



- 收藏
- 加入书签

静电悬浮装置的关键技术及应用
 打开文本图片集
打开文本图片集
摘要:静电悬浮装置是一种基于静电原理实现物体悬浮的技术,具有无接触、低摩擦、高精度等特点,广泛应用于精密加工、高速传动以及实验室研究等领域。本文将深入分析静电悬浮装置的关键技术,并介绍其应用情况,以供参考。
关键词:静电悬浮;装置;技术
静电悬浮装置利用静电力的作用,使物体在无接触支撑的情况下实现悬浮。相比传统的机械悬浮技术,静电悬浮装置具有高精度、无接触、零摩擦等特点,逐渐在工业、科学和交通等领域特别是真空环境下得到广泛应用。
1概述
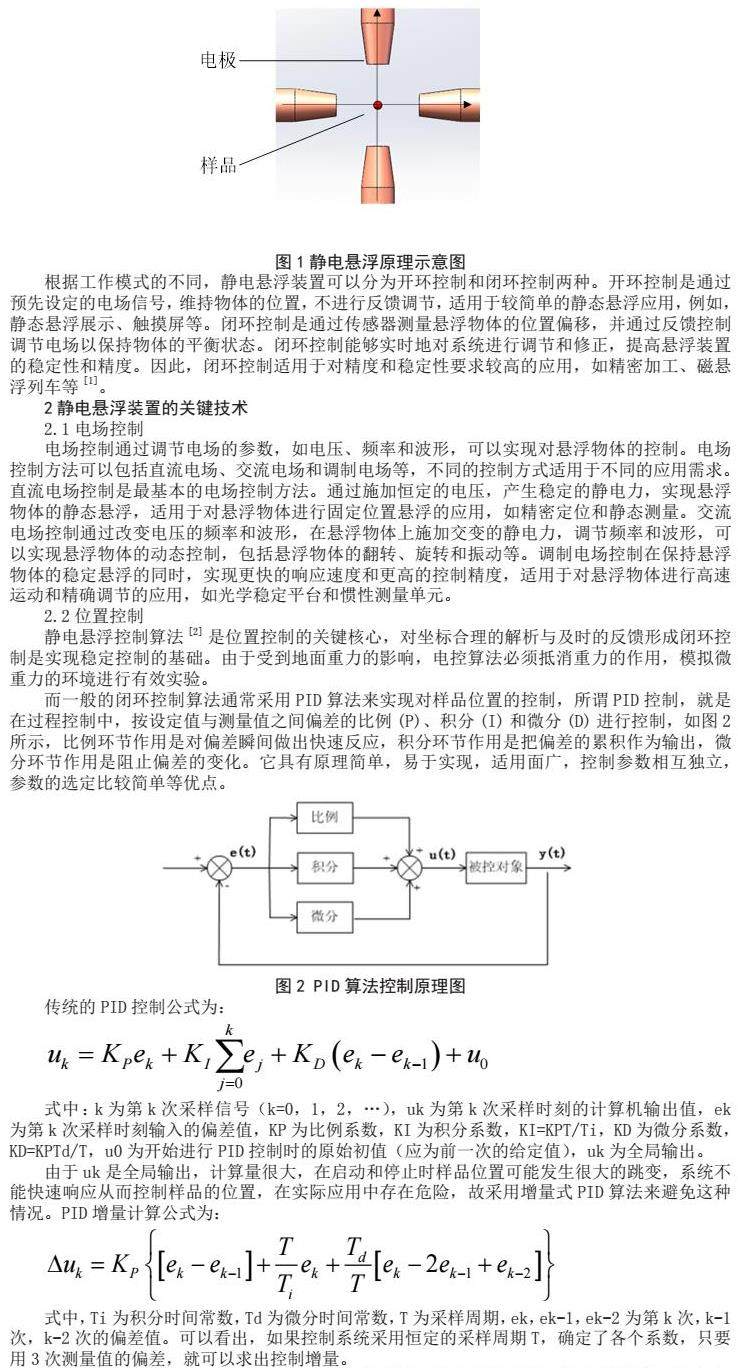
静电悬浮是基于库仑定律的一种技术,即两个带电体之间的静电力与它们之间的距离呈反比关系,与电荷量的平方成正比。当两个带电体之间的静电力相等且反向相等时,物体将保持在平衡状态,实现悬浮(见图1所示)。静电悬浮装置通常由悬浮物体、电极系统和控制系统组成,悬浮物体具有带电特性,可以是金属球、导体平板等。电极系统包括正负电极,用于产生控制悬浮物体的电场。控制系统则负责测量物体的偏移并调节电场以保持平衡。
根据工作模式的不同,静电悬浮装置可以分为开环控制和闭环控制两种。开环控制是通过预先设定的电场信号,维持物体的位置,不进行反馈调节,适用于较简单的静态悬浮应用,例如,静态悬浮展示、触摸屏等。闭环控制是通过传感器测量悬浮物体的位置偏移,并通过反馈控制调节电场以保持物体的平衡状态。闭环控制能够实时地对系统进行调节和修正,提高悬浮装置的稳定性和精度。因此,闭环控制适用于对精度和稳定性要求较高的应用,如精密加工、磁悬浮列车等[1]。
2静电悬浮装置的关键技术
2.1电场控制
电场控制通过调节电场的参数,如电压、频率和波形,可以实现对悬浮物体的控制。电场控制方法可以包括直流电场、交流电场和调制电场等,不同的控制方式适用于不同的应用需求。直流电场控制是最基本的电场控制方法。通过施加恒定的电压,产生稳定的静电力,实现悬浮物体的静态悬浮,适用于对悬浮物体进行固定位置悬浮的应用,如精密定位和静态测量。交流电场控制通过改变电压的频率和波形,在悬浮物体上施加交变的静电力,调节频率和波形,可以实现悬浮物体的动态控制,包括悬浮物体的翻转、旋转和振动等。调制电场控制在保持悬浮物体的稳定悬浮的同时,实现更快的响应速度和更高的控制精度,适用于对悬浮物体进行高速运动和精确调节的应用,如光学稳定平台和惯性测量单元。
2.2位置控制
静电悬浮控制算法[2]是位置控制的关键核心,对坐标合理的解析与及时的反馈形成闭环控制是实现稳定控制的基础。由于受到地面重力的影响,电控算法必须抵消重力的作用,模拟微重力的环境进行有效实验。
