



- 收藏
- 加入书签

基于虚拟仿真的《工业机器人仿真技术》课程教学改革研究
 打开文本图片集
打开文本图片集
摘要:工业机器人仿真技术是一门利用工业机器人仿真软件实现自动化产线或机器人工作站的虚拟工作流程的课程。在教学中引入虚拟仿真实验作为课程前导,该实现是结合课程教学目标及课程重难点,由高校和企业合作开发完成。实践教学证明采用虚拟仿真实验后,能更好地吸引学生的学习兴趣,使学生了解仿真过程原理,取得良好的教学效果。
关键词:工业机器人;虚拟仿真实验;实践教学
1 前言
随着科学技术的发展,工业机器人在我国智能制造行业的大量应用,工业机器人系统集成项目的仿真设计逐渐成为行业技术人员的必备技能,仿真设计可以在设计方案阶段对实际工程项目进行计算机模拟,形成生产动作仿真视频,利用该技术可以直接观察机器人在产线中的生产情景,优化设计、节约设计时间、降低成本,验证设计正确性;另外在项目调试阶段,现场编程工作量大,可采用仿真软件提前离线编程,利用在线编程功能分担调试人员调试工作[1]。目前各高校对工业机器人仿真教学的经验不足,主要体现在相关实验教学平台匮乏,缺少理论性较强的教材,高质量的企业应用案例与高校教学之间无有效连接,教师实践操作能力不足。因此未来多数高校对该课程的教学将大量采用VR实验等新方法弥补实体设备的不足,结合行业应用不断开发教学案例[2]。
2 专业特色
2.1 课程设置
本课程针对市场上占有率较高的一款工业机器人品牌ABB,及其仿真软件RobotStudio进行分析,以软件的基本操作使用为教学目的,利用项目式教学的方法,配合主要知识模块加以讲解,并以工业机器人的典型应用案例,码垛和焊接的工作站仿真详细讲解,玻璃清洗工作站的应用制作VR课程,试图把理论知识点与实际案例紧密结合。《工业机器人仿真技术》课程为上机实践课,课程按照传统的时间教学开展需要32学时,各章节均以上机实践为主,主要完成对RobotStudio软件的基础入门,到工作站搭建和仿真的内容,通过本门课程的学习学生可以实际掌握一门仿真软件的应用,并且对实际工业机器人的工作站的设计原理有一定的了解。
2.2虚拟实验的教学重难点
对工业机器人仿真技术这门课知识点的讲解紧密围绕机器人仿真的理论,重视软件实操,引入虚拟仿真实验等新教学方法,能够更加吸引学生参与式学习[3]。在本课程中引入玻璃清洗工作站进行工业机器人仿真技术的实验教学可以增进对工业机器人搬运技术的感性认识。教学重点:使学生了解玻璃清洗机器人工作站的模型导入,完成整体布局,掌握工作站主要设备和玻璃清洗和搬运的过程工艺;教学难点:掌握玻璃清洗机器人工作站的配置Smart组件参数的技巧、离线编程;掌握RAPID语言编程和仿真设置方法。教学目标:推进机器人工程仿真技术的运用,培养应用型、创新型人才[4]。
3 实验的原理与操作
3.1 实验原理
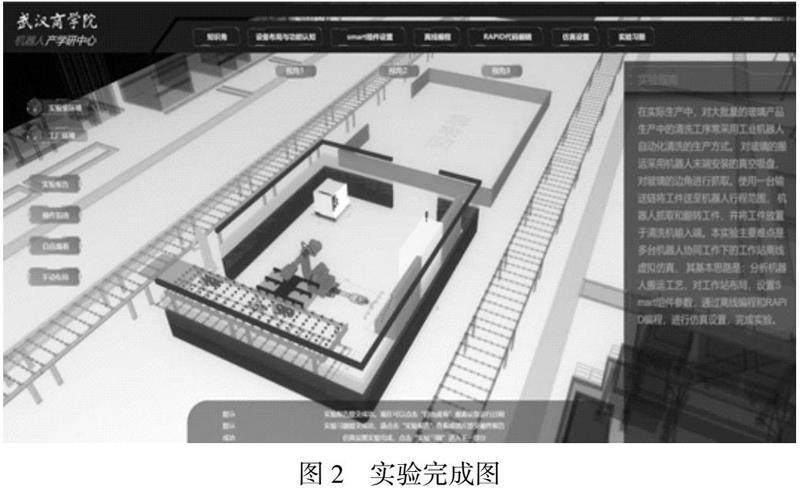
