



- 收藏
- 加入书签

面向智能车间的多车型AGV调度系统集成和路径规划研究
 打开文本图片集
打开文本图片集
摘要:智能车间中的多车型自动导引车(AGV)系统在现代制造业中扮演着重要的角色,因为它们可以提高生产效率和资源利用率。本文探讨了多车型AGV系统的集成和路径规划,以优化车辆的调度和路径选择。首先, 对多车型AGV路径规划方法进行了概述,包括集中式规划和分布式规划,以及不同的路径规划算法和策略。接着, 重点关注了面向智能车间的多车型AGV调度系统的集成研究,包括硬件和软件的集成,协同策略的设计以及性能评估与优化。最后, 讨论了多车型AGV路径规划的关键问题,包括路径规划算法和性能优化。本文的研究为实现智能车间的高效生产和资源管理提供了有力支持。
关键词:多车型自动导引车;智能车间;路径规划
1 引言
多车型AGV(自动导引车)系统是现代制造业中的一个重要技术,它为智能车间和物流系统的优化提供了关键性的解决方案。随着制造业日益自动化和智能化的趋势,多车型AGV系统成为了提高生产效率、减少人力成本、提高生产质量的有力工具。这一趋势的背后是不断增长的市场需求,以及新兴技术的快速发展,如物联网、人工智能、自动化控制等。多车型AGV系统的研究背景在于解决制造业中常见的挑战,包括复杂的生产流程、资源调度问题以及生产线上不同车型之间的协同工作。传统的生产线往往需要大量的人力来处理这些问题,而多车型AGV系统的引入可以显著减少人为干预,提高了制造的柔性和自适应性。这对于在快速变化的市场中保持竞争力至关重要。
2 多车型AGV路径规划方法的概述
2.1 多车型AGV的路径规划分类
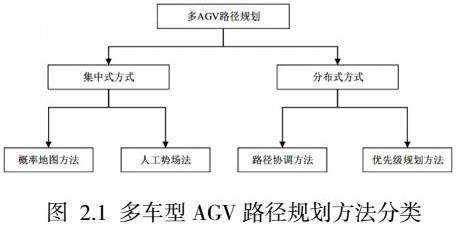
在多车型AGV的路径规划中,每辆AGV都需要有一个无碰撞路径,以从其起始位置移动到目标位置,同时还需要确保不会与其他AGV发生冲突。这个技术借鉴了移动机器人路径规划技术的思想。多AGV路径规划可以被分为两大类方法:一种是集中式方法,另一种是分布式或解耦式方法,这些方法的区别在图2.1中有所展示。
在集中式方法中,通常的方式是将多个AGV视为一个具有多自由度或者以复杂方式运作的单一AGV进行规划。尽管这种方法可以提供最佳解决方案,但它面临一个关键问题,即随着多车型AGV系统的规模扩大,计算所需的时间会呈指数级增长,因此,随着AGV数量的增加,问题变得越来越难以解决。在分布式方法中,不同的AGV可以相互合作,将一个任务分解为多个子任务,并根据各自的特点来完成这些子任务,从而实现整体任务的完成。为了降低计算复杂度,分布式方法将问题分为两个不同的阶段:运动协调和路径寻优。虽然分布式方法的计算速度比集中式方法快得多,但它无法保证获得完全最优的解决方案。
2.2 多车型AGV集中式规划
2.2.1 概率地图法
概率地图方法通过构造规划空间的概率地图,将传统的连续空间寻优问题转换为拓扑空间内的寻优问题。概率地图的数学表达式以无向图G的形式表示,它由采样位姿点集V 与边集 E 两部分组成,其定义为
为了确保构建的概率地图与实际应用场景相符,以满足生产过程的需求,在构建地图时需要考虑以下几个关键方面:
(1)概率地图应准确反映物理空间中各物体要素的空间位置信息,特别是它们之间的相互关系。这有助于确保路径规划时考虑到物体之间的互动和约束。
(2)在保证概率地图能够支持AGV的所有运输任务的前提下,尽量创建简化的地图,以减少存储空间占用并提高路径规划的计算效率。
(3)构建的概率地图应该符合实际常识,避免规划的最佳路径在实际运行中出现不必要的绕行。
概率地图方法在工业机器人领域表现出色,它为多工业机器人提供了有效的碰撞避免策略、动态调整运动序列优先级的方法以及改进的A*算法。这些方法成功地实现了多机械臂系统的协调无碰撞运动规划。然而,当涉及到移动机器人,特别是AGV数量逐渐增多时,计算效率会急剧下降。而且,智能车间的环境比工业机器人的工作环境更加复杂,因此构建相关地图变得更加具有挑战性。这些因素共同导致了概率地图法在智能车间中的多车型AGV路径规划中存在一定的限制。
2.2.2 人工势场法
