



- 收藏
- 加入书签

基于Yolov5s算法和蚁群算法的无人机森林火灾检测系统设计与优化
 打开文本图片集
打开文本图片集
摘要:本文提出了一种基于Yolov5s算法和蚁群算法的无人机森林火灾检测系统,该系统利用无人机载荷搭载的摄像头获取森林区域的实时图像通过Yolov5s算法进行目标检测实现对火灾烟雾等异常情况的实时监测。同时采用蚁群算法进行路径规划优化无人机的飞行路线提高了系统的效率和准确性,实验结果表明该系统具有较高的火灾检测准确率和飞行路径优化效果可在森林火灾监测和应急救援中发挥重要作用。
关键词:无人机;森林火灾检测;Yolov5s算法;蚁群算法;路径规划
引言:
森林火灾是一种具有严重破坏性的自然灾害不仅给生态环境造成巨大损失还威胁人们的生命和财产安全,本文旨在设计一种基于无人机的森林火灾检测系统结合Yolov5s算法和蚁群算法实现对森林火灾的及时监测和路径优化,Yolov5s算法是一种高效的目标检测算法具有较高的准确性和实时性适用于处理森林火灾监测中的图像数据,蚁群算法是一种模拟蚂蚁觅食行为的优化算法可以有效地解决路径规划问题优化无人机的飞行路径[1]。
1 无人机森林火灾检测系统设计
无人机(UAV)是现代森林火灾监测系统的核心组件之一其在火灾预防和应对中发挥着重要作用,这些无人机通常是通过遥控或预先设定的航迹进行飞行的无人飞行器,它们具有灵活性和机动性能够在森林茂密的地区进行低空飞行并且能够实时收集森林火灾相关的信息,为了完成这些任务无人机可能会配备各种载荷包括但不限于红外线传感器、烟雾探测器、高清摄像头等。
载荷是安装在无人机上的设备用于收集森林火灾相关的数据和信息,这些载荷的类型多种多样其中包括红外线热成像仪用于检测火灾的热点,烟雾传感器用于检测烟雾,摄像头用于实时监视和图像记录等,通过这些载荷无人机能够提供多种数据类型包括红外图像、视频流和其他传感器数据帮助监测中心和相关机构及时发现和应对火情[2]。
地面控制站是用来控制无人机飞行并传输数据的基地,操作员可以通过地面控制站实时监视无人机的位置、状态和飞行路径并根据需要进行调整,此外地面控制站还负责与无人机之间的通信和数据传输,操作员可以通过地面控制站发送指令给无人机,例如改变飞行高度、前往特定区域进行监测等,地面控制站的稳定性和高效性对于确保无人机飞行任务的成功执行至关重要。
监测中心是系统的数据接收、处理和分析中心,它接收来自无人机和地面控制站的数据并进行实时或离线的分析,监测中心利用这些数据来识别潜在的火灾迹象如烟雾、热点等并通过预先设定的算法进行火灾检测和预警,一旦检测到火情,监测中心将及时通知相关部门以便他们采取适当的行动如派遣消防队伍进行扑救,监测中心的高效运行对于及时发现和应对森林火灾至关重要有助于最大程度地减少火灾造成的损失。
2 Yolov5s算法在火灾检测中的应用
2.1快速检测与定位
Yolov5s算法在火灾检测中的一项重要优势是其卷积神经网络的快速检测与准确定位能力,这个算法通过多层次的卷积操作能够在图像中迅速识别并定位火灾、烟雾等异常目标,其网络结构设计精良允许在实时监测场景中快速捕获有关火灾的目标位置信息,卷积神经网络的优势在于能够有效地提取图像中的特征从而实现对目标的快速识别,Yolov5s通过使用多层卷积进行目标检测使其在处理大规模图像时具有较高的处理速度,这使得该算法非常适用于需要及时响应的火灾监测场景为灾害管理提供了强有力的工具[3]。
2.2适用于无人机监测
