



- 收藏
- 加入书签

航电系统综合诊断数据采集系统设计与实现
 打开文本图片集
打开文本图片集
摘要:针对航电系统故障诊断可利用的参数量单一、故障检测率和故障隔离率不高等问题,本文基于ARM嵌入式在μC/OS-III环境下完成了对故障诊断数据采集系统的设计,采集系统可以获取多个航电系统的性能参数,运用综合诊断方法对参数进行处理,提高了航电系统的故障检测率和隔离率,提升了航电系统综合保障能力。
关键字:数据采集;航电系统;信号调理;故障诊断
中图分类号:TN74 文献标识码:A
Abstract: Aiming at the problems of single parameter quantity available for fault diagnosis of avionics system, low fault detection rate and fault isolation rate,based on ARM embedded, the design of fault diagnosis data acquisition system is completed in μC/OS-III environment. The acquisition system can obtain the performance parameters of multiple avionics systems, and use the comprehensive diagnosis method to process the parameters, which improves the fault detection rate and isolation rate of the avionics system, and improves the comprehensive support capability of the avionics system.
Keywords: data acquisition; avionics system; signal processing; fault diagnosis
0 引言
随着电子技术的发展,航电系统逐渐向联合式、综合式发展,对航电系统故障的诊断,一直是部队地面维护的难题。目前,三、四代飞机航电系统主要通过BIT(机内自检)实现飞机的故障检测,但是BIT只能测试机载设备某项功能是否正常或故障,没有具体性能参数测试数据,没有考虑故障的相互交联、影响和传播等因素[1],因此航电系统都存在虚警率高和重测合格率低,故障检测率和隔离率低等问题[2]。因此迫切需要研究新的综合诊断技术和方法,通过对航电系统多个性能参数的测试,将这些测试参数进行融合、推理,从而降低或消除系统虚警率,实现对故障检测率和隔离率的提升,完成航电系统综合诊断依赖于完善的测试系统[3]。本文针对三代机航电系统的特点,设计了以ARM为核心的数据采集系统,实现对航电系统主要性能参数的测试,基于获取的测试参数数据,运用综合诊断方法对航电系统故障进行诊断和推理,实现故障的诊断和推理,实现了将系统综合诊断理论方法应用在复杂航电系统故障诊断中去[4]。
1 系统总体设计
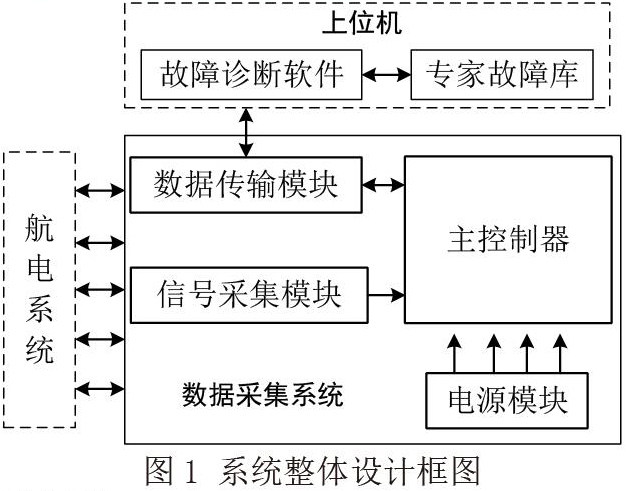
数据采集系统由硬件模块和软件模块两部分组成。系统硬件模块部分主要是由主控制器、信号采集模块、数据传输模块以及电源模块等组成;系统软件部分主要是由下位机(数据采集系统)控制程序以及上位机程序组成,下位机控制程序主要由多任务模块、数据采集、总线通信、系统功耗调理等程序组成,上位机程序由故障诊断程序和专家故障库构成。数据采集系统是以STM32为核心构建的,与上位机采用RS422总线和CAN总线进行通信,系统采用μC/OS-III操作系统作为主控系统。采集系统的整体框图如图1所示。
2 系统硬件设计
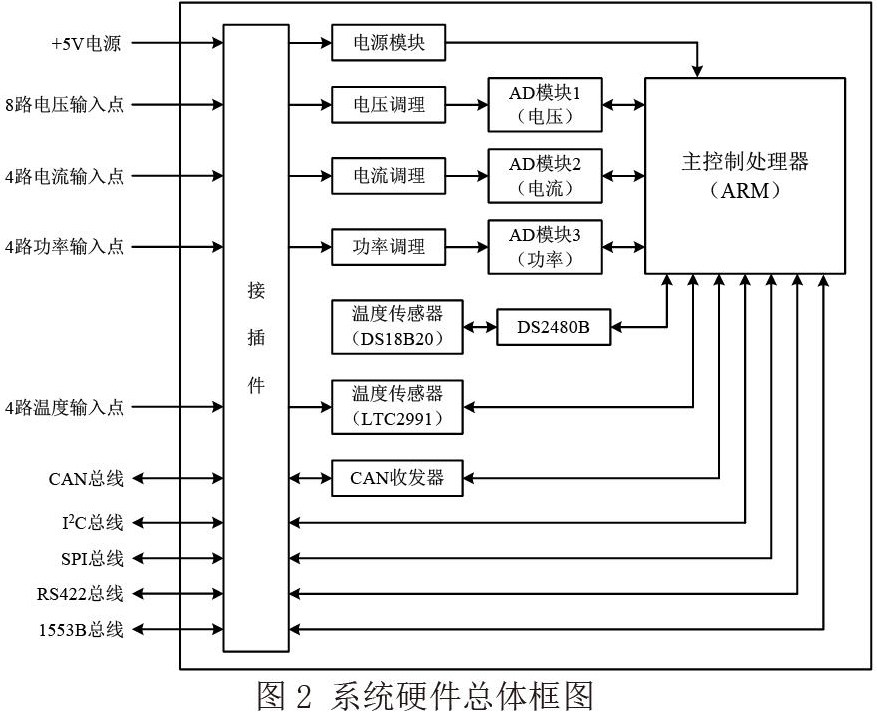
数据采集系统硬件主要由主控模块、模拟信号采集模块、数据通信模块、温度采集模块、数据存储模块以及电源模块组成。系统硬件总体框图如2所示。
主控制处理器主要完成信号的采集、数据处理和通信控制,STM32F103芯片虽内置ADC模块,但ADC采样通道不够用,因此需要外扩ADC芯片LTC1857[5]。STM32F103芯片本身内存不是很大,由于需要存储的数据较大,因此需要外扩存储芯片W25Q128。系统采用5V电压供电,5V电压经DC/DC模块转换为3.3V、2.5V、-5V电压,为其他电路模块供电。电流、电压、功率参数主要是通过ADC进行采集,温度是通过温度传感器获取,采集后的数据缓存在存储芯片中,根据需要,将数据从存储芯片中读出,通过CAN总线上传到上位机。