人工势场法是一种路径规划方法,最早由Khatib于1986年提出。其基本思想是在目标点周围创建一种吸引力场,同时在障碍物周围创建一种排斥力场。这两种场的共同作用使AGV向目标点前进,同时避免碰撞障碍物。在这个方法中,AGV受到引力和排斥力的影响,以沿着合适的路径达到目标。
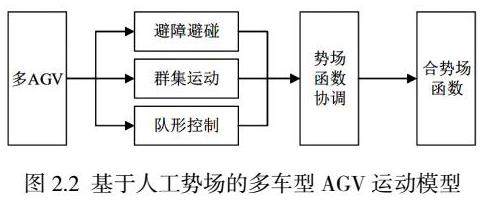
基于人工势场的多车型AGV运动可以分为三个主要模块,即避免障碍物和碰撞、群集运动以及队形控制。这些模块的协同作用可在图2.2中看到。避障和碰撞模块通过斥力场来确保AGV不会与障碍物发生碰撞,群集运动模块用于实现多个AGV之间的协同移动,而队形控制模块则有助于维持AGV之间的适当队形。这种方法通过模拟物体之间的吸引和排斥效应,为多车型AGV的路径规划提供了一个有力的框架。
如图示所示, 研究了三个关键模块,它们涉及AGV与障碍物的相互作用、AGV与目标点之间的势场,以及不同AGV之间的互动。 的目标是协调这些势场函数,以创造一个整体的合力场函数,从而有效地控制多车型AGV的运动。虽然人工势场法在多机器人编队控制中表现出色,例如,已有文献利用这一方法解决了多机器人队形形成的问题,它的结构简单、易于计算,适合于多机器人的实时控制。但在制造车间中,AGV主要用于物料运输,每个AGV需要不断在货架和各工作站之间来回运行。因此,整个AGV车队的路径非常复杂且难以预测,不适合传统编队控制方法。此外,人工势场法也面临一个挑战,那就是随着AGV数量的增加,计算所需时间会大幅增加,这使得它在实际应用中的可行性受到限制。
2.3 多车型AGV分布式规划
2.3.1 路径协调法
在路径协调方法中,AGV之间通过相互协作来防止冲突和碰撞,这个方法也可以称为交通管制法。通常情况下,首先独立计算每辆AGV的路径,而不考虑其他AGV,然后通过调整每辆车的速度分布来避免碰撞的发生。例如,如果两辆AGV沿着相同的路径或轨迹移动,那么其中一辆AGV将减慢速度,以避免与另一辆AGV发生碰撞。因此,路径协调法的核心是采用一系列协调策略,以确保AGV之间不发生冲突。各种可能的冲突情形可以参考图2.3。
实际上,这种路径协调方法主要适用于有轨式多车型AGV系统,如采用光带导航、磁条导航、或者二维码导航等导航方式的系统。这三种冲突情况在有轨式AGV中很常见。因为所有AGV都在统一规定好的轨道或路径上运行,通常采用一些协调策略来避免这些冲突情况。例如,对于路口冲突,可以采用等待策略,即一边的AGV等待另一边的AGV通过后再继续前进;对于追赶冲突,可以采用匀速策略,即所有AGV都以一定匀速行驶;而对于相向冲突,通常采用单向行驶策略,即所有AGV在轨道上行驶时都沿着同一方向前进,每个轨道上只允许按照规定的方向行驶。
2.3.2 优先级规划法
目前,在分布式规划方法中,广泛采用的一种策略是优先级规划。相对于前述方法,优先级规划在智能制造车间中显示出独特的优势。其基本思想是为每辆AGV分配唯一的优先级,并按照从最高优先级AGV到最低优先级AGV的顺序进行路径规划。在每次规划中,不仅为当前优先级最高的AGV制定最佳路径,还要确保避免与之前已规划的更高优先级AGV之间的碰撞和冲突。核心思想是较低优先级的AGV始终避让高优先级AGV,从而解决了车辆之间的冲突。
3 面向智能车间的多车型AGV调度系统集成研究
3.1 多车型AGV系统硬件和软件集成
在面向智能车间的多车型AGV调度系统中,硬件和软件集成是至关重要的。硬件方面,需要确保不同类型的AGV能够有效地与系统进行通信和协作。这包括传感器、执行器、导航设备等硬件组件的集成,以便AGV能够感知环境并执行任务。此外,硬件的可扩展性也需要考虑,以便系统可以适应不断变化的生产需求。软件集成方面,各个AGV的控制系统需要能够协同工作,以实现整体调度和路径规划。这需要统一的通信协议和软件架构,以确保各个AGV之间可以共享信息和协调行动。此外,集成还涉及到系统的监控和管理软件,以便实时跟踪AGV的状态、任务进度和性能。
3.2 调度系统的协同策略
