



- 收藏
- 加入书签

基于人工智能的无人驿站创新系统设计
 打开文本图片集
打开文本图片集
摘要: 为了推动末端物流的智能升级,降低快递驿站人工成本,提高取件效率本项目基于物联网、数据分析、人工智能和机器人的投入应用,设计出一款可以24小时随时取寄的无人驿站系统。利用物联网模块(ESP8266)连接云端服务器,可供客户实时获取记录快递状态。采用STM32F407单片机、激光雷达、GM65模块、OpenMV和机械臂打造取货机器人,全程无人干预不仅大幅降低人工成本,还减少了快件丢失和损坏问题。
关键词: 无人驿站;单片机;物联网;机器人;OpenMV
引言:随着我国经济的高速发展,互联网和网上购物已经成为我们生活中不可分割的一部分,快递业务逐渐增长的同时加快了快递驿站的转型升级。传统驿站的场地租金和人工费用让很多驿站投资者难以承担,并且人口集中区域易出现取件高峰拥堵和驿站爆仓现象。建立无人驿站可以大大降低人工成本,24小时自助取件能够有效缓解高峰期排队拥挤状况,并且一站式扫码取件的方式能够有效提高取寄快递的效率。
一、研究内容
无人驿站采用一人一码的取件方式。由云端数据库存储用户及快递信息、在扫描用户身份码后通过数据分析系统核验身份码和查询快递信息。取货机器人通过物联网模块获取待取快递放置信息和快递二维码信息,伴有移动伸缩底盘可实现抓取高货架层的快递。机器人结合了多种传感器进行稳定行驶,通过人工智能规划路线并自主避障到指定货架下。最后通过视觉模块和机械臂对快递进行识别抓取,拿到快递后送给客户完成取件工作。
二、研究原理
(一)取货机器人的设计原理
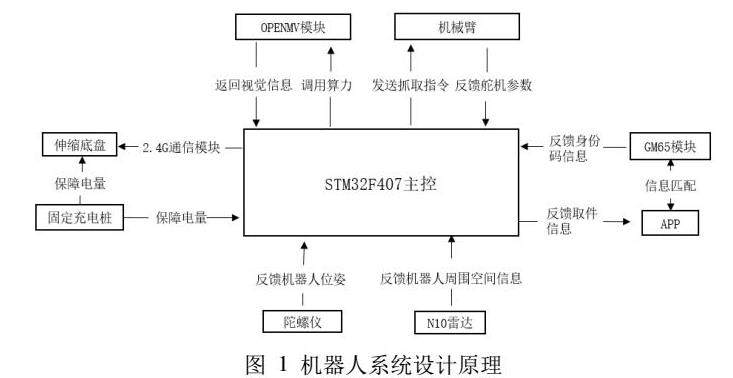
当用户出示身份码后,通过GM65模块扫码由物联网模块上传数据库进行信息核对并查找快递信息,若有待取快递则向STM32F407单片机反馈取货信息,核对失败则APP通知客户无待取快递。当货物在高层货架时,取货机器人则会控制伸缩底盘自主移动来进行取货。机器人拿到货物后自主规划路线送至取货窗口,用户即可取走快递,取货机器人整体系统设计原理如图1所示:
(二)视觉抓取模块设计原理
在驿站仓库,通过OpenMV利用二值化法识别黑色引导线进行循迹和人工智能规划路线和判别不同路口到达指定货架,并在GM65模块确定目标快递后,摄像头在经图像识别将获取到的三维对象进行实例分割,反馈信息给单片机进行运动学逆解,采用六自由度机械手臂,并建立出相对于机械臂底座的世界坐标。OpenMV通过深度神经网络处理生成抓握姿态并进行评估,通过算法进行模型匹配,生成最佳抓取位置方案,计算出机械臂每个电机需要旋转的角度,驱动机械臂各个关节一步步到达合适位置,精准抓取快递包裹。
(三)取货机器人和伸缩底盘协作取件的设计原理
单片机获取货物存放的货架层数信息判断是否需要调用移动伸缩底盘。如需调用,通过2.4G通信模块调用移动底盘。单片机通过发送指令来控制移动底盘的自由移动,通过OpenMV视觉模块和人工智能技术循迹到达指定货架。当机器人来到指定货架前,发送指令控制伸缩底盘的伸缩功能使取货机器人升高到指定货架层实施取货作业。机械臂拿到快递放置好后,机器人发送指令控制伸缩底盘降低到初始高度然后移动到客户等待的取货窗口,送货完毕后本次协作结束,取货机器人和移动底盘分开,等待下一次的协作指令。
(四)自主避障模块原理
