



- 收藏
- 加入书签

基于MP地面站对四旋翼无人机协同作业的研究
 打开文本图片集
打开文本图片集
摘要:四旋翼无人机作为近年来的一种新兴科技成果,运用场景不断扩展丰富,现多被运用于军事、生活、农业及科研。然而,随着飞行环境和任务日趋复杂,单架四旋翼无人机的性能已不能满足目前的要求,多架无人机间的协作是目前无人机研究的一个热点。本项目基于mp地面站进行二次开发,并搭载OpenMV识别模块实现四旋翼无人机协同作业。项目使用飞机为Pixhawk开源飞行控制系统,实现四旋翼无人机的协同作业。测试结果表明,无人机可在空中稳定飞行并完成协同,设计提出的方案有效可行。
关键词:四旋翼无人机; MP地面站二次开发; OpenMV识别模块;
一、绪论
四旋翼无人机作为近年来的一种新兴科技成果,运用场景不断扩展丰富,现多被运用于军事、生活、农业及科研。然而,随着飞行环境和任务日趋复杂,单架四旋翼无人机的性能已不能满足目前的要求,多架无人机间的协作是目前无人机研究的一个热点。在一些具体应用上,由多个无人机完成作业的效率确实更高,
大量的无人机研究也都开始提出和研究无人机的多机协同技术上面,例如:消防救援,户外巡逻等多个项目,往往都需要多个无人机协同作业,可以合理有效的提高精确度,缩短工作时间。
二、设计方案
本文由无人机、视觉模块、控制模块组成。无人机为四旋翼无人机;视觉模块使用是低成本,可扩展,使用python驱动的视觉模块OpenMV;控制系统使用Mission Planner地面站,Mission Planner支持多种操作系统,包括Windows、Linux和macOS,简称MP地面站。项目围绕着基于二次开发过的MP地面站实现四旋翼无人机协同作业的研究,目的是探究多架无人机之间协同作业的框架与方法,并通过实验和测试验证其效果和可行性。实验以二次开发的 MP地面站和OpenMV模块为基础,在搭载 Pixhawk 开源飞控的四旋翼无人机平台上对四旋翼无人机协同作业进行研究验证。