2.1 主控制器电路设计
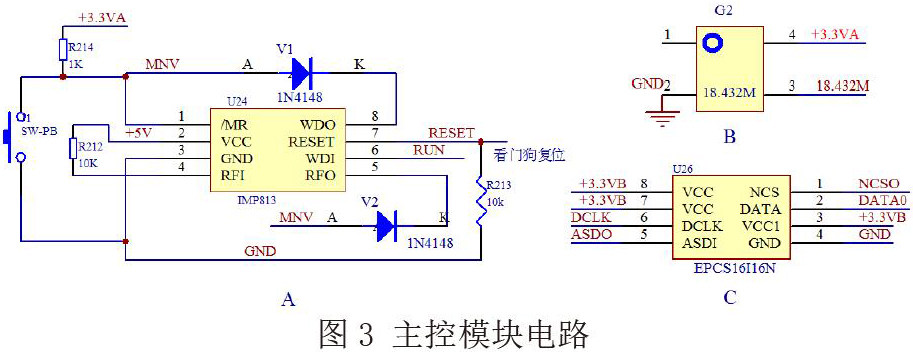
主控制处理器要实现其功能,需要为其构建最小的工作系统,系统主要由时钟电路、数据存储电路、看门狗电路以及JTAG调试接口电路组成[6]。图3(A)为系统看门狗电路,图3(B)为系统时钟电路,图3(C)为系统存储电路。
系统采用IMP813芯片构建了看门狗电路,当STM32主控制器内部程序出现异常时,看门狗电路可对系统进行复位。系统采用外部时钟信号作为系统时钟信号源,由晶体振荡电路产生18.432MHz的时钟信号,采用18.432MHz的时钟主要是为了方便串行通信时波特率的计算,STM32内部通过锁相环将时钟信号倍频至92.16MHz。STM32内部自带的Flash存储空间有限,因此系统选用EPCS16I16N FLASH芯片作为外扩存储器,EPCS16I16N内存为16M字节,通过SPI总线和STM32进行通信,主要用于采集数据的存储。JTAG接口负责测试程序的下载和调试。
2.2 信号调理与采集电路设计
2.2.1 信号调理电路
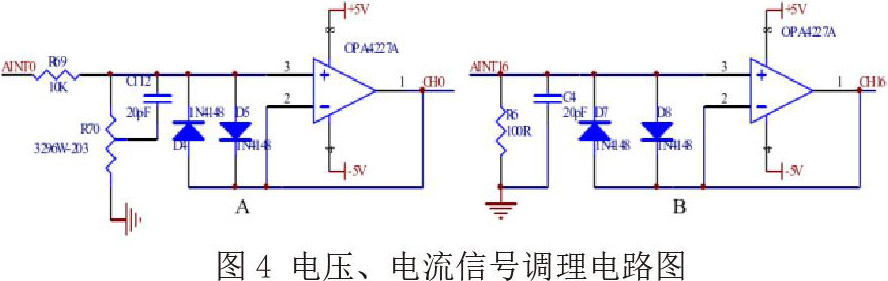
系统采集的电压范围为-5V~+5V,电流范围为0~50mA,电压调理通过电阻分压扩大测量范围,电流调理通过分压法最终转换为电压信号,信号调理电路如图4所示。
图4(A)为电压信号调理电路图,由前端分压电路和后端跟随电路两部分组成。R69、R70构成电阻分压电路,电阻取值要比较合理,根据电压、电阻和功率之间的计算关系,R69选用材质为金属膜,阻值为10KΩ的电阻,R70选用阻值为20KΩ的精密电位器。电路中电容C112的作用是吸收一些高频干扰,降低信号的失真。电路中二级管的作用是对后级的电压跟随器进行保护,当电位器损坏时,前端分压电路就不能进行正常分压,有可能导致后面的运放烧坏,因此加一个二极管保护电路。为了解决前端分压电路与ADC电路之间的阻抗匹配问题,在二者之间加入缓冲电路,系统选用运放芯片OPA4227构建一个电压跟随电路,以降低前级的输出阻抗。