取货机器人在移动时使用激光雷达模块避障,以发射激光束探测目标的位置、速度等特征量的雷达系统,这三种技术的结合,激光雷达最大的优势就是“精准”和“快速、高效作业”。使用激光雷达模块在快递驿站这种复杂环境中会更加精准识别障碍物,激光雷达模块首先扫描机器人附近三维数据和信息,将数据传输给STM32F407单片机,通过计算得到方位和障碍物的距离信息,单片机会根据这些数据来判断取货机器人是否需要避开这个降碍物,如果需要避开障碍物,会由单片机经过计划最优路线后控制底盘的四个电机避开障碍物。
(五)电力续航系统原理
取货机器人和伸缩地盘配有依据其底盘相匹配的固定充电桩,在运行至电量不足或待机时,会启动自动返航程序来运行至固定充电桩来进行充电,其内部开关电源将交流电转换成直流电来为电池充电,在充电至100%后会离开充电桩继续进行工作运行状态,以此来保证其24小时正常运作。
(六) 软件部分
1.使用FreeRTOS,多核运行,实现多任务管理和任务调度,提高系统的性能和稳定性。根据任务的实时要求对任务进行优先级排序。提高应用程序对时间关键事件的响应能力。
2.利用视觉惯性SLAM(Simultaneous Localization and Mapping)算法,根据传感器的数据,实时估计自身的位置和姿态,以及构建三维地图。利用A*、Dijkstra、RRT等算法,根据地图信息和目标位置,规划出全局最优或近似最优的路径,同时考虑安全性、平滑性等因素。
3.无人驿站APP利用移动设备上的应用程序,与无人驿站进行交互。APP的目的是为了提高用户的取件效率、安全性和便利性,同时也可以实现一些创新和有趣的功能。
4.OPENMV识别颜色利用find_blobs算法,通过阈值编辑器对图像中的黑色给定一个阈值来实现对黑色引导线的精确识别,通过色块的位置来判断小车的走向,进而实现基本寻迹功能。并利用神经网络算法对货物图像信息和寻迹素材进行训练,从而实现对货物以及十字路口的识别。摄像头在识别到货物后可以获取到平面图像中的二维坐标,利用参照物进而获取到货物的三维坐标。
三、结语
本文以无人驿站为研究对象,是利用物联网、移动互联网、人工智能等技术,实现快递驿站的无人化办公和交付交互的设施,它具有高效、安全、便利、智能等特点,是快递末端交付的一种创新模式。本文的研究虽然取得了一些成果,但仍存在一些不足之处,视觉算法需要进行更多的优化,无人驿站的未来发展前景需要在今后的研究中进一步完善和改进。
参考文献
[1]汪洋,孙剑.菜鸟驿站无人配送车物流路径规划算法实证研究[J].物流科技,2022,45(16):24-26+30.DOI:10.13714/j.cnki.1002-3100.2022.16.007.
[2]李琪璐,路彤,李明宇等.基于机器视觉的颜色分拣机器人设计[J].单片机与嵌入式系统应用,2022,22(12):54-57.
[3]白振伟,严富威,袁培海等.基于嵌入式机器视觉智能果实分拣机器人设计与试验[J].智能化农业装备学报(中英文),2023,4(03):61-70.
[4]林平伟,黄程新,陈英杰等.图书自动分拣机器人[J].物联网技术,2023,13(02):147-149+153.DOI:10.16667/j.issn.2095-1302.2023.02.040.
[5]王昱琪,熊绍托,齐岩松等.物流分拣机器人设计[J].科技风,2022(36):1-3.DOI:10.19392/j.cnki.1671-7341.202236001.
[6]毕思,张冲.一种快递分拣机器人工作站的控制系统设计[J].南方农机,2023,54(02):126-128.
[7]张英哲,杨旗.基于视觉的机器人自动分拣[J].机械工程与自动化,2023(03):165-167.

 京公网安备 11011302003690号
京公网安备 11011302003690号


