



- 收藏
- 加入书签

基于改进粒子群算法的通信自寻回救援机器人
 打开文本图片集
打开文本图片集

摘要:针对救援车在搜救过程中时常出现因无线通信被阻断而失控的情况,本文设计了一种适用于小范围无线轮式救援机器人的通信自寻回系统模型。通过对比通信距离对信号的影响,测试多种材料的屏蔽率,检验出阻断通信的关键影响因素。采用非线性递减惯性权重和异步线性改变学习因子的策略对粒子群算法进行优化。围绕关键影响因素,利用改进后的粒子群算法,建立了通信自寻回系统模型。
关键词:PSO;Sigmoid函数
中国分类号:TP 自动化技术;计算技术 文献标识码:A
1引言
我国国土面积幅员辽阔,频发泥石流地震等地质灾害,如何迅速准确地开展幸存者救援工作是应对地质灾害的核心问题之一。救援机器人技术涉及多种先进技术领域,对未来的高新技术发展具有重要意义。近年来,随着救援机器人的应用广泛化,已有一些更先进的救援机器人被合理运用。
2基于无线通信技术的轮式救援机器人
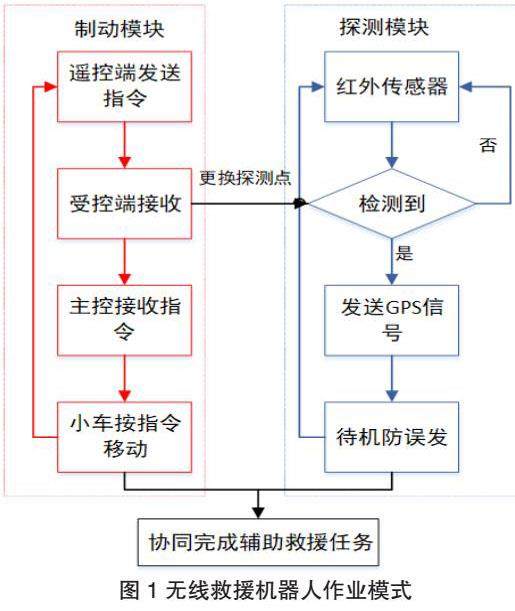
本文主要针对使用WIFI通讯系统[3]的轮式救援机器人来设计。该救援机器人作业方式如图1所示,由两大模块及四个子模块构成。制动模块及探测模块协同完成辅助救援的工作。针对其作业过程中常因无线通信被阻断而失控的情况,建立了基于改进粒子群算法的通信自寻回系统模型。
3基于改进粒子群算法的通信自寻回系统模型
3.1无线通信阻断因素分析
由于硬件结构未出现接触不良,因此本文对影响通信的两个变量即通信距离,及遮挡物材质做了单一变量实验。
对通信距离展开实验,通信模块理论最大通信范围在5.0km,而该救援机器人仅在半径为2.0km的范围内作业。我们在较为空旷的平地进行测试,从500m处开始每次递增100米直至2000m,且每个距离均从几个不同方向各连接25次通信模块,统计连接成功次数,从而得出通信稳定率。测试结果表明,在2.0km范围内通信稳定性均大于96%,由此可得,在此范围内通信距离与救援车通信异常现象无关。
对遮挡材料展开实验,将以下废墟中常见材质所制成的长板竖于遥控器与救援车之间,在每种材料测试中随机横向偏移遥控器和救援车的位置,从不同位置上25次连接通信模块,其中连接不稳定的频率即该材料的屏蔽概率。实验结果如表1所示。本文发现,以下材料均能对信号产生屏蔽影响。但同时可见,纯铁材质能够100%将信号屏蔽,而钢筋水泥混合物的屏蔽概率却只有28%。
综上,由实验数据可知,遮挡物的材质对通信模块稳定性有极大影响。同理可知,阻断无线通信的关键影响因素为高屏蔽性材料的遮挡范围及该范围遮挡物的未屏蔽率。围绕关键影响因素,本文提出一种基于轮式救援机器人的通信自寻回系统。
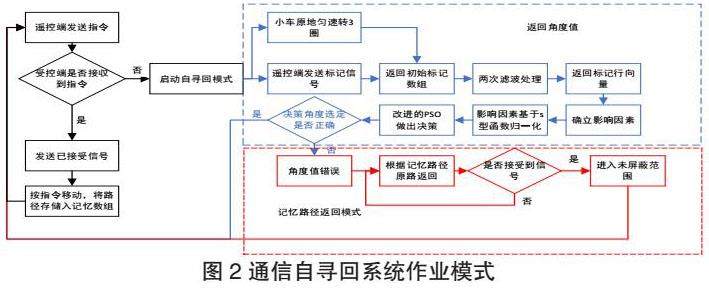
通信自寻回系统主要分为两个模块,即返回角度模块及记忆返回模块。返回角度模块为该系统的核心,力求在通信较稳定的范围内返回活动度最大的角度。记忆返回模块作为自寻回系统的辅助模式,可在返回角度值错误的情况下使救援车继续返回。二者相辅相成使通信自寻回系统更为稳定。具体流程如图2所示。
3.2返回角度模块
3.2.1数据获取及预处理
(1)返回未屏蔽范围:
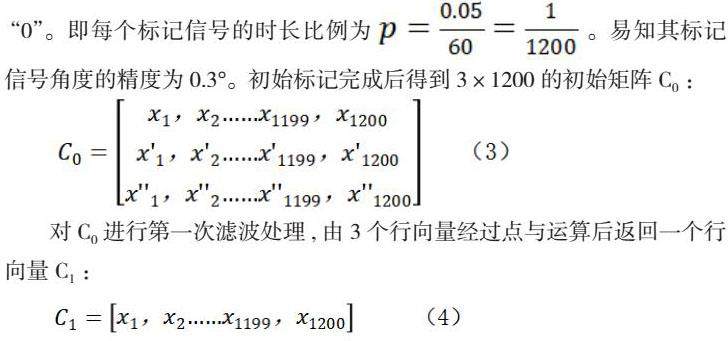
