



- 收藏
- 加入书签

基于视频识别和姿态采集技术的川藏无人区可储电式道路危险驾驶监测警示通信护栏
 打开文本图片集
打开文本图片集
摘要:为了促进国家公路安全设施建设和保障驾驶者在川藏公路上的行车安全,本文对当前川藏公路所涉及的路面设施产品和其他相关设施进行了全面化解析和采样研究,发现并探究目前川藏公路安全设施的不足,根据问题调查的结果,设计出基于视频识别和姿态采集技术构建川藏无人区可储电式道路危险驾驶监测警示通信护栏。本文结合川藏地区的高原环境状态与实际硬件应用环境进行了全新的护栏结构研发,引入支撑性较好的三角形结构,更稳定的同时提高光伏能源捕获效率。采用不间断式硬件协作模式,全区互联,各设备以组网形式进行分布以达到全方位布设,并通过不断对通信护栏周边环境、太阳光照角度以及驾驶人行车方向以及光伏电池板的多项数据采集进行最高效的能源捕获与安全服务介入,采用全新的视频识别反馈与姿态识别算法呈现了全局化的综合分析定位,满足驾驶人在高速行车状态的动态识别,通过道路运输车辆检测信息化管理系统进行数据反馈、积累以及控制,从而改善当前川藏线公路的综合驾驶风险,保护驾驶者的行车安全。
关键词:川藏公路无人区;视频识别;姿态采集;光伏发电;危险驾驶;通信护栏
1.研究背景
川藏公路线路较长,是被称为“中国的景观大道”的318国道中最精华的组成部分,但也被认为是世界上最艰险的道路;另外,由于高原缺氧、地质较差和施工困难等原因,安全设施相关的建设相对薄弱,导致削弱了驾驶者“自驾进藏”的决心,阻碍了西藏旅游业的发展,与此同时,利用物理仿真、传感器采集搭建虚拟化城市交通底座,覆盖安全、执法、畅通、服务等应用领域,打造集组态、监控、检测、分析、判为一体的先进交通指挥决策系统的智慧交通正在逐步发展,因此对利用智慧交通方案优化川藏公路沿线安全设施的建设具有重要的现实意义。
本文初期的数据调研显示,当前中国公路路面设施建设范围广大,路面设施建设需求非常广泛,由于川藏地区地处高原,进藏沿途多为高原山区,路况复杂,司机很容易有高原反应现象,精神状态在川藏地区会收到一系列影响,如果长时间疲劳驾驶很可能把车开下路基或山下,发生一定危险,而目前西藏地区公路并未有任何保障措施,综合公路驾驶异常危险。