Yolov5s算法的轻量级特性使其成为无人机实时监测任务的理想选择,由于无人机的资源受限需要在有限的计算能力和存储空间内完成目标检测任务,Yolov5s的轻量级设计不仅降低了无人机系统的负担而且保持了高效的目标检测性能,无人机搭载Yolov5s算法能够在空中对广阔的区域进行快速而准确的火灾检测。这为监测效率的提高和监测范围的扩大提供了可能性,通过实时传输检测结果,相关部门可以更快速地采取行动有针对性地应对火灾威胁。
2.3火灾预警与救援支持
Yolov5s算法不仅限于火灾的检测更为重要的是其在火灾预警和救援方面的支持。通过实时监测和快速定位Yolov5s能够及时向相关部门发送火灾预警信息。这为启动紧急救援行动提供了宝贵的时间最大程度地减少火灾可能带来的损失。无论是在城市还是偏远地区Yolov5s算法的火灾预警与救援支持都能够加强应急响应系统,从而算法在保障人们的生命安全和财产安全方面发挥了关键作用。通过整合Yolov5s算法火灾管理部门能够更有效地规划和协调灾害响应策略提高灾害管理的整体效率
3 蚁群算法在路径规划中的优化
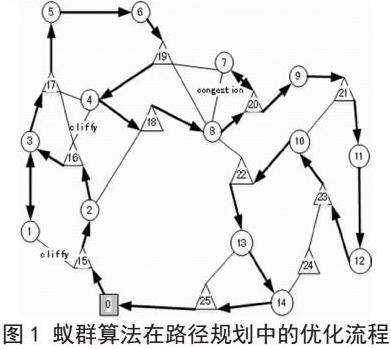
蚁群算法(Ant Colony Optimization,ACO)是一种模拟生物行为的启发式算法,其灵感来源于蚂蚁寻找食物时释放信息素的行为,这种算法通过模拟蚂蚁在搜索食物时的行为方式利用信息素和启发式信息的相互作用来实现对路径的优化,在蚁群算法中蚂蚁会沿着路径随机移动并在其走过的路径上释放一种称为信息素的化学物质[4]。当蚂蚁发现食物并返回到蚁巢时会加强对路径的信息素沉积,从而增加该路径被其他蚂蚁选择的概率,而在路径选择过程中蚂蚁更倾向于选择信息素浓度较高的路径同时也受到启发式信息的影响,例如距离或者路径的特性等,蚁群算法在路径规划中的优化流程图见图1。
在无人机飞行路径规划中蚁群算法可以被用来帮助无人机选择最优的飞行路径,无人机需要在监测区域内覆盖尽可能多的区域同时最小化能量消耗和飞行时间,蚁群算法可以通过在监测区域内模拟蚂蚁的行为寻找最优的路径来实现这一目标,无人机飞行路径规划的过程可以分为两个阶段:信息素更新和路径选择。在信息素更新阶段无人机在监测区域内进行一次飞行并根据监测结果更新路径上的信息素浓度。而在路径选择阶段无人机根据信息素浓度和启发式信息选择下一次飞行的路径,通过反复迭代这两个阶段无人机可以逐渐优化其飞行路径达到最优或接近最优的监测效率和覆盖范围,因此蚁群算法在无人机飞行路径规划中的应用可以有效地减少能量消耗和飞行时间提高监测效率和覆盖范围,对于提升监测任务的执行效率和成果具有重要意义。
结束语
综上所述,本文提出了一种基于Yolov5s算法和蚁群算法的无人机森林火灾检测系统通过实验验证了该系统在火灾检测和路径规划方面的有效性和可行性,未来的研究方向包括进一步优化算法性能、提高系统稳定性以及实现系统在实际应用中的推广和应用。
参考文献:
[1]魏雅丽,牛为华.改进YOLOv5s的轻量化航拍小目标检测算法[J].计算机技术与发展,2024,34(02):53-59.
[2]孙景云,马小雯.基于广义Hurst指数和蚁群优化算法的配对交易策略研究[J].兰州财经大学学报,2024,40(01):88-100.
[3]翟柯嘉.基于深度学习的无人机采集图像的森林火灾检测研究[D].沈阳航空航天大学,2022.DOI:10.27324/d.cnki.gshkc.2022.000541.
[4]吴福明.基于无人机视频图像的崇礼地区林火检测研究[D].南京林业大学,2022.DOI:10.27242/d.cnki.gnjlu.2022.000546.
作者简介:王橙林(1997.8-),男,汉族,内蒙古呼伦贝尔,研究生在读,学生,研究方向:机器视觉

 京公网安备 11011302003690号
京公网安备 11011302003690号