图4(B)为电流信号调理电路图。电路中串接采样电阻R6,电流最终转换为测采样电阻两端的电压差值,即I=U差/R,输入电流范围为0~50mA,经过电阻R6转换为电压,转换后的电压范围为0~5V。电流调理电路后端的作用和电压调理电路的作用一样,这里就不做过多赘述。
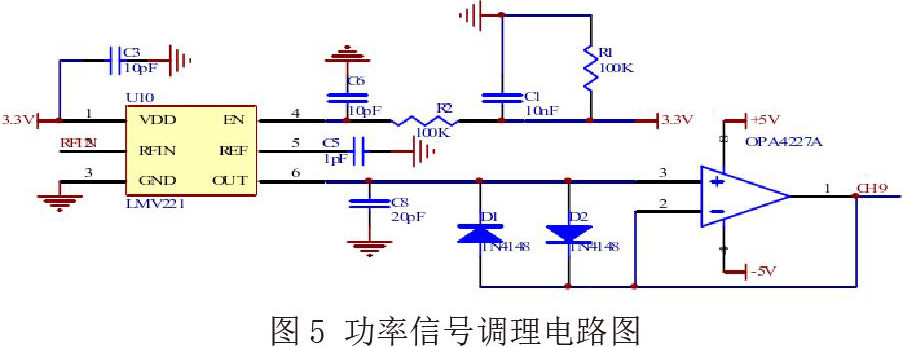
系统除了采集电压、电流信号外还需要采集射频功率信号,射频信号频率测量范围为50MHz~3.5GHz,功率范围为-45dBm~-5dBm。系统是通过射频功率检波器来对射频功率进行测量的,选用LMV221作为功率调理芯片,功率信号调理电路如图5所示。
射频功率检波器的特点是输出电压与射频输入功率成正比,只要得到其输出电压,就可计算得到其输入功率,输出电压和输入功率的线性关系如下公式所示;
Uout=K(Pin-b)
其中K为斜率,b为截距,Uout为输出电压,Pin为输入功率,其中K、b的值可通过查阅LMV221数据手册确定[7]。
射频信号从RFIN脚输入,转换后得到的电压从OUT引脚输出,输出电压范围为0.3V~2V,因此不需要再进行分压处理,可直接与后面的保护电路和电压跟随电路相连。
2.2.2 AD采样电路
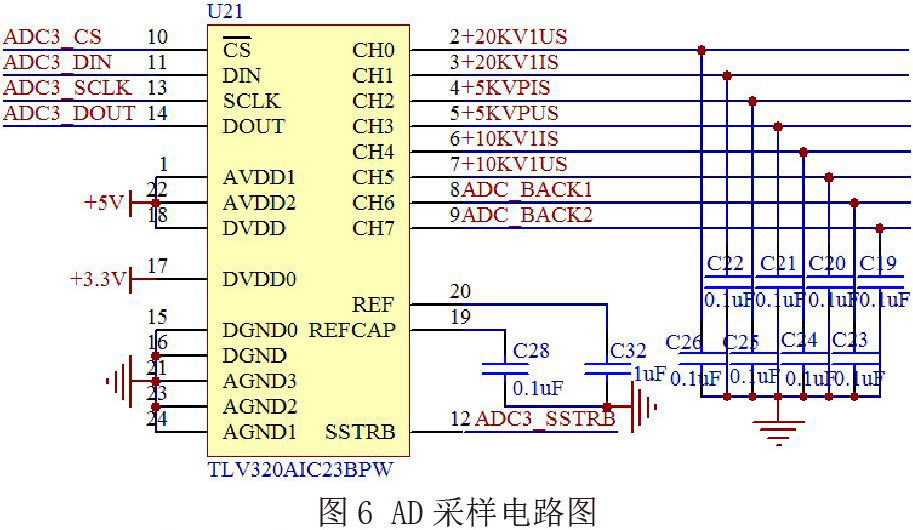
系统选用TLV320AIC23BPW芯片作为ADC采样芯片,TLV320AIC23BPW芯片每片有8个采集通道,为满足系统需求,需要3片该型号ADC,分别作为电压采集、电流采集、功率采集之用,电压、电流、功率采集各占用一片ADC,ADC芯片与微控制处理器通过SPI总线相连,三片ADC只占用微控制处理器一个SPI接口,控制处理器通过片选信号(ADC3_CS)来控制三片ADC芯片工作与关断[8]。AD转换电路图如图6所示。
ADC每路采集通道都加一个0.1μF的电容(C19~C26),用来降低耦合至输入通道的宽带噪声。C28、C32为退耦电容,用来稳定参考电压,以提高电压测量的精度和稳定性。电压采集与功率采集配置为单端采集模式,电流采集配置为差分模式,对于-5V~5V电压信号输入范围,通过SPI总线将ADC芯片输入范围配置为-5V~5V,对于0.3V~2V和0~5V的电压输入范围,则通过SPI总线将ADC的输入范围设置为0~5V。