(1)任务执行模块
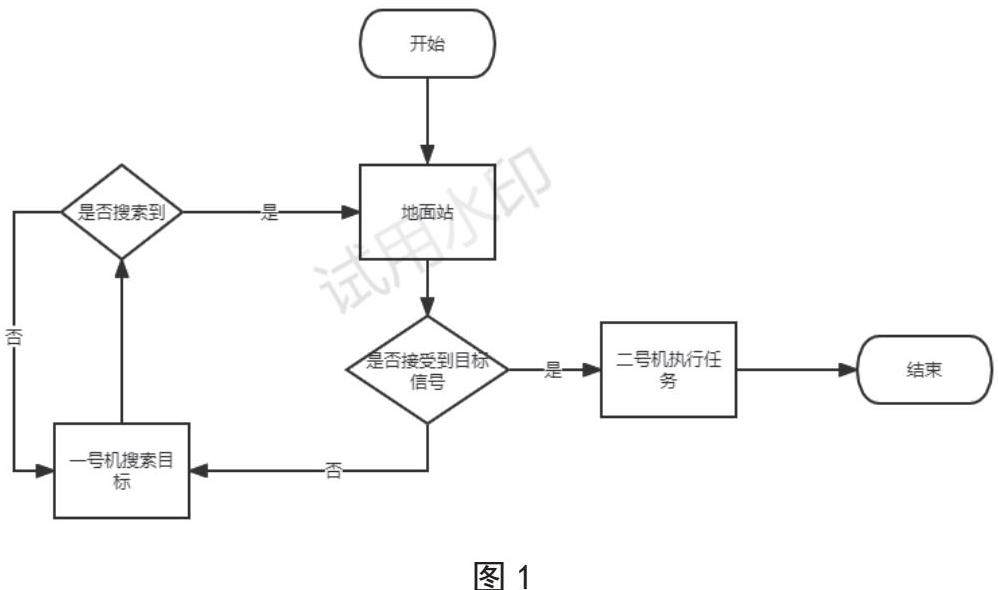
多旋翼无人机其包括:F450机架,pixhawk飞控,OpenMV。执行任务时,巡逻机接收地面站发出的启动信号,并在指定范围内寻找目标,在OpenMV锁定目标后无人机向地面站传输信号并将OpenMV所取得的目标位置与图片信息传回地面站,在原地持续扫描向地面站持续传输目标点位信息,若在区域内未识别到目标点信息,则向地面站进行反馈,由地面站再次编辑航线后继续进行巡逻任务,直到检测到目标位置为止。地面站在接收巡逻机信息后通过自行规划航线,将指令传到作业机,作业机在收到信号后起飞,在指定位置完成任务后对地面站进行反馈,若途中目标点位发生变动,则根据地面站的指令更改目标点位或返航,在地面站接收到作业机信号后地面站命令返航,本次任务完成(如图1所示)。
(2)图像识别模块
图像识别模块在本项目有OpenMV和图传两个硬件组成。图传在任务中起到监测周围环境保护无人机的作用。
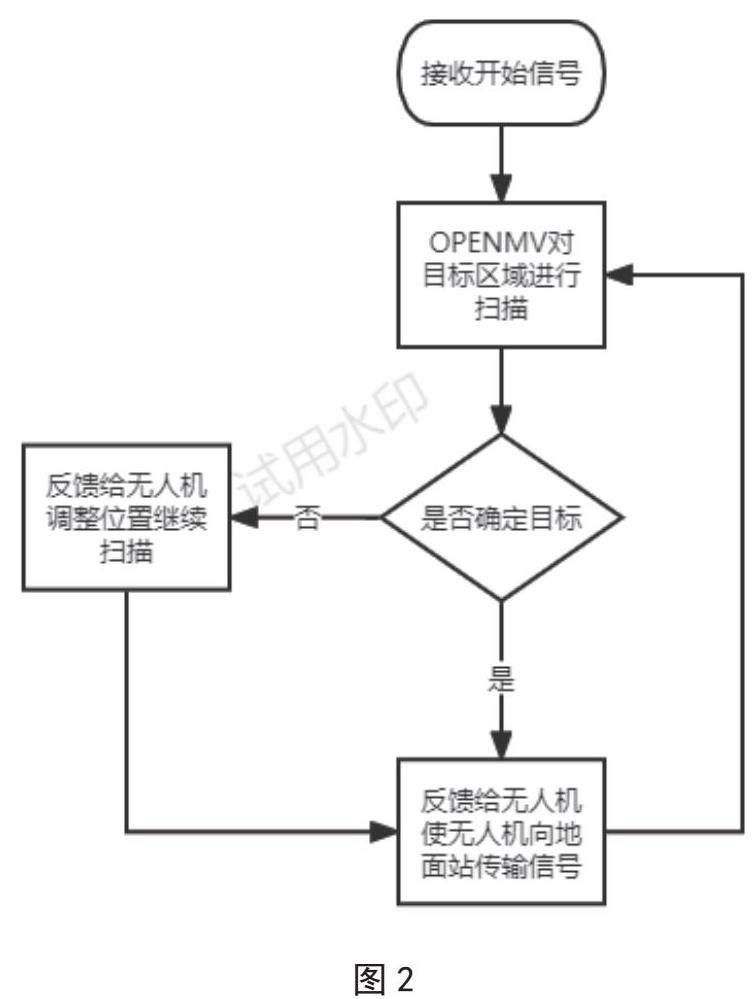
图像识别系统基于OpenMV进行图像识别,通过使用Python的图像处理程序。此系统支持Python语言,并且提供了图像处理和分析的相关库和API。会利用其上装备的图像传感器采集环境中的图像。
一旦获取到图像(如图2所示),OpenMV 会将其转换至色彩空间。系统中通常使用 RGB 色彩空间,即基于红、绿、蓝三原色分量构成的表示法,但在特殊情况下也会使用 HSV 或 LAB 色彩空间OpenMV在无人机上对地面目标进行扫描识别,在检测到目标后对无人机上的飞控进行信号反馈,再通过数据传输模块将地面站的信息反馈回无人机组并在OpenMV定位下完成指定任务,在我们项目中OpenMV起到的作用就是进行颜色和图像的分辨,同时实时进行图像与位置反馈。将OpenMV与二次开发后的MP地面站通Mavlink协议相连接通讯,编写颜色识别代码使OpenMV的摄像头能够识别并捕捉到颜色然后通过Mavlink协议将识别到的的物体位置信息回传到MP地面站之中,使MP地面站能够获取位置信息并自动识别规划其他飞机的航线。