无线通信中,遥控端每发出一次指令,受控端收完毕后即返回一个已接收信号。当遥控端无法接收到此信号时,则启动通信自寻回系统。开启寻回系统后计时器开始计时180s, 在此时间范围内,控制车体在此时间范围内匀速自转三周,同时遥控端以间隔50ms不间断向受控端发送标记信号,直到计时结束。在受控端主控板串口通信程序中,每进入一次中断,即会得到一个未屏蔽标记“1”,若未收到标记信号,则得到一个屏蔽标记“0”。即每个标记信号的时长比例为。易知其标记信号角度的精度为0.3°。初始标记完成后得到3×1200的初始矩阵C0:
对C0进行第一次滤波处理,由3个行向量经过点与运算后返回一个行向量C1:
对其进行第二次滤波处理。将标记为0的元素其前3个及其后3个元素均化为0。且需注意在此数组中x1与x1200为相邻元素。即若x1=0则均等于0。返回降噪处理后的标记行向量C2。C2所代表的未屏蔽范围可用极坐标图直观表示,元素下标可转化为角度值,精度为0.3°,如图3。
3.2.2参数确立及基于Sigmoid函数的归一化处理
(1)影响因素确立
易知,在标记行向量C2中,某元素下标为n,则该元素代表的位置为n。因此,本文称该元素为位置n。
定义最佳位置的选取标准为:在该位置无线通信稳定的基础上,尽量不偏离原来的行驶路线。
根据阻断无线通信影响因素分析,本文将无线通信稳定与否的主要影响因素分别量化为可通信范围宽度w、范围未屏蔽率p。因此位置选择的主要评价因素为可通信范围宽度w、范围未屏蔽率p和与初始角度的偏差值d。
W、p、d具体定义如下:
位置n的宽度Wn定义为:位置n宽度向量C2的元素个数,其中宽度向量为标记行向量中截取出的,以位置n为中点,以距位置n最近的且大于4.5°的屏蔽范围为边界的向量。
位置n的未屏蔽率Pn定义为:宽度向量中0的个数与宽度向量的元素个数为比值。
位置n与初始角度的偏差值dn定义为:
(2)基于Sigmoid函数的归一化处理
sigmoid函数作为激活函数被广泛应用于神经网络和支持向量机算法中,归一化处理输入数据与期望值。Sigmoid函数连续、光滑,严格单调,是良好的阈值函数。其表达式为:
由于W、p、d量级相差较大,且根据最佳位置选取标准的定义,对范围宽度及与初始角度偏差值的评价函数应连续、严格单调、变化较为平滑,且应近似为阈值函数。因此本文对w和d进行基于sigmoid函数的归一化处理,将w、d分别通过式2映射出宽度评价参数w’,与初始角度的偏差评价参数d’。
3.2.3基于非线性递减惯性权重及异步线性改变学习因子改进的粒子群算法
粒子群算法最早是由两名美国的科学家基于群鸟觅食,寻找最佳觅食区域的过程所提出来的,作为一种智能算法,PSO模拟的就是最佳决策的过程。群鸟在觅食的过程当中,每一只鸟的初始位置都处于随机状态,当然也不知道最佳的觅食点在何处,并且每只鸟的飞行方向也是随机的。可以认为,在觅食的初期,鸟群的运动轨迹都是杂乱无章的。随着时间的推移,处于随机位置的鸟类通过群内的相互学习、共享觅食信息,每一只鸟在每一次的觅食过程中结合自己的经验和同伴传送的信息估计目前所处的位置能够找到食物有多大的价值,即通过每个粒子由适应度函数调整粒子至较优的区域以搜寻到问题的最优解。
PSO的标准步骤为:PSO初始化一群随机粒子,粒子在N维空间位置和飞行速度分别表示N维矢量。每个粒子都有一个由目标数确定的适应值,通过每个粒子的适应度值,找到其个体最好位置值,从而得到整个群体中的最好的位置值以及当前位置, 通过迭代找到最优解, 在每次迭代中粒子通过值和来更新自己。