2.3 CAN总线电路设计
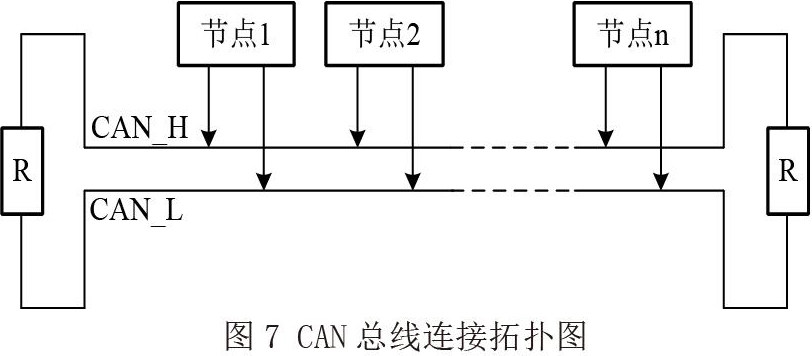
航电系统有多个模块,每个模块需配备一个数据采集子卡以实现对多个电路模块的健康管理,通过对CAN总线的了解,一条CAN总线上可以挂接多个CAN通信设备,CAN总线的通信方式有点类似广播的形式,当总线上的一个模块发送消息时,挂载在CAN总线上的其他模块都能接收到消息,而通过一些具体消息发送接收方式可以对特定模块进行消息传递[9]。CAN总线连接拓扑图如图7所示。
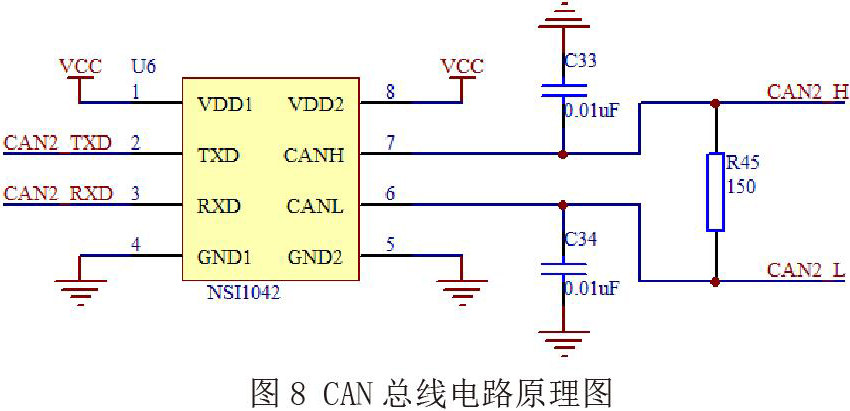
CAN收发器选用NCA1042芯片,为带隔离的CAN收发器。NCA1042只负责报文收发,而CAN控制器控制模块集成在STM32芯片内,所以硬件连接上只需将芯片上的TXD和RXD引脚与控制芯片的CAN2_TXD,CAN2_RXD相连即可,另外在总线上加一个匹配电阻R,阻值为150Ω,CAN2_H和CAN2_L端应加一个0.01μF的小电容,用来滤除CAN总线上的高频干扰,降低电磁辐射。图8为采集子卡上CAN总线电路设计原理图。
3 系统软件设计
3.1 数据采集系统软件总体设计
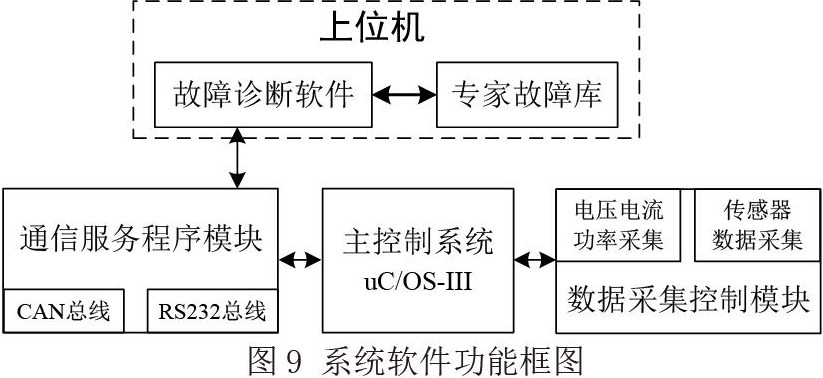
整个系统软件的功能框架如图9所示。
数据采集系统的软件设计主要包括上位机故障诊断软件和专家故障库,下位机的数据采集控制模块以及通讯服务程序模块[10]。故障诊断软件主要包括专家数据库连接、总线通信、测试信息显示、模块信息实时监测和故障诊断等五个功能模块。数据采集控制模块主要包括电压电流功率采集和传感器数据采集模块,通讯服务程序模块主要包括CAN总线和RS232总线数据传输模块。为了增强本系统的可操控性和扩展性,在主控芯片STM32植入了μC/OS-III操作系统,μC/OS-III为整个采集系统软件提供了运行平台,其负责各采集任务管理和数据通信,同时对系统内存进行管理;数据采集控制模块完成对航电设备性能参数的测试,并将测试数据存储到存储器;通讯服务程序模块负责上位机和下位机间的通信,同时将存储器内存储的测试数据上传给上位机。
3.2 多任务模块设计
