机相互组合,以一定的间距和真性飞行,形成一个无人机群,再加之其本身的信号屏蔽能力,形成一个信息屏蔽罩,从而使打击区域内,大规模的雷达系统和通讯系统瘫痪,甚至可以时对方的攻击单位失效,从而辅助战斗机完成打击。并且通过研究相关资料,验证该设想的可行性。
应用场景
本项目军用补给无人机在现代战争中将会起到非常关键的作用,对此设计了一个具体的应用场景。假设这是战争中的一种情况,我方已经派出战斗机对于敌方基地进行打击,目前我方战斗机已经发射了所有的导弹,并且对敌方的部分重要设施实施了打击,但是还有几个雷达站,需要进行打击,可是此时战斗机没有了弹药,但是战斗机再返航补给需要大量时间,所以派出无人机,对这几架战斗机进行补给,飞机装载了,大量的导弹,及时飞往战斗机的所在位置,并且在巡航的过程中,等待我方战斗机撤离至安全区域,在无人机和战斗机相遇后,两者减慢速度,达到一个低空低速的飞行状态,无人机将装载的弹药运送至战斗机的弹药装载架上,完成一次充足的补给。
总结与期望
总结
全对军用补给无人机进行了初步的设想,先对该飞行器进行了整体模型的构建,运用工程建模软件对外部气动布局和内部构件的设计,此外运用气动力测试软件对飞行器的飞行能力进行验证,之后通过获取战斗机的数据来研究飞行器与飞行器相互平行飞行时的气体运动规律,简单总结了在研究过程的研究方向,通过数据分析比对,选择出最合适且最安全的空中补给方式,最后提出设想,在下一步的研究中将会对飞行器与飞行器之间的气流进行更深度的研究。
不足与期望
由于本团队的所学知识有限,研究水平有限,所有提出的设想与验证的方案全是在理想化的气体环境下进行,在很多复杂的不规律的气体环境中给飞行器的工作能力并没有得到完全的认证,所以目前的最好的设想并不是最好的选择。
其次,由于该无人机空中补给的过程并没有先例可以研究,这一方面的探索研究过程基本是依靠自主的猜想,而且相关的研究资料文献少之又少,所以探索难度很大,也许有些过程的推导是错误的。并且更重要的是该项目的研究对象是军用设备,军用设备的数据是无法掌握的,我们没有权限去获取,许多关于战斗机的飞行参数只是通过专家给出的数据进行推断得出,所以最后的数据都是理论化的结果,可能还需要更加深入思考和推算。
总而言之,我们希望通过相关的教授或专家的指导对我们已经研究的方案进行更加深入化的推敲,我们也会更加深入学习相关知识来实现该飞行器更深一步的研究。而且期望去学习更好的软件来完成该军用补给无人机的仿真设计。
参考文献:
[1]Marius Niculescu.Lateral Track control Law for A erosonde UAV[R] 2001 AIAA-2001-2016
[2]Joel M Grasmeyer.development of the black Widow Micro Air Vehicle[R],2011 AIAA-2001-0127
[3] DANNY GERIS Aerodynamik Warum fliegt ein Fluzeug?Grundlag Geschichte und Entwicklung [C] deutsch Technische Universität Dresden,2013
[4]KARLS NI KIBildung entwicklung [R],Deutsch Technische Universität Dresden,
[5]郦正能 程小全 飞机部件与系统设计[M] 北京 北京航空航天大学出版,2021
[6]周玉兰等 世界无人机大全[R], 北京 航空工业出版社,2004
[7]时捷 无人机与无人战斗机最终将加入空战机群行列[J] 无人机,2003
[8]易中,吴萱,周丽珍 低速空气动力学[C] 北京 冶金工业出版社,2005
王强. 世界军用无人机图鉴[M]. 第1版.北京:人民邮电出版社,2014.136-147.
[9]乔恩 A Mathematical Introduction to Fluid Mechanics[A] America Springer,
1993
[10]王和平,杨保华,陈江宁 现代飞行器设计理论与技术[M] 西安 西北工业大学出版社,2013
[11]章健 航空概论[M] 北京 国防工业出版社,2010
[12]陈锡辉 张银鸿LabVIEW8.2程序设计从入门到精通[M] 北京 清华大学出版社,2007
[13]谢辉 无人机的应用基础[M] 西安 西北工业大学出版社,2019
[14]于坤林 陈文贵 无人机机构与系统[M] 西安 西北工业大学出版社,2016
[15] 陈都, 孟秀云. 基于粒子群算法的无人机航迹规划与仿真研究[C]. 中国自动化学会系统仿真专业委员会、 中国仿真学会仿真技术应用专业委员会、 中国科学技术大学. 第二十届中国系统仿真技术及其应用
[16]学术年会论文集(20th CCSSTA 2019). 中国自动化学会系统仿真专业委员会、 中国仿真学会仿真技术应用专业委员会、 中国科学技术大学: 中国自动化学会系统仿真专业委员会, 2019:580-584
[17]甄云卉, 路平. 无人机相关技术与发展趋势[J]. 兵工自动化, 2009, 28(01):14-16
[18]魏瑞轩,李学仁. 先进无人机系统与作战运用[M]. 第1版. 北京:国防工业出版社,2014.
[19]陈黎. 军用无人机技术的发展现状及未来趋势[J]. 航空科学技术,2013,(2):11-14.
[20]黄柯棣,等. 军事分析仿真评估系统关键技术综述[J]. 系统仿真学报, 2012,24(12):2439-2447.
[21]唐忠,薛永奎,刘丽. 美军作战仿真系统综述[J]. 航天电子对抗,2014, 30(4):45-49.
[22]邓红艳,等. 作战仿真理论与实践[M]. 北京:国防工业出版社,2013.
[23]金伟新,肖田元. 基于复杂系统理论的信息化战争体系对抗仿真[J]. 系统仿真学报,2010,22(10):2435-2445.
作者简介 曹宇辰 性别 男 籍贯上海 出生年月2001 10 学历本科 研究方向,无人机

 京公网安备 11011302003690号
京公网安备 11011302003690号