玻璃清洗工作站虚拟仿真实验教学平台的开放运行依托于开放式虚拟仿真实验教学管理平台的支撑。开放式虚拟仿真实验教学管理平台以计算机仿真技术、多媒体技术和网络技术为依托,采用面向服务的软件架构开发,集实物仿真、创新设计、智能指导、虚拟实验结果自动批改和教学管理于一体,是具有良好自主性、交互性和可扩展性的虚拟实验教学平台。
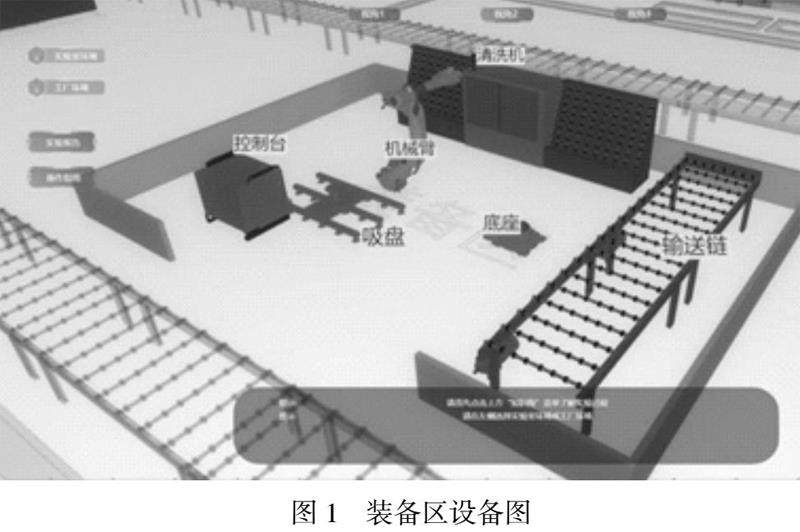
在实际生产中,大批量玻璃生产的清洗工序常采用工业机器人自动化清洗的生产方式。工厂产线上,工业机器人对玻璃的搬运采用机器人末端安装的真空吸盘,对玻璃的边角进行抓取,使用一台输送链将工件送至机器人行程范围,机器人抓取和翻转工件,并将工件放置于清洗机输入端。本实验主要难点是机器人与输送链、清洗机等外部设备协同工作下的工作站离线虚拟仿真,其基本思路是:分析玻璃清洗的工艺,对工作站布局,设置Smart组件参数,通过离线编程和RAPID编程,进行仿真设置,完成实验。
3.2实验操作
1、操作指南与知识角学习(2步)
① 实验之前阅读实验步骤查阅操作指南;
② 选择工厂环境或实验室环境,完成对知识角的阅读。
2、设备布局与系统创建(7步)
①选择合适视角,将机器人底座从装备区布局至实验区草图上对应位置;
②将机器人本体安装至机器人底座上面;
③安装吸盘工具至机器人末端;
④将输送链布局至实验区草图上对应位置;
⑤将清洗机布局至实验区草图上对应位置;
⑥将控制台布局至实验区草图上对应位置;
⑦点击创建机器人系统,完成系统的创建。
3、Smart组件的设置(4步)
①为输送链创建smart组件,从组件列表中勾选LinearMover、PlaneSensor、Queue、Source、LogicGate(Not)添加至SC-输送链;
②为清洗机创建smart组件,从组件列表中勾选LinearMover、PlaneSensor、PositionSensor、Queue、Source、LogicGate(Not)添加至SC-清洗机;
③为工具创建smart组件,从组件列表中勾选Attacher、Detacher、LinerSensor、LogicGate(Not)添加至SC-工具;
④点击‘提交’完成Smart组件的设置。
4、离线编程(4步)
①在3D环境中选择目标点‘ppick’,点击‘示教目标点’;
②在3D环境中选择目标点‘phome’,点击‘示教目标点’;
③在3D环境中选择目标点‘pplace’,点击‘示教目标点’;
④点击‘添加新路径’,完成离线编程。
5、RAPID代码编辑(3步)
①对初始化子程序编辑;
②对抓取子程序编辑;
③对放置子程序编辑;
6、仿真设置(2步)
①对仿真进行设置,勾选smart组件、控制器,选择单周期运行模式;
②新建I/O连接信号,SC-工具信号‘doGrip’、‘doPlaceDone’以及SC-输送链信号、SC-清洗机信号。