(3)数据处理模块
数据传输模块是Wifi数据传输模块,其的特点是在小范围内支持多个目标的数据传输,由于我们使用多机完成本次项目,所以在无人机之间通过Wifi数据传输模块进行连接,利用Wifi数据传输模块在小范围内可以以一个总台连接多个目标的特点,使多台无人机与地面站之间建立稳定的数据传输网络。
主要控制模块为Mission planner,它具有强大的功能,如三维模型显示、航线规划、实时遥测数据监控和记录、自动飞行模式配置、姿态和位置调校等。本项目研究了 MissionPlanner地面站的集群模块,并对其采用的地面站通过巡航机的航线与设置的任务机相对位置,实时计算出各无人机的航线并进行规划,巡航机也实时将自己的位置传回地面站,地面站借此比较巡航机相对距离与安全距离,实时更新任务航线,实现无人机编队飞行。
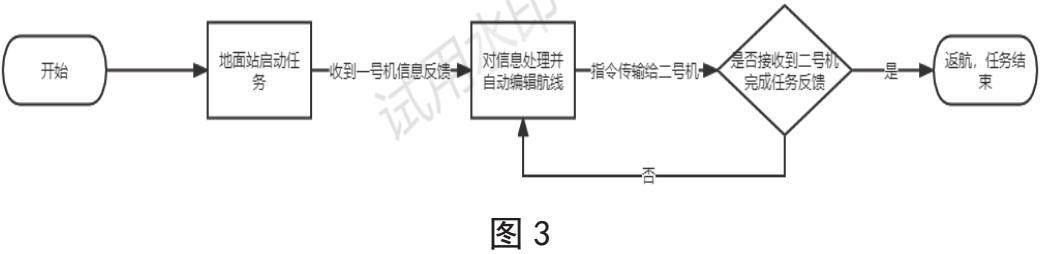
此项目对MP地面站的要求更高,需要开发更多的功能,我们对地面站进行了二次开发。添加了mavlink协议的指令,mavlink的指令添加结合了控制器端的代码来联合调试,经过二次开发的地面站支持避障和电子围栏功能,可以为无人机航线规划提供更安全可靠的保障。开发后的MP地面站可以在接收信号后自主规划航线,在短时间内设计出最优的飞行路线。同时也可以轻松设置电子围栏,使无人机在规定区域内飞行。能够在接收到位置信息之后根据目标所在位置为其他四旋翼无人机规划最优航线并且发送指令让其他无人机直接飞往目标所在地。MP地面站工作流程图(如图3所示)。
三、实验测试