多车型AGV调度系统的协同策略是确保各个AGV之间协作和任务分配的关键因素。这涉及到任务的分配、优先级设置、任务调度和冲突解决。协同策略需要根据生产需求和车型特性进行精心设计。任务分配是确保每个AGV得到适当任务的关键。这需要考虑任务的紧急程度、AGV的可用性和距离等因素。同时,为了提高系统的效率,可以采用动态任务分配策略,以便在任务变化时重新分配任务。优先级设置是为了处理不同任务之间的竞争关系。通过为任务和AGV分配优先级,可以确保高优先级任务优先完成,从而满足紧急生产需求。任务调度需要考虑AGV之间的协同行动。这包括规划最佳路径、避免碰撞和冲突,以确保任务的高效完成。协同调度还可以考虑车队的协同工作,以最大程度地减少空闲时间和提高资源利用率。
3.3 性能评估与优化
在面向智能车间的多车型AGV调度系统中,性能评估和优化是不可或缺的环节。性能评估旨在监测系统的运行情况,以便及时发现问题并作出调整。这包括对AGV的运行效率、任务完成时间、资源利用率和系统可用性进行评估。性能评估还需要考虑系统的稳定性和可靠性,以确保在生产过程中不会出现故障或停机情况。这包括对硬件设备的监控和维护,以及对软件系统的更新和优化。性能优化是确保系统在生产过程中保持高效运行的关键步骤。这可以通过调整协同策略、路径规划算法、任务分配方法等来实现。优化还可以考虑AGV的维护计划,以延长设备的使用寿命和降低维护成本。
4 面向智能车间的多车型AGV路径规划研究
4.1 路径规划算法研究
多车型AGV路径规划是智能车间的核心组成部分,它直接影响到生产线的效率和资源利用率。在路径规划算法研究中, 探索各种路径规划方法,包括经典的A*算法、Dijkstra算法、以及近年来的启发式算法和深度学习方法。 致力于找到最适合不同情境的路径规划算法,以确保AGV能够在复杂的车间环境中高效导航,并避免碰撞和拥堵。
4.2 多车型AGV路径规划策略
多车型AGV系统通常包括不同类型和尺寸的AGV,每种车型具有不同的性能和运动特性。在路径规划策略的研究中, 考虑如何有效地协调这些不同车型的运动,以满足不同任务的需求。这包括路径的选择、速度调整和任务分配,以确保每种车型都能够在系统中发挥其最佳性能。
4.3 性能优化和实时适应性
性能优化和实时适应性是路径规划中的重要课题。 研究如何通过不断监测车间环境和车辆状态来实时调整路径规划,以应对突发情况和变化的任务需求。性能优化也包括了路径的最优选择、任务的优先级分配以及资源的有效利用。 追求在不断变化的智能车间环境中实现路径规划的高效性和实时适应性,以提高生产线的生产力和灵活性。
结语
多车型AGV系统在智能车间中的应用为现代制造业带来了巨大的机遇和挑战。通过本文的研究, 强调了多车型AGV系统的路径规划和调度的重要性,以实现高效的生产和资源管理。集中式和分布式规划方法都具有各自的优点和局限性,需要根据具体应用场景进行选择。系统的硬件和软件集成是确保系统正常运行的关键因素,而协同策略的设计可以优化车辆之间的协作和资源利用。性能评估和优化是持续改进系统的关键步骤,以满足不断变化的需求和挑战。未来的研究应该进一步探讨更智能的路径规划算法和实时适应性策略,以应对制造业的不断发展和变化。多车型AGV系统的不断创新将为智能车间的成功实施提供更多可能性。
参考文献
[1] 陆泓洁.移动机器人路径规划与车辆调度算法研究[D].华南理工大学,2021.
[2] 吉红,赵忠义,王颖丽,等.复杂环境下多AGV路径规划与调度系统研究[J].机械设计, 2023.
[3] 陈香玲.电商物流分拣中心多AGV调度与路径规划研究[D].西南交通大学,2021.
[4] 李昆鹏,刘腾博,阮炎秋.半导体生产车间智能AGV路径规划与调度[J].计算机集成制造系统, 2022, 28(9):11.
[5] 苑明海,李亚东,裴凤雀,等.智能制造车间AGV与机器双资源集成调度问题[J].中南大学学报:英文版, 2021, 28(8):13.
[6] 李昆鹏,陈学磊,韩雪芳.光伏电池片生产车间智能物流调度研究[J].工业工程与管理, 2022, 27(6):11.
[7] 姚宝珍,张晋,时彬,等.考虑路径长度与冲突的AGV停车场停车位分配方法[J].交通运输研究, 2023, 9(4):72-83.
[8] 聂子翔.仓储配送中心多AGV系统的路径规划研究[D].宁夏大学,2022.

 京公网安备 11011302003690号
京公网安备 11011302003690号


