



- 收藏
- 加入书签

光伏智能清扫机器人在光伏电站的实践分析
 打开文本图片集
打开文本图片集

摘要:为了给光伏智能清扫机器人在光伏电站中的应用提供一些参考,利用案例分析法,论述了光伏智能清扫机器人的适用条件及原理,探究了光伏智能清扫机器人在光伏电站的应用优势,并对光伏智能清扫机器人在光伏电站的实践进行了进一步分析。得出:光伏智能清扫机器人是基于嵌入式微处理器的清扫装置,可用于太阳能电池板光伏组件的灰尘清扫,具有精准定位、自动执行等优势。表明:光伏智能清扫机器人在光伏电站具有较大的应用空间,推广价值较为突出。
关键词:光伏智能清扫机器人;光伏电站;光伏电池板;传感器;嵌入式微处理器
前言
在中国能源构成中,太阳能发电装机容量占据比例持续上升。根据中国电力企业联合会发布的《2023—2024年度全国电力供需形势分析预测报告》,截至2023年底,中国并网太阳能发电装机规模达到6.1亿千瓦。光伏面板表面灰尘覆盖是影响光伏面板转换太阳能效率的主要因素之一,及时清除灰尘对于提高太阳能电池板光电转换效率具有重要作用。传统清扫手段存在效率低下、精度不高的问题,基于此,探究光伏智能清扫机器人在光伏电站的实践具有非常突出的现实意义。
1光伏智能清扫机器人的适用条件及原理
光伏智能清扫机器人适用于光源充足、太阳能板始终暴露的户外环境,环境内光伏面板倾斜安装,且面板表面摩擦系数较小[1]。
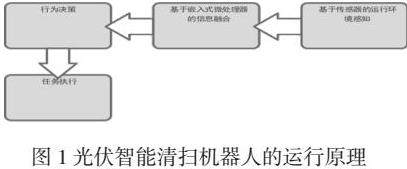
光伏智能清扫机器人主要是借助传感器感知环境,经嵌入式微处理器融合感知环境灰尘数据信息,制定并执行灰尘处理任务[2]。具体运行原理如图1所示。
根据图1,嵌入式微处理器是光伏智能清扫机器人的运行核心,可以实时感知光伏面板组件灰尘信息,及时作出清扫决策,驱动运动部件完成清扫任务。
2光伏智能清扫机器人在光伏电站的应用优势
2.1定位精度高
在光伏智能清扫机器人应用于光伏电站时,不仅可以借助传感器感知自身加速度与速度数据信息,而且可以通过编码器推导感知数据信息获得精准位置信息与航向信息,进而根据相对于初始位置下的偏转角与位置变更情况,摒除外界环境依赖引发的误差累计现象,实现高精度定位[3]。比如,以惯性传感器与地磁传感器构成的光伏智能机器人可以地理坐标系为参考系(X轴为矩形光伏面板的下侧水平边,Y轴为与矩形光伏面板下侧水平边相交的边,Z轴为垂直光伏面板平面向天),设定出发点方向与光伏面板底边呈90°,自动完成地理坐标系向导航坐标系的变换,并记录初始位置[4]。在初始位置一定的情况下,光伏智能清扫机器人可以利用传感器反馈的位置测量值(光伏智能清扫机器人在机体坐标系内的三轴加速度、三轴角速度、三轴地磁强度与线速度),估计当前时刻位置,摒除环境噪声干扰,完成对自身位置的高精度估计。
2.2行为自主化
在光伏电站中,光伏智能清扫机器人可以在光伏电池板及光伏组件上自主执行清洁任务。全程运行过程中,光伏智能清扫机器人呈履带式移动,自适应控制洗扫风速,自动爬坡,不会从光伏电站电池板及光伏组件上滑落,满足光伏电站灰尘清扫需求[5]。在履带式移动过程中,光伏智能清扫机器人可以严格按照预定轨迹对光伏电站光伏面板及组件上附着灰尘进行清扫,即从清扫初始位置出发,按照预定的初始状态与速度,跟随给定的清扫路径,控制过程姿态,确保实际清扫移动速度、移动方向与预定清扫移动速度、移动方向的误差为0。比如,理想的光伏智能清扫机器人质量分布均匀,质点位于几何中心,运动表面加工误差、低速转弯时离心力对机器人的作用、表面装配误差可忽略,且左右履带均与光伏面板具有良好接触,光伏智能清扫机器人在任意时刻的运动均为绕瞬心的旋转运动,左右两侧履带行进方向、速度可依据固定坐标进行自主控制,并根据被控制对象当前状态快速响应、调整,确保光伏智能清扫机器人姿态高度自主[6]。