为提高测试精准度和各种情况故障排除,本项目分别对各个模块进行了分组调试,在测试过后将各个模块结合起来正式进行完整测试。实验围绕着三个模块的配合完成,三大模块的调试分为以下步骤。
(1)任务执行模块实验
任务执行模块是整个任务能够开始的基础条件,是整个项目的基础。本模块使用pixhawk飞控,作为整个执行模块的中枢,对数据进行处理和分配,使用接收机对外界信号进行接收,再经过解码板解码后将数据传输到飞控,飞控将命令传输到各个目标后利用所搭载的WIFI数传对无人机现状向地面站进行实时反馈通过电脑观察无人机数据。
(2)图像识别模块实验
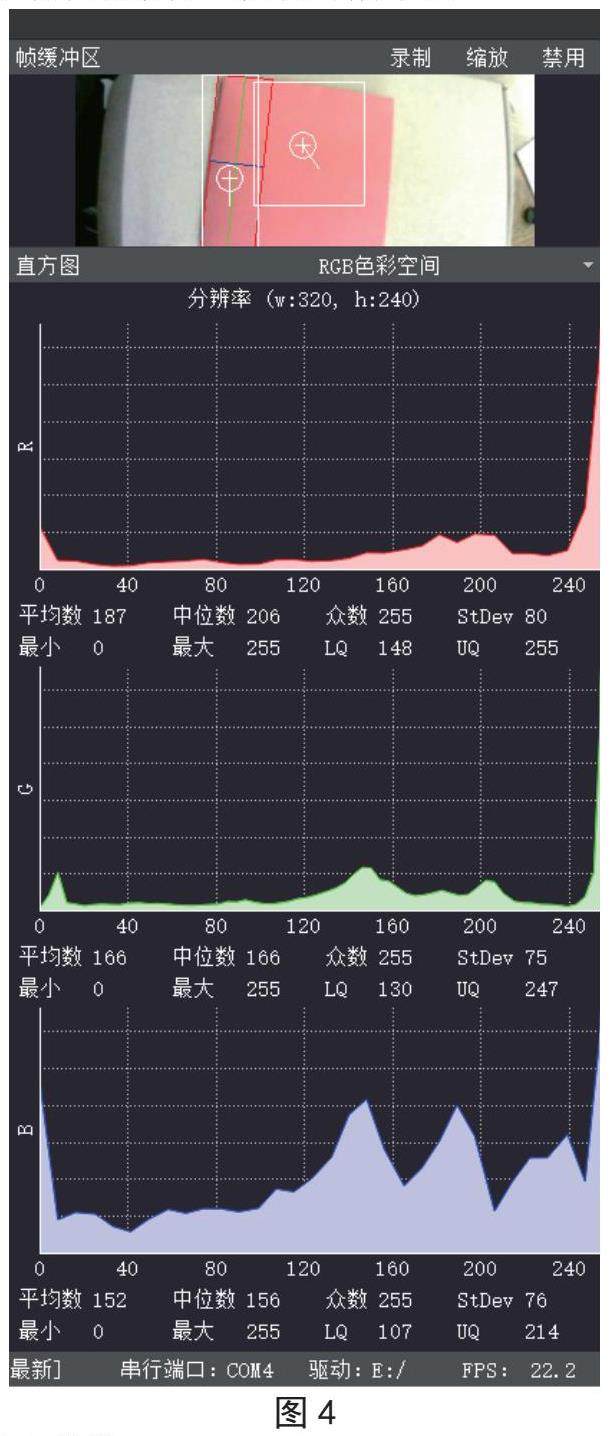
调试的对象为图传和OpenMV,两者为本项目进行有效反馈的重要条件。将图传摄像头安装于无人机下方,与FPV屏幕连接,直到可以显示所拍摄的画面为止,图传调试成功。将OpenMV先与电脑上的程序进行连接,得到图像变动时的数据反馈即可与与飞控上已经设置好的team1端口连接,当任务执行时,OpenMV收到地面站所发出的任务开始指令时对区域内没目标进行扫描检测,并对所处位置进行定位,当锁定目标位置时将目标位置与图像所产生的指令通过飞控上连接的WifiSHUCHUAN 反馈给地面站,在此过程中,OpenMV时刻对目标点进行扫描锁定(如图4所示)。
(3)数据处理模块
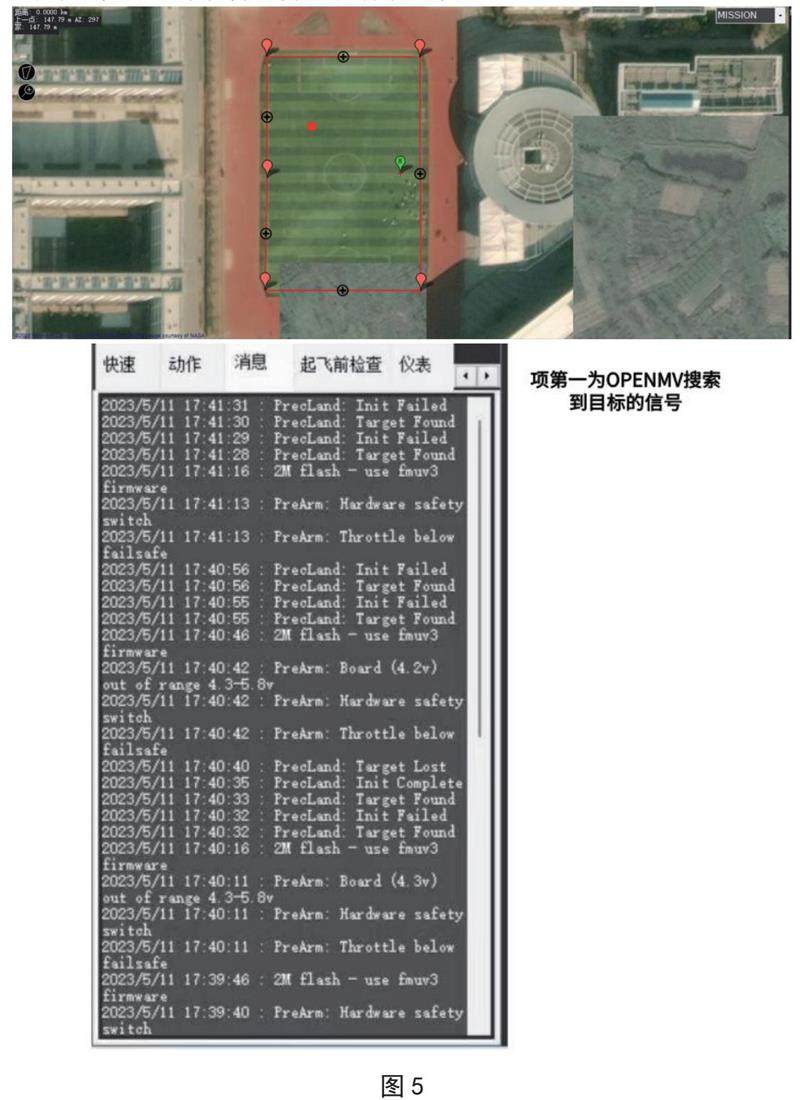
数据处理模块为二次开发过的MP地面站,在整个项目中进行无人机的调动与航线编写。首先使用地面站编写航线并与无人机进行连接,尝试是否能顺利运行,再用之前实验所获得的OpenMV的数据进行导入,看是否可以顺利自主完成航线编写,若可以完成,则数据处理模块能够正常使用,在任务执行过程中屏幕上显示检测到下图信号时则第一段任务完成,其编写航线内容随数据不同而变化(如图5所示)。
最终,任务执行时对场地进行布置,运行所有模块,我们可以观察到在无人干扰的情况下,地面站和无人机组在三个模块的配合下顺利完成整个任务,并进行有效反馈。