当前对川藏公路沿线的研究主要集中在地质灾害成因分析及整治方面,部分学者归纳了川藏公路沿线地质灾害类型以及评估了该沿线地质灾害危险性[1]-[2]。但是,只是局限于某一方面,对于需要多方面考虑的驾驶安全问题却缺乏较深入探讨。因此,本研究以川藏公路无人区的驾驶者行为采集为出发点,设计出基于视频识别和姿态采集技术构建川藏无人区可储电式道路危险驾驶监测警示通信护栏,并结合光伏能源捕获技术、川藏地区的高原环境状态与实际硬件应用环境进行了全新的护栏结构研发。
2.设计原理
2.1视频识别技术
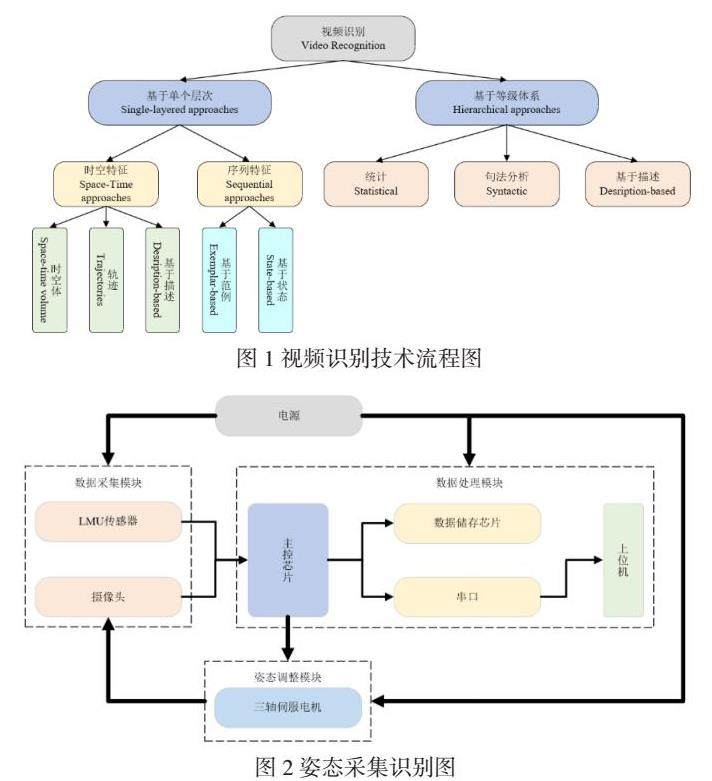
本研究采用多层次应用的方式,采用多个摄像头模组,每个功能区都内置不同的摄像头传感器,采用一种基于机器视觉的视频识别算法,综合化的完成整体服务,技术路线如下图所示。
本研究采用了联合密集轨迹与深度视觉特征的视频识别算法,流程可以大体分为以下三个步骤:
(1)构建时空特征体。对于每一个视频,首先将其截取为若干张帧图像并归一化到合适的尺寸,随后利用卷积神经网络获取视频中每一帧空间特征,并将他们有序的排列起来,这样一方面可以利用卷积神经网络在构建图像空间特征的强大能力,得到视频中的RGB信息,另一方面有序的排列视频帧还可以小部分保留视频序列上的信息。与此同时,视频的帧图像还将在多尺度空间中密集的进行采样操作,并进行轨迹跟踪,从而得到视频中大量的动作信息。
(2)在黎曼流形和欧式空间中分析视频时空特征表达体。在第一步中,得到视频的时空特征表达,这一联合特征能够全面的表达视频时间与空间方面的信息。对于表达时间特性的轨迹特征,可以在欧几里得线性空间中计算每对样本之间距离。而对于表达空间特性的深度视觉特征,利用奇异值分解方法得到该特征的主成分分量,显然这一分量不再位于线性空间中,应使用一种特殊的黎曼流形空间—格拉斯曼流形度量样本对之间的距离。
(3)多核支持向量机分类。将来自两个空间的度量信息使用线性融合方式结合在一起形成一个新的核函数。经过比较与分析,最终完成识别。
2.2姿态采集技术
在整个的识别系统中,本研究的核心技术是全新的单目惯性光导测距辅助姿态采集技术集成,所以本研究将单目光导测距技术与姿态采集技术进行了全新的结合,利用一种基于惯性测量单元的单目测距系统去采集用户的肢体姿态动作范围,并根据摄像头所回传的图片信息进行“多帧比对与合成”,采用基于结构光测距的方法。对投射光源进行编码,而摄像头采集的将是被编码的光源投影到物体上被物体表面的深度调制过的图像,采用匹配角点的方式去精确化整体的姿态识别范围,最终结合后续的摄像头识别技术完成整体的姿态采集。技术路线如下图所示。