2.3清扫效率高
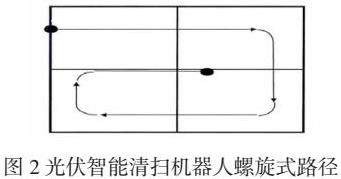
在光伏电站光伏面板及组件上附着灰尘清扫过程中,光伏智能清扫机器人可以高效规划路径,提高清扫效率[7]。当前光伏电站光伏面板及组件清扫机器人可以自动规划螺旋式路径、折线式路径或往返式路径。在螺旋式路径(见图2)规划过程中,光伏智能清扫机器人可以从起点出发沿着直线向前方行进,并在特定位置沿着顺时针(或逆时针)螺旋形移动到光伏面板中心,实现对光伏面板及组件的高效率清扫。
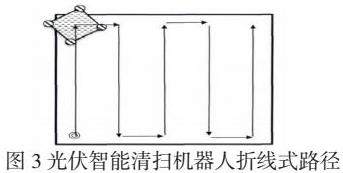
在折线式路径(见图3)规划过程中,光伏智能清扫机器人可以在光伏电站光伏面板表面较为光滑时,自动将清扫方向调整为与底边成90°的方向,沿上下方向清扫,避免受重力作用出现侧滑影响灰尘清扫效率。
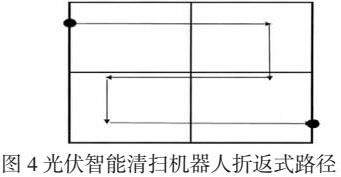
在折返式路径(见图4)规划过程中,光伏智能清扫机器人可以从起点出发,沿着直线轨迹向前方行进,遇另一侧边缘时折返开展直线运动,并自动往返重复,避免人工调整,提高整个光伏电站光伏面板及其组件的灰尘清扫效率。
3光伏智能清扫机器人在光伏电站的实践3.1实践位置
某光伏电站位于黄土丘陵区,境内海拔最高2144m,最低1100m。区域年均日照时数为2864h,近十年平均总辐射量为1456.25kW·h(m2·a),光照资源丰富,满足大规模光伏电站的建设需求。光伏电站规划装机容量为800MW,包括1座2×150MVA的220kV升压站(35kV/220kV)、1座4×125MVA的220kV升压站(20kV/35kV)。光伏电站运行模式为分块发电、集中并网,光伏面板为单晶双面双玻LR-M6-385Wp组件,光伏组件串并联为子方阵,每一个子方阵内包括组件串、逆变器、汇流箱及相关变压设备,在环境温度为25℃、组件倾角为33°、方位角为0°时,单晶硅光伏组件开路电压为38.14V,逆变器直流侧输入电压变化范围为200V~1000V。
3.2实践过程
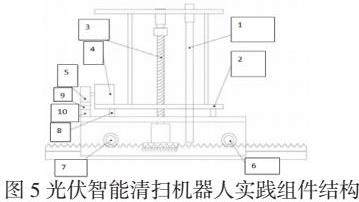
在光伏智能清扫机器人接收到清扫信号后,实践组件结构如图5所示。
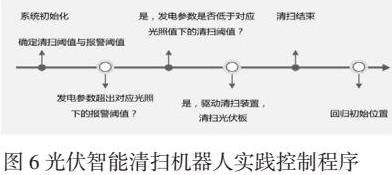
图5中,1为吸尘装置,由吸尘风机驱动,涵盖吸尘风机、吸尘管两个部分;2为支架;3为清扫刷;4为第二驱动电机;5为第二驱动电机驱动的上框架第二齿轮;6为第一转动电机;7为第二转动电机;8为顶部联轴器;9为齿轮横导轨;10为组合导航系统,包括惯性传感器与地磁传感器。在实践过程中,第二驱动电机提供动力,促使光伏智能清扫机器人在光伏电站光伏面板两侧铺设轨道上匀速行驶,并在电机驱动齿轮的作用下横向运转上部框架,到达需清扫灰尘位置。在特定位置,驱动电机与转动电机驱动清扫刷底部刷头,经上部框架内升降螺旋伸缩杆处理光伏板表面灰尘,正转吸取灰尘,反转将灰尘排出。整个过程中,光伏智能清扫机器人实践控制程序见图6。