而一般的闭环控制算法通常采用PID算法来实现对样品位置的控制,所谓PID控制,就是在过程控制中,按设定值与测量值之间偏差的比例(P)、积分(I)和微分(D)进行控制,如图2所示,比例环节作用是对偏差瞬间做出快速反应,积分环节作用是把偏差的累积作为输出,微分环节作用是阻止偏差的变化。它具有原理简单,易于实现,适用面广,控制参数相互独立,参数的选定比较简单等优点。
传统的PID控制公式为:
式中:k为第k次采样信号(k=0,1,2,…),uk为第k次采样时刻的计算机输出值,ek为第k次采样时刻输入的偏差值,KP为比例系数,KI为积分系数,KI=KPT/Ti,KD为微分系数,KD=KPTd/T,u0为开始进行PID控制时的原始初值(应为前一次的给定值),uk为全局输出。
由于uk是全局输出,计算量很大,在启动和停止时样品位置可能发生很大的跳变,系统不能快速响应从而控制样品的位置,在实际应用中存在危险,故采用增量式PID算法来避免这种情况。PID增量计算公式为:
式中,Ti为积分时间常数,Td为微分时间常数,T为采样周期,ek,ek-1,ek-2为第k次,k-1次,k-2次的偏差值。可以看出,如果控制系统采用恒定的采样周期T,确定了各个系数,只要用3次测量值的偏差,就可以求出控制增量。
通过对PID控制理论的认识可知,在PID控制中,增大比例系数可提高系统的调节速度,积分控制减小系统的稳态误差,微分控制能对偏差变化进行提前预报,从而改善系统的动态性能。例如,在偏差较大时,为提高响应速度,避免系统出现大的超调量,KP取大值,KI取0;在偏差较小时,为防止系统振荡,稳定性变差,KP取小值,KI取大值。
但同时也需要注意在PID控制中引入积分环节的目的是为了消除静差,提高控制精度,但在悬浮起步过程或大幅度改变控制参数时,系统输出有很大的偏差,这样将造成PID运算的积分累积,致使控制量超过执行机构可能允许的最大动作范围对应的极限控制量,引起系统的较大的超调,甚至引起系统较大的振荡。
2.3稳定性改善
静电悬浮装置在实际应用中面临着一系列稳定性挑战,如外界干扰、温度变化和振动等因素。为了提高稳定性,可以采取相应的措施,如优化电极设计、应用自适应控制算法和增加补偿机制等,稳定性改善技术能够提高悬浮装置的性能和可靠性。(1)优化电极设计。电极的形状、大小和排列方式都会对电场分布和悬浮效果产生影响。通过优化电极设计,可以实现均匀的电场分布和稳定的悬浮力。合理选择电极形状、大小和排列方式,并通过电场模拟和优化来设计和调整电极,能够提高系统的稳定性。(2)自适应控制算法。自适应控制算法能够实时地根据系统状态和环境变化,自动调整控制策略和参数,以适应不同的工作条件。通过应用自适应控制算法,可以提高系统的鲁棒性和稳定性。(3)增加补偿机制。增加补偿机制可以弥补外界干扰和系统变化对系统稳定性的影响。例如,在电极设计中添加补偿电极或使用补偿电路,可以通过调整电荷分布来抵消外界干扰的影响。补偿机制还可以包括基于神经网络或模糊控制的补偿控制策略,以实时校正悬浮系统中的误差和不确定性。2.4考虑环境因素