结语:
本次研究实现了使用二次开发的地面站和OpenMV模块为基础对于多旋翼无人机协同作业的研究,并实现了多台无人机之间信息传输,区域检测定位,数据反馈,定点悬停的研究成果,本次研究基本完成了本次大创时的项目预期。本项研究在多机协同方面改善了时序约束带来的问题,如死锁问题,使不同性能无人机组成的多无人机系统的协同控制问题得到改善。对于时序等多无人机系统遇到的问题我们采用由地面总台集中控制的方法,每台无人机分别完成各自的任务后将数据传至总台,经过处理后再将信息逐一发送到各台无人机,使多无人机系统在不冲突的情况下各自完成总台所分配的任务。从而解决多台无人机之间自行分配所产生的时序约束等问题。本次研究不足之处在于可制作的无人机种类有限,无法取得大量不同种类无人机组在对应地况的实验数据,之后的研究我们将针对特殊地况的无人机进行设计,取得更多的实验数据来完善本次研究。
参考文献:
[1]袁利平,夏洁,陈宗基.多无人机协同路径规划研究综述[J].飞行力学,2009,27(05):1-5+10
[2]王琼,刘美万,任伟建,王天任.无人机航迹规划常用算法综述[J].吉林大学学报(信息科学版),2019,37(01):58-67
[3]万昱堃,许育帅,季明辰,刘向进.基于Mission Planner的无人机长机僚机法集群控制[J].自动化应用,2020,(03):3-7
[4]朱莉凯,沈朝萍,沈宝国,杨文杰.无人机航迹规划群智能优化算法综述.《数字技术与应用》;2019-06-13
[5] 孙璐,李文哲,王小凌.基于AFCS自动改平模态的联合仿真及应用探索.《国外电子测量技术》;2022-03-07
基金项目:项目名称:基于mp地面站系统对四旋翼无人机协同作业的研究(项目编号:202213905023Y)。

 京公网安备 11011302003690号
京公网安备 11011302003690号