标准的粒子群算法容易陷入局部最优值和后期震荡和收敛速度慢。而惯性权重(w)控制了全局搜索能力和局部搜索能力的平衡;“个体认知”学习因子 、“群体认知”学习因子c2分别决定全局搜寻能力及局部收敛速率。标准粒子群算法公式如下:
于是引入非线性递减惯性权重(w)和异步线性改变学习因子(c1,c2)的改进粒子群算法。将w设置为变量, 通过非线性递减权值调整粒子,同时使种群中所有粒子在早期阶段c1取值较大;在后期阶段c2取值较大。具体如下:
(1)具有非线性递减惯性权重粒子群算法
本文使用非线性递减权值策略将惯性权值w设置为变量, 通过非线性递减权值实现粒子的调整,(当 n=1时, 即Shi提出的线性递减惯性权重策略), 其公式如下:
式中wmax、wmin分别表示w的最大值和最小值,i表示当前的迭代次数,imax表示最大迭代次数,n指数值。
(2)异步线性改变学习因子策略
由标准PSO公式(7)可知, 控制了“个体认知”部分, 即粒子自身之前的飞行经验对之后飞行方向的影响, 控制了“群体认知”部分, 即种群中所有粒子的飞行经验对每个粒子之后飞行方向的影响. 在标准粒子群算法中,大部分文献中研究人员提出其取值范围在[0,4]区间内。学习因子在过程中采用不同的变化策略称之为异步变化. A.Ratnawecra 提出了一种异步线性改变学习因子的策略, 该策略是在算法早期阶段,取值较大而 取值较小, 使粒子能够更多地向自我的学习以此加强全局搜寻能力;在搜寻的后期阶段取值较大,使粒子能够快速收敛到全局最优解。学习因子的更新公式如下:
3.3记忆路径返回模块
在角度返回模块的基础上,若返回角度β值错误。则启动记忆返回模式。易知原路返回即为最便捷的寻回通信信号方式,但由3.2.2中与初始角度偏差评估标准可知,距离初始角度近为佳,即尽量做到不原路返回,可增大搜救范围,提高救援效率。
由返回错误即可推知无相对可行的未屏蔽范围,此情况极大概率可能为记忆路径被坍塌物阻断。而理论上车体原路返回时,必定可行驶到未被阻断的通信稳定区域。针对此情况,备用方案记忆路径返回模式开启。
在车体正常通信阶段,我们在车体主控端设立一个容量足够大的2维数组2×n矩阵A0,配合编码器及陀螺仪,将每次指令的行驶方向和距离存储进该数组。在记忆返回模式启动后,将A0矩阵变换为记忆路径数组A1,将记忆路径逆顺序执行,直到通信串口中断可稳定触发。
鉴于记忆路径上极大可能存在如坍塌物等意外障碍,因此在车体的前段均匀分布两个超声波传感器分别为S1、S2,用于对前方的障碍物进行多角度检测;在车体两侧分别安装一个超声波传感器分别为S3、S4,用以检测车体两侧的障碍物,从而避免碰撞造成车体的损坏以及非信号屏蔽材质阻挡救援车行驶的问题。
超声波传感器的工作原理是发出超声波,通过记录超声波遇到障碍物再返回的时间,计算车体距离障碍物的距离。当障碍物距离小于一个阈值时,救援车进行避障。
当救援车来路出现障碍物,救援车处于无法通信的情况时,设置一个两行矩阵A3。设置S1、S2、S3、S4的安全阈值分别为D1、D2、D3、D4。设S1、S2、S3、S4检测到的障碍物距离分别为d1、d2、d3、d4。若d1<D1,则说明车体左侧有障碍物,车体将先向后退一段距离,再向右转一定角度向前行驶,重复上述过程直到d3>D3,记录角度和路程信息于A3。根据A3可通过变换得到新的矩阵A4。车体依据A4矩阵绕开障碍物回到原路。若d2<D2,则说明车体右侧有障碍物,同理。从左侧绕开障碍物。若D1、D2同时小于安全阈值,则向左向右转一定角度,比较两次(d1+d2)的值,选择(d1+d2)的值大的方向绕开障碍。