整个的数据采集系统本研究采用统一的模块制式,数据处理模块包括主控芯片、数据存储芯片、串口和上位机。主控芯片通过信号线与IMU传感器连接,数据存储芯片和串口通过信号线分别与主控芯片连接,上位机通过数据线与串口连接。测距前主控芯片时时接收来自IMU传感器的摄像头姿态信息,经过运算处理后精确校正摄像头与被测目标点的位置坐标差,并运算得出摄像头姿态控制指令,最终将姿态控制指令转化为电机的控制量,发送给姿态调整模块。测距时主控芯片将对接收到的来自摄像头的图片信息进行处理,根据小孔成像模型以及相似三角形几何原理得到被测距离,将处理结果保存到数据存储芯片并通过串口发送给上位机,完成整个姿态采集与安全服务。
3.创新特色
3.1设备结构设计
本研究采用全新的围栏设计,参考“画板”形式,引入支撑性较好的三角形结构,更稳定的同时提高太阳能能源捕获效率,如上图,黑色部分为本项目的太阳能电池板植入部分,白色部分为3M反光+灯板警示位置,上侧两个模块为本项目的摄像头模组,系统通过上侧的摄像头模组进行车辆识别与动态的驾驶人状态捕捉,根据多个硬件模组反馈回来的视频数据综合分析并进行动态评估反馈,采用分散式布局,依靠本项目的动态信息交互进行网络链接,由每个安置在不同区块的硬件设备组成通信网络,实时反馈硬件采集信息,依靠数据通信保障每个驾驶人的行车安全,同时帮助每个进藏的用户改善无人区的实际通信环境[3]。同时,为了降低综合产品成本,本项目在两个间隔的前述硬件设备的中间段中安置了不具备智能功能的桥梁防护栏,以保障整个道路设施的完整设置。整体结构简单且实用,在车辆发生碰撞时可避免护栏折断,防止行人翻越,安全可靠,实用性强,从而达到最佳防护效果。
3.3机械部分设计
由于本项目的警示需要,本项目在原始的交通信号灯的基础上还进行了全新的机械设计,可以使得光伏板本体接受到良好的光照角度,提高光伏板本体的发电效率[4]。
本研究通过前述的智能可储电式通信护栏与信号灯相结合,将综合产品技术全局化,让整个路段的所有设备设施均由本项目的软件系统进行调度控制,依靠多个硬件的协同实现最终完整化的安全警示与通信服务,让本项目的系统能轻松的掌握所有可能性的路面信息,把控整体安全服务走向,以保障综合服务完整。
3.4软件部分设计
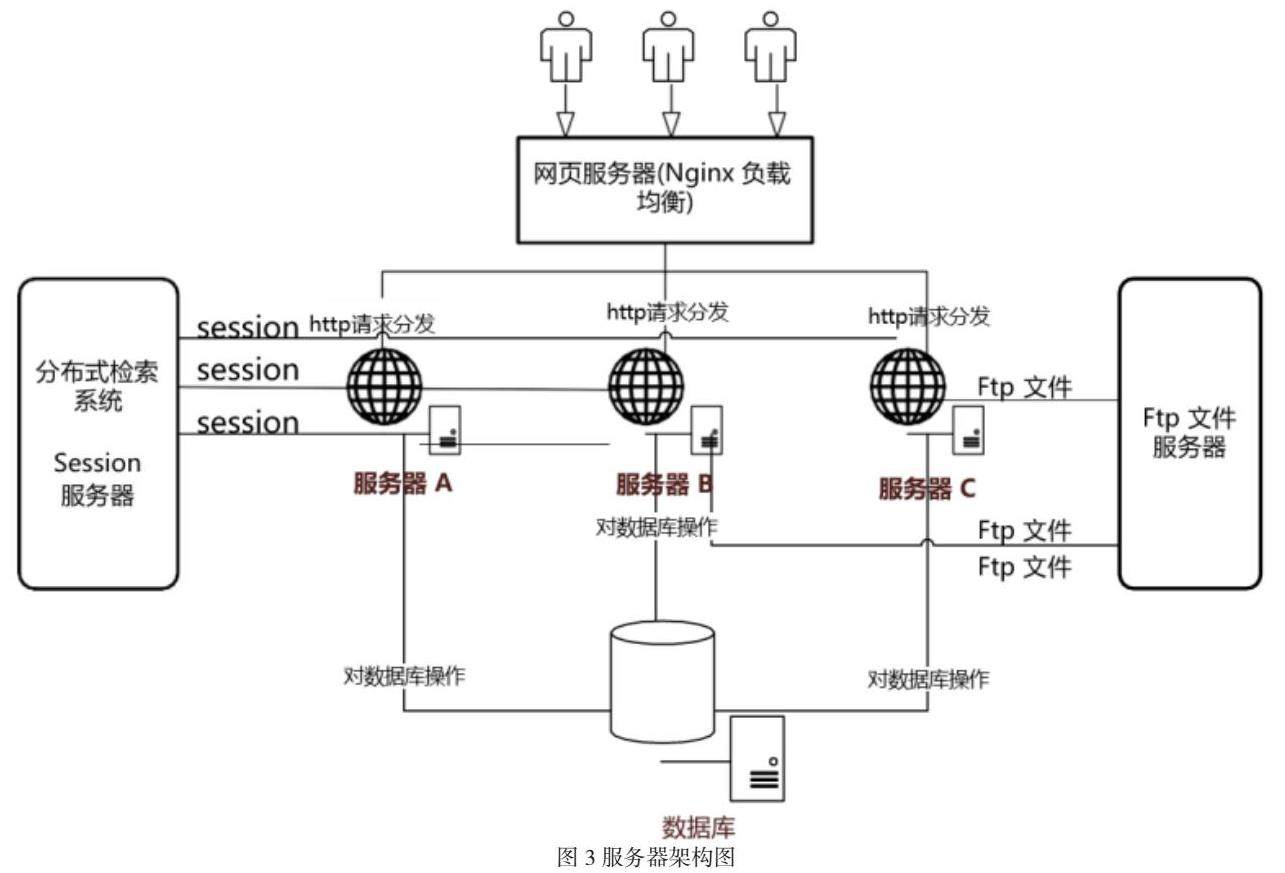
本项目的服务器端开发选择Java作为脚本语言,采用Spring Boot框架,采用Tomcat集群+Nginx负载均衡+Redis分布式搭建具有负载高、并发高特征服务器[5]。服务器架构如图3所示。