静电悬浮装置的稳定性还会受到温度变化、振动和湿度等环境因素的影响。为了提高稳定性,需要在电极设计和控制系统中考虑环境因素的影响,并采取相应措施进行补偿和调节[3]。
3静电悬浮装置技术的应用
3.1精密加工
静电悬浮技术可以用于精密加工领域,如半导体制造、光学加工和微纳加工等。通过悬浮物体的精确控制,可以实现高精度加工,避免因机械接触而引起的损伤或振动。静电悬浮装置在这些领域中的应用能够提高产品质量和生产效率。在半导体制造过程中,静电悬浮技术可以应用于晶圆搬运、定位和对齐等环节。悬浮物体的精确控制,能够避免机械接触对晶圆造成的损伤,确保高精度的定位和对齐。这有助于提高半导体芯片的生产质量和制造效率。在光学加工领域中,悬浮物体的稳定控制,实现高精度的表面平整度和光学性能。这对于制造高精度光学器件具有重要意义,如望远镜、激光器和光学传感器等。在微纳加工领域,微纳加工通常涉及到对微米尺度结构的加工和操作,这对精确控制至关重要。静电悬浮装置的精准控制,可以实现对微纳加工对象的定位、操纵和加工,在生物医学、纳米材料与器件等领域都具有重要应用,如微流控芯片、纳米传感器与晶体管等。
3.2运输与搬运
静电悬浮技术可以用于运输和搬运工业中的物体。例如,在物流和仓储领域,静电悬浮装置可以用于悬浮和移动货物,实现无接触的搬运。这种应用方式可以提高物流效率、降低能耗,并减少搬运过程中的损坏风险。静电悬浮装置可以通过对货物施加适当的电场,实现对货物的悬浮。这种悬浮方式可以减少物体与地面之间的摩擦和接触,降低能耗、延长设备寿命。同时,货物悬浮还可以减少振动和震动,减少货物运输过程中的损坏风险。对于大型货物、易损物品或高精度设备的搬运,静电悬浮技术能够提供更加稳定和可靠的悬浮效果。利用静电悬浮技术,还可以实现对货物的无接触搬运。通过对货物施加电场,使货物悬浮并通过操纵电场来控制货物的位置和移动。这种无接触搬运方式具有许多优点,如避免了摩擦和物体之间的接触,减少了搬运过程中的磨损和损坏风险,实现多物体同时运输和高速运输,提高物流效率和生产力。静电悬浮技术可以与自动化系统结合,实现自动化的物体搬运。通过结合传感器和控制算法,可以实现对货物位置和姿态的感知和控制。这样的自动化搬运系统可以在物流和仓储领域中自动执行搬运任务,提高工作效率,减少人工操作和人力成本[4]。
3.3仪器仪表
静电悬浮技术在仪器仪表领域有着重要的应用。例如,在高精度测量和实验设备中,通过使用静电悬浮装置,可以消除机械摩擦和振动对测量的干扰,提高测量的准确性和稳定性。这种应用方式对于科学研究和工业检测领域非常有价值。在需要进行高精度测量的仪器中,静电悬浮技术可以用来消除机械接触带来的摩擦和振动。通过将测量对象悬浮在电场中,可以实现无接触的测量,并减少外界干扰对测量结果的影响。这样可以提高测量的准确性和稳定性,适用于需要精确测量的领域,如光学测量、精密长度测量、质量测量等。在科学实验和工业试验中,静电悬浮技术可以用来保持实验台、试验设备或实验样品的稳定悬浮状态。