3.4模型决策效果验证
为验证通信自寻回系统模型决策效果的优劣,本文在pc端仿真调试返回角度模块的决策过程。将由救援机器人向上位机发送的初始信号所构成的数据集输入神经网络中进行训练,再将预测生成的布尔型数组模拟救援机器人向上位机发送的信号。经过两次滤波处理,得到标记行向量,所代表的未屏蔽范围如图4所示。
在参考大量文献后,本文将改进的粒子群参数做出如下合理设置。种群规模为N=20,最大迭代次数T=100。惯性权重的最大值为wmax=0.9,惯性权重最小值为wmin=0.3。群体学习因子的最大值为1.8,最小值为0.8。个体学习因子的最大值为1.8,个体学习因子的最小值为0.8。
评价各粒子的初始适应度,并保留群体最优历史角度和个体最优历史角度。在历史最优角度中找到其中的最优角度,作为全局最优解的初值。更新各个粒子的速度和位置,并计算更新后粒子的自适应值,更新个体最优角度及群体全局最优角度。重复上述步骤至满足迭代结束条件。迭代结果如图5。
4 模拟环境调试
在模拟环境调试中,本文基于优化后的机械结构模块及无线通信模块重组救援机器人模型,在模拟环境中,将重组之前的机器人模型和重组之后的分别测试50次,统计机器人运行异常的次数,如图6所示。易得,优化后的救援机器人模型突发事故率有效较低了78%。
5小结
本文对基于无线通信技术的轮式救援机器人模型的缺陷做出如下优化:
针对传统的轮式机器人机械结构无法满足较为崎岖的地面状况,本文基于麦弗逊独立悬挂结构建立动力模型。通过力与悬挂位移的关系,使用matlab软件分析其防震性能。
针对救援车时常出现因无线通信被阻断而失控的情况,本文通过实验法对比通信距离对信号的影响,测试多种材 料的屏蔽率,检验出阻断通信的主要影响因素。围绕影响因素提出一种基于改子群算法的通信自寻回方法。
将模块联合调试后,经模拟环境测试,本文重组出的救援机器人模型的突发事故率有效降低78%,基于无线通信技术的新型救援机器人模型确实有效,为相关研究方向提供了一定的参考与借鉴价值。
参考文献:
[1]毛磊,李争祥,陈立钊.现代无线通讯技术发展现状和趋势[J].电子技术与软件工程,2021(10):23-24.
[2]丁亚男,张旭,徐露.基于UWB的室内定位技术综述[J].智能计算机与应用,2019,9(05):91-94.
[3]李培煊,强蕊.基于WiFi的煤矿井下应急救援无线通信系统的研究[J].中国安全生产科学技术,2011,7(04):139-143.
[4]朱斐然. 基于现代应急抢险的全地形救援车设计研究[D].大连理工大学,2019.DOI:10.26991/d.cnki.gdllu.2019.001370.
作者简介:赵雨茜(2002-) , 女,汉, 江苏南京人,学历本科, 研究方向:机器人应用
通讯作者:石建全(1990.4=) ,男,汉,博士研究生,讲师,研究方向:工业智能软测量及控制技术、数据驱动与数据挖掘技术、人工智能、电力电子等。
基金项目: 江苏省大学生创新创业训练计划项目(202211276116Y)

 京公网安备 11011302003690号
京公网安备 11011302003690号