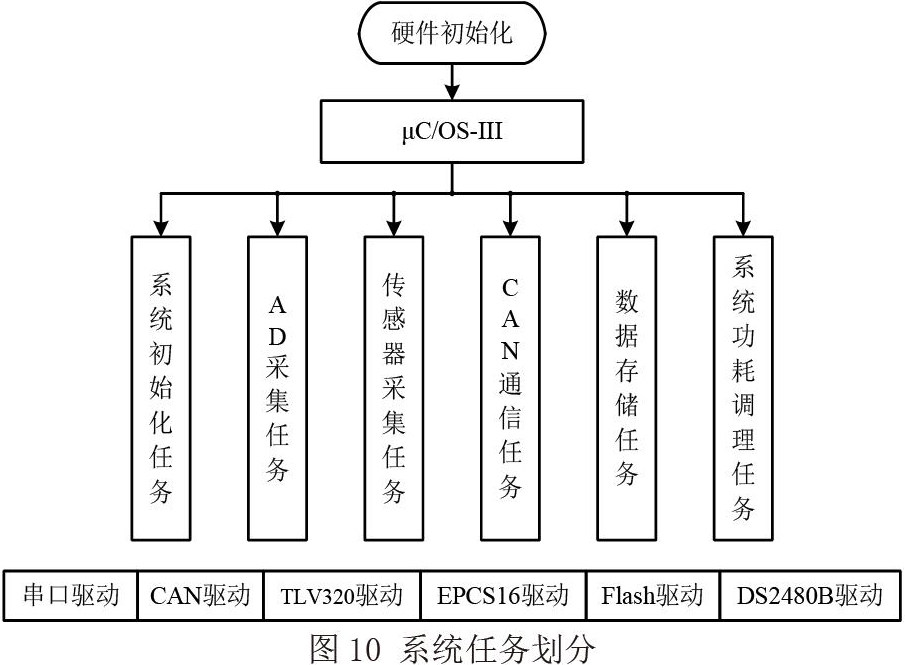
为了实现多任务管理,增强系统的可操作性和可控性,给ARM芯片植入μC/OS-III操作系统。μC/OS-III为系统各任务的运行提供平台,保证各任务运行的实时性,为各任务间通信提供通信机制,减少任务间的耦合,使得软件结构更具条理性。
本系统主要任务包括系统初始化任务、AD采集任务、温度传感器采集任务、振动传感器采集任务、CAN通信任务、系统功耗调理任务、数据存储任务,图10为系统的各任务划分。系统底层驱动程序完成了对系统硬件的驱动和控制,各任务只需调用相应的驱动即能完成相应的功能。
4 系统性能测试
在对系统硬件和软件调试完毕后就要对系统进行性能测试了,测试内容包括电流、电压、功率、温度、功耗、电源。
4.1 电压测试
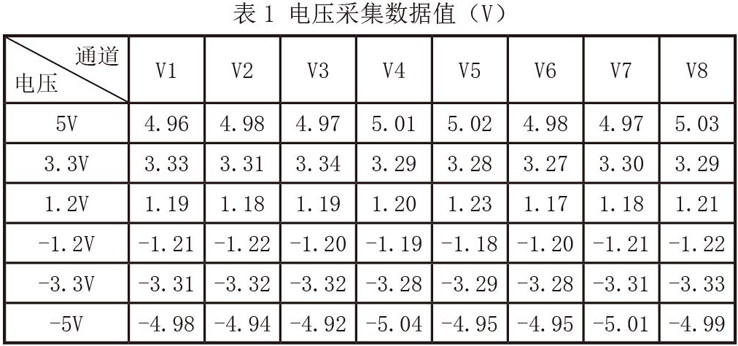
电压测试将8个通道依次连接到标准电压5V、3.3V、1.2V、-1.2V、-3.3V、-5V的信号点上,电压采集的数据如表1。
通过表1测量结果来看,8个电压输入通道实现了正、负电压的测量,通过对测量数据分析可以知道,8个通道的采集误差都在±5%以内,符合系统设计指标要求。
4.2 电流测试
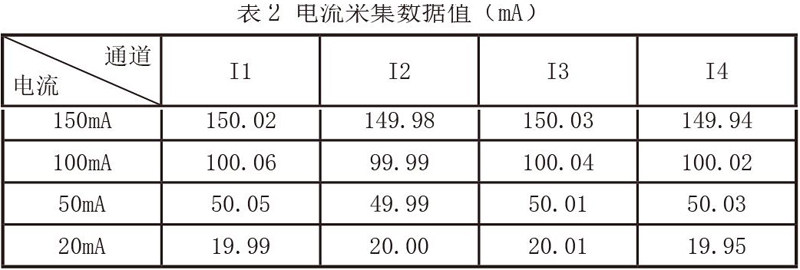
电流测试将4个电流输入通道依次连接到标准电流150mA、100mA、50mA、20mA电流,电流采集的数据如表2。
通过表2测量结果来看,4个电流输入通道实现了150mA、100mA、50mA、20mA电流的测量,通过对电流测量数据分析可以知道,4个通道的采集误差都在±5%以内,符合系统设计指标要求。
4.3 功率测试
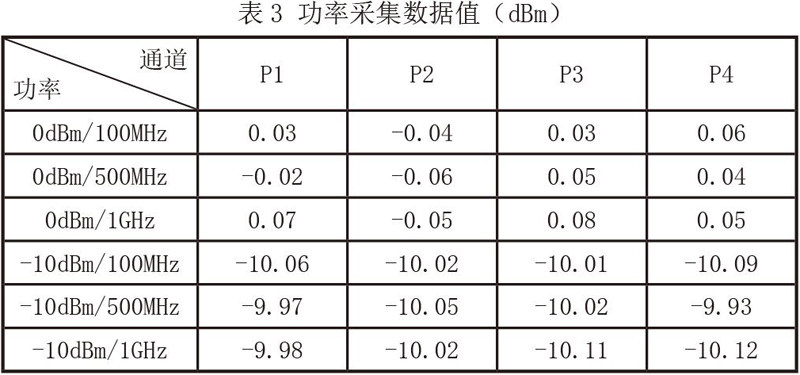
功率测试是每个单独通道单独测试的,源信号是相同的,将功率采集通道连接到射频功率检测器的输出端,采集器输出端输出电压,并将电压进行A/D转换,从而得到其功率。功率测试采集的射频频率、功率值如表3。
功率测试是通过射频信号源,产生0dBm(100MHz/500MHz/1GHz)、-10dBm(100MH/500MHz/1GHz)的射频信号,功率信号输入通道有4个,将射频信号接入射频输入通道,在控制器的控制下完成射频功率测量。通过表3测试结果可知,每