3.5数据调制设计
本研究采用全新的数据调制方案,在前述软硬件结构的基础上,介入了全新的SVM支持向量机技术,用于整个软硬件设备的关联和协同操作,通过该技术实现软件与硬件的关联,同时依靠支持向量机完成硬件反馈数据的筛选、规制以及实际数据反馈[6]。
本研究参照这种支持向量机的技术思维,设计了本研究的数据分割算法,依靠该思路进行数据均衡与数据调用,在面向大批量、不规整数据时,能够轻松自如的进行数据交互与数据共享。
4.应用前景
本研究相对目前已有产品具有安全性极高、节约能源资源、节约人力成本、自动化程度高等优点,其具有很好的经济效益和社会效益;基于视频识别和姿态采集技术构建川藏无人区可储电式道路危险驾驶监测警示通信护栏装置能够自动适应多种恶劣环境,适合于川藏地区的硬件自动化管理,所用技术先进,装置成本较低,适应性好,符合当今世界科技发展趋势,易于推广应用。
参考文献:
[1]曹亮,叶唐进,陶伟.川藏公路巴塘至拉萨段典型地质灾害危险性分析[J].地质与资源,2023,32(01):113-119.DOI:10.13686/j.cnki.dzyzy.2023.01.014.
[2]李铭,杨帆,吴佳鑫,刘苗.川藏公路柔性加固基层沥青路面结构经济性分析[J].西安工业大学学报,2022,42(05):480-485.DOI:10.16185/j.jxatu.edu.cn.2022.05.203.
[3]罗超.基于车路协同的城市交通姿态预警及调控技术研究[D].重庆交通大学,2014.
[4]李冰,徐秋景,曾凡菊. 自动控制原理[M].人民邮电出版社:, 201402.216.
[5]潘立智. 城铁车辆公路运输中的振动监测系统设计及研究[D].吉林大学,2018.
[6]Entropy; Studies from National University of Defense Technology Yield New Data on Entropy (Using Multidimensional ADTPE and SVM for Optical Modulation Real-Time Recognition)[J]. Journal of Technology & Science,2016.

 京公网安备 11011302003690号
京公网安备 11011302003690号