3.3学习效果对比
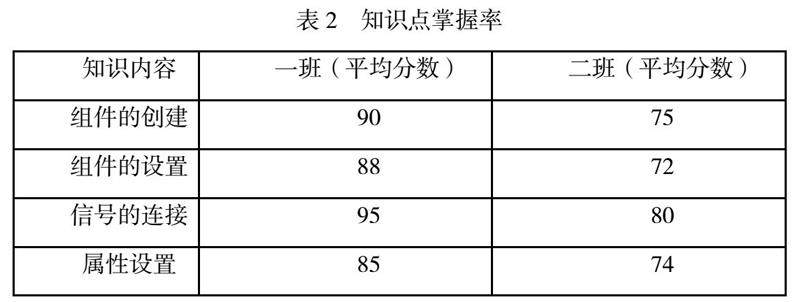
在20级机器人工程的两个班级进行课程中‘Smart组件的应用’教学章节效果对比,其中一班36名同学在上课之前完成了玻璃清洗工作站虚拟仿真实验,其平均成绩为88分,二班作为对比班级没有布置该任务。如表2所示,两个班级在课程后对知识点的掌握情况来看,一班在smart组件的创建、组件的设置、信号的连接,属性设置等难点上掌握情况明显好于二班。基于对学生实践能力培养的效果来看,采用虚拟仿真实验教学更好地实现了课程的培养目标,提升了学生对课程知识点的掌握能力,以及软件的实际应用能力。
4 结论
通过虚拟实验学生能够轻松改变实验参数,实现不同条件下的实验研究,同时可以通过排除次要信息的混淆干扰,获得实验的关键信息;虚拟实验可以节省大量从非稳态到稳态工况的等待时间,可以在有限的时间内使学生完成较多的实验内容,效率高;虚拟实验可以清晰展示不方便观察的细微观或变化量较小的实验现象。利用本虚拟实验进行工业机器人仿真技术的课程预习,可以使学生在一个虚拟实验环境中,利用自己对模型的观察与分析,就会形成一个相对较为直观的印象,这一点可以弥补学校在实验设备和实验场地缺乏的不足。同时,实验案例简单易懂,操作环境友好,学生可以随时随地的手机或者电脑上完成,虚拟实验内容和课程内容紧密相关。学生在实验过程中也提前学习了RobotStudio软件的操作原理,促进了学生对问题的探究意识,进而实现了教学效果的提升。
参考文献:
[1]陈鑫.基于STEAM教育理念的机器人仿真技术知识图谱构建研究[J].信息与电脑(理论版),2021,33(12):222-224.
[2]孙青锋.高职院校工业机器人技术专业虚拟仿真实验教学研究[J].吉林工程技术师范学院学报,2020,36(06):74-76.
[3]陈荣川. 机器人流水线自动装卸平台虚拟实验设计与强化学习初探[D].东华大学,2020.
[4]刘相权.MATLAB在机器人虚拟仿真实验教学中的应用[J].教育教学论坛,2018(15):261-262.
[5]吕明珠.基于Robotmaster的工业机器人虚拟仿真实验平台设计[J].电气开关,2017,55(06):20-23.
[6]陈鑫.工业机器人工作站虚拟仿真详解[M].机械工业出版社,2021,12.
[7]谢献忠,梁小玲,吴亮红,席在芳.我校虚拟仿真实验教学资源的建设与探索[J].当代教育理论与实践,2022,14(06):68-73.
基金项目:2021年武汉商学院教学改革研究项目(2021Y011)
作者简介:陈鑫,男,硕士,讲师/工程师,主要研究方向为机器人仿真有运动控制。
(作者单位:武汉商学院机电工程学院)

 京公网安备 11011302003690号
京公网安备 11011302003690号


