



- 收藏
- 加入书签

基于STM32单片机的车辆防碰撞语音预警及自动刹车控制系统设计
 打开文本图片集
打开文本图片集
【摘要】:经济的持续发展促进了我国汽车工业进入了高速发展的新阶段, 随着汽车作为代步工具的逐步普及, 由此引发的交通事故也层出不穷, 车辆碰撞具有致死率高、破坏性强的特点, 给人民群众生命安全带来了很大的威胁。文章基于车辆的防碰撞技术, 对目前正在广为应用的防撞预警系统的工作原理、结构组成及特性进行了分析, 并对未来发展进行了展望。
【关键词】:STM32单片机;HC-SR501热释电红外传感器;SYN6288语音播报模块
引言:伴随着汽车数量的逐年增大,各类交通事故的发生频率也随之增高,智能驾驶逐渐进入人们视野,各类智能化信息系统利用雷达、传感器等监测周边车辆状态,存在碰撞风险及时预警,以便驾驶人员提前采取措施规避风险,确保行车安全。因此,此类防碰撞预警对智能交通的推动与发展有着极大的现实意义。
一、车辆防碰撞语音预警控制系统组成
1.STM32单片机模块介绍:
STM32属于一个微控制器,自带了各种常用通信接口,功能非常强大。
1)串口—USART,用于跟串口接口的设备通信,比如: USB转串口模块、 ESP8266、WIFI、GPS模块,GSM 模块,串口屏、指纹识别模块。
2)内部集成电路—I2C,用于跟I2C接口的设备通信,比如: EEPROM、电容屏、陀螺仪MPU6050、0.96寸OLED模块。
3)串行通信接口—SPI,用于跟SPI接口的设备通信,比如:串行FLASH、以太网W5500、音频模块VS1053。
2.HC-SR04超声检测模块介绍:
1)HC-SR04超声波模块常用于机器人避障、物体测距、液位检测、公共安防、停车场检测等场所。HC-SR04超声波模块主要是由两个通用的压电陶瓷超声传感器,并加外围信号处理电路构成的。
2)两个压电陶瓷超声传感器,一个用于发出超声波信号,一个用于接收反射回来的超声波信号。由于发出信号和接收信号都比较微弱,所以需要通过外围信号放大器提高发出信号的功率.模块主要电气参数:使用电压:DC—5V;静态电流:小于2mA;电平输出:高5V,低0V;感应角度:不大于15度;探测距离:2cm-450cm;高精度: 可达0.2cm
3.HC-SR501热释电红外传感器模块介绍:
HC-SR501人体红外感应模块是一种基于热释电传感器的红外感应模块,可以检测人体或动的热量并输出电信号。它广泛应用于安防、智能家居、自动化控制等领域。热释电红外传感器是一种能够检测物体热场变化的传感器。它利用了材料本身的热电效应,将热能转化为电信号,实现对温度、热辐射等物理量的测量。
主要特点:
1)全自动感应:人进入其感应范围则输出高电平,人离开感应范围则自动延时关闭高电平,输出低电平。
2)微功耗:静态电流<50微安,特别适合干电池供电的自动控制产品。
3)能够实现快速、准确地检测人体或者障碍物
4)温度补偿:在夏天当环境温度升高至30~32℃,探测距离稍变短,温度补偿可作一定的性能补偿。
4.SYN6288 语音播报模块介绍:
SYN6288 中文语音合成芯片是一款性价比更高,效果更自然的一款中高端语音合成芯片。SYN6288 通过异步串口(UART)通讯方式,接收待合成的文本数据,实现文本到语音(或TTS语音)的转换。它 在识别文本/数字/字符串更智能、更准确,语音合成自然度更好、可懂度更高。
SYN6288 语音播报模块的核心特点:
1)SYN6288默认波特率为:9600,输出字符串文本到模块,模块自动输出语音;
2)输出的字符文本可以加入前缀(控制参数,实现音量语速等控制),以实现更自然的朗读;
3)芯片具有文本智能分析处理功能,对常见的数值、电话号码、时间日期、度量衡符号等格式的文本,芯片能够根据内置的文本匹配规则进行正确的识别和处理;
二、项目实施方案
1、项目实施原理概述:
本项目提出了一款基于STM32单片机的车辆防碰撞语音预警及自动刹车系统,首先该系统通过加入电机模拟高速和低速两个挡位,在不同的车速情况下通过按键选择不同的档位,与此同时不同的挡位分别设置不同的阈值,内部的HC-SR04超声波模块和激光测距模块可检测车辆前后障碍物的距离,并由系统分辨与障碍物的距离是否在正常阈值内,一旦有人体或者障碍物超过正常阈值,蜂鸣器会发出震动响声,同时使用SYN6288语音播报模块和LED显示屏,会显示出障碍物距离车辆的距离并进行语音播报,并及时刹车。
2、总体设计:
在总体的系统设计中,要合理地运用HC-SR04测距模块并明确SYN6288芯片的配置,同时应注意HC-SR501热释电红外传感器的使用,最终将各模块合理统筹运用,进而完美实现各种预期功能。
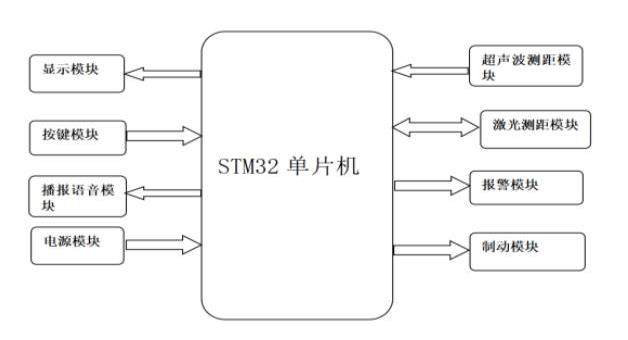
3、项目硬件概述:
系统的设计主要由八部分组成。超声波测距模块、激光测距模块共同组成采集外部环境数据部分,按键模块单独为外部输入部分,电源模块单独组成外部供电部分,经过单片机进行数据分析与处理,继而控制继电器制动,将实时信息显示到显示模块上,并且控制报警模块和语音播报模块提示车主。
参考文献:
[1]石莹 刚宪约. 基于有限元的汽车轻量化车身防追尾碰撞仿真[J]. 计算机仿真,2019(11):110-113.
[2]王鑫宇 张晧. 汽车防撞控制系统构建中雷达技术的应用[J]. 南方农机,2020(14):173-174.
[3]李闯 庄可 周偲怡等. 车辆驻车开门防撞的智能预警系统[J]. 单片机与嵌入式系统应用,2019(9):69-72.
[4]王虎 杨启正 李约朋. 基于超声波测距的汽车倒车防撞报警系统设计[J]. 时代汽车,2019(21):44-45.
[5] 胡俊杰 李亚军 崔旭东.一种基于车载激光雷达的车辆防碰撞系统设计[J].电子设计工程,2021,29(02):8-10.
[6]李建华 陈建民. 基于智能交通系统的车辆防碰撞技术研究[J]. 计算机工程与应用, 2019, 55(05):161-164.
宿州学院资助国家级大学生创新创业训练计划项目,
项目名称:基于STM32单片机的车辆防碰撞语音预警及自动刹车控制系统设计。

 京公网安备 11011302003690号
京公网安备 11011302003690号