这对于需要在微重力环境下进行实验或需要减少外界干扰的试验非常重要。通过静电悬浮装置的精确控制,可以实现对实验物体的高精度定位和平衡,确保实验的可靠进行。在惯性导航仪器中,静电悬浮技术可以用来消除运动中的振动和机械摩擦对传感器的影响。通过将传感器悬浮在电场中,可以减少外界干扰,提高惯性导航仪器的精度和稳定性。静电悬浮技术在惯性导航仪器中的应用对于航空航天、汽车导航和船舶导航等领域具有重要意义。
3.4科学研究
静电悬浮技术在科学研究中也有着广泛的应用。例如,在凝聚态物理研究中,静电悬浮装置可以用于悬浮和控制微米级或纳米级的粒子,实现对粒子之间的相互作用和结构的研究。此外,静电悬浮技术还可以应用于空间科学、物理模拟和材料科学等领域。在凝聚态物理领域,静电悬浮技术可以用于悬浮和控制微米级或纳米级的粒子。通过悬浮粒子的精确控制,可以研究粒子之间相互作用、结构和动力学行为,以及凝聚态物质的性质和行为。这在研究纳米材料、胶体颗粒、自组装结构和液态晶体等方面具有重要作用。在太空站和航天器中,静电悬浮装置可以用于悬浮和控制微重力环境下的实验样品或设备。通过消除机械接触和振动带来的干扰,可以在微重力条件下进行精密的实验和观测,研究微重力环境对物质和生物的影响。在物理模拟实验中,通过对悬浮物体的精确控制,可以在实验室中模拟复杂的物理环境,如地震、风暴或海浪等,帮助科学家更好地理解自然界中的现象和过程,并推动相关领域的研究和技术发展。在材料科学研究中,静电悬浮技术可以用于控制材料的生长和形态。通过在悬浮状态下控制材料的成核和生长过程,可以实现对材料微结构和性质的调控,对于研究材料生长机制、相变和晶体缺陷等方面具有重要意义[5]。
4结语
综上所述,静电悬浮装置在精密加工、运输与搬运、仪器仪表和科学研究等领域具有广泛的应用前景。随着这些技术的不断发展和创新,静电悬浮装置将在更多领域发挥重要作用,推动科技进步和应用创新。
参考文献:
[1]贺晓霞,李娇娇,李海霞,韩丰田,刘云峰.一种地面用静电悬浮加速度计的误差分析及仿真[J].中国惯性技术学报,2020,28(6):794-801.
[2]鱼航,李云鹏,王鹢,陶文泽.基于斩波技术的静电悬浮加速度计驱动电路噪声抑制方法研究[J].空间电子技术,2020,17(3):65-72.
[3]刘爽,刘云峰,董景新.闭环点位置对静电悬浮加速度计性能影响研究[J].仪器仪表学报,2015,36(7):1618-1625.
[4]王飞龙,孙一宁,孙志斌,等.基于PSD的静电悬浮液滴振荡技术在表面张力与黏度测量中的应用[J].仪表技术与传感器,2016(12):173-175.
[5]陈东阳,郭清远,董文博,贺欢,余建定,张东伟,梁学锋.基于高速视觉的静电悬浮控制系统[J].光学精密工程,2019,27(11):2343-2353.

 京公网安备 11011302003690号
京公网安备 11011302003690号