个通道的采集误差都在±5%以内,达到了系统的指标设计要求。
5 结束语
本文阐述了基于STM32的故障诊断数据采集系统整体设计与实现方法,主要应用于航空电子系统故障诊断技术的研究。整个系统完成了对某个航空电子系统模块数据的采集、上传、读取、分析和存储等工作。通过对测试数据进行分析,电压、电流、功率的采集误差均在规定的±5%,温度加速度量采集以及上位机软件等功能均能实现,本设计满足航电系统检测要求,达到了技术指标,提高了航电系统的故障检测率和隔离率,提升了对航电系统的综合保障能力。
参考文献
[1] 孙海东,吕健. 航空电子系统健康管理专家系统的关键技术综述[J].电光与控制, 2019,16(7):40-44.
[2] 孙国忠,李丽红,桂学良. 综合航电系统故障诊断健康管理技术[J]. 第33届全国直升机年会,2017,2(3):33-35.
[3] 许明轩. 飞机航电系统故障分析方法与故障诊断技术研究[J].中国设备工程,2018,96(2):96-97.
[4] 曾天翔.综合诊断的发展及其在军用飞机上的应用[J].航空科学技术,2019,16(6):10-13.
[5] 陈曦.基于ARM9和FPGA的高速便携式数据采集前端的设计[D].南京航空航天大学出版社,2020.
[6] 谭金伟.嵌入式 JTAG 仿真调试器的研究与实现[D].电子科技大学出版社,2016.
[7] 刘长亮.基于TMS320F2812的数据采集和FFT研究[D].哈尔滨理工大学出版社,2015.
[8] 李军民,祝红军,王瑞.基于DSP和LTC1857数据采集系统设计[J].微计算机信息,2019,02:115- 117.
[9] 林新荣.CAN总线与RS-422A通信适配器的设计与实现及抗干扰分析[D].哈尔滨理工大学出版社,2015.
[10] 孙海燕.基于ARM的机载数据采集系统的设计与研究[J].计算机控制与应用,2018,37(5):152-155.
作者简介
张强(1980-),男,河南新乡人,研究生,讲师,主要从事无线电自动测试研究。

 京公网安备 11011302003690号
京公网安备 11011302003690号