根据图6,光伏智能清扫机器人实践的依据是不同光照强度下太阳能电池板发电参数超出对应光照下的报警阈值与清扫阈值。在达到对应光照下的报警阈值与清扫阈值后,光伏智能清扫机器人自动规划螺旋式路径或折线式路径。首先,沿着平行于太阳能电池板左侧边直线方向,运动至光伏面板上侧边缘;其次,后退一定距离L,以右侧履带几何中心为旋转中心,行进四分之一圆的圆弧,继续前进一定距离L;再次,后退一定距离L,行进四分之一圆的圆弧(旋转中心为右侧履带几何中心);最后,沿着直线方向行走,进入下一个折返点,重复清扫。实践期间,光伏智能清扫机器人行进距离L计算公式如下:
L=W-H/2式-1
式-1中,L为光伏智能清扫机器人行进距离,cm;W为光伏智能清扫机器人宽度,cm;H为光伏智能清扫机器人长度,cm。
3.3实践效果
在30天实践内,运行光伏智能清扫机器人,通过光伏智能清扫机器人自带传感器采集环境光照强度以及光伏电站光伏面板及组件输入电压、电流,推导光伏板实际输出功率。光伏智能清扫机器人运行前后光伏电站峰值功率如表1所示。
由表1可知,在1个清扫周期内,户外实测每日光伏电站光伏板峰值功率处于波动状态,随着户外光伏电站光伏面板及组件表面灰尘的累积,组件输出功率下滑。而在光伏智能清扫机器人运行后,光伏电站峰值功率维持稳定。表明光伏智能清扫机器人可以确保光伏电站峰值功率处于稳定高位,应用效果较佳。
结语
综上所述,光伏智能清扫机器人是适用于户外光伏电站的装置,具有定位精度高、运行自动化、清扫效率高等优良作用。因此,根据光伏电站实际情况,可组装含吸尘风机、吸尘管、驱动电机、转动电机、清扫刷与导航系统的光伏智能清扫机器人。借助光伏智能清扫机器人,自动判定光伏电站光伏面板及组件上附着灰尘是否达到报警阈值与清扫阈值,自动执行清扫任务,避免光伏电站光伏面板及组件上灰尘累积影响光伏发电效率。
参考文献
[1]李海啸,程强,李山,等.大型光伏电站分布式无功优化[J].重庆理工大学学报(自然科学),2024,38(03):335-342.
[2]谷玉之,瞿畅,徐魏魏,等.光伏组件自动清扫机器人系统设计与研究[J].机械设计,2020,37(09):49-55.
[3]罗彦英,梅益,江明会.基于MPC的光伏清扫机器人防偏摆控制研究[J].传感器与微系统,2023,42(10):44-47.
[4]丁坤,王立,张经炜,等.基于改进导航圆算法的光伏阵列清扫机器人路径跟踪控制[J].河海大学学报(自然科学版),2021,49(02):190-196.
[5]宁会峰,鄢志彬,程荣展,等.光伏组件清扫机械臂动力学建模与分析[J].太阳能学报,2020,41(12):138-145.
[6]梁艺,汪步云,全鹏,等.可变斜面光伏清扫机器人行走特性研究[J].兵器装备工程学报,2023,44(03):239-245.
[7]张劲,应樱,宋鹏,等.基于忆阻神经网络的光伏面板清扫机器人PID控制器研究[J].可再生能源,2021,39(01):37-44.

 京公网安备 11011302003690号
京公网安备 11011302003690号


