



- 收藏
- 加入书签

基于MEMS技术的倾角加速度组合传感系统研究及应用
 打开文本图片集
打开文本图片集

摘要:本文介绍了运用集成电路技术以及传感器组合感知技术,将各个“微机电系统”通过结构设计、系统化控制、信号采集处理、双向通信、超低电压供电等方法为一体的完整的倾角加速度组合微机电系统(MEMS)。MEMS通过长时间的技术发展和技术的更新迭代,将从高精度化,以满足技术革命的智能化应用需求;从微型化,以节省空间为目的的便捷的应用需求;从高集成化,以多元化感知集成,适应多维度精密化不同复杂环境下的市场拓展与应用。MEMS倾角加速度组合系统以其特有的技术特性使其在许多民用和军事领域具有广阔的应用前景。
关键词:倾角;加速度;传感器;MEMS;地质灾害
0引言
MEMS(Micro-Electro-Mechanical System),简称“微机电系统”[1]。1991年,Cole开始开发电容式微加速度计,1998年,美国CSDL公司设计并研制出最早的MEMS陀螺仪,同年,Drapor实验室开发了另一种形式的MEMS陀螺仪,MEMS陀螺仪是利用振动质量在基座(壳体)驱动下的科里奥利效应来感知角速度的[2]。
在MEMS这项发达的技术发展史上,MEMS加速度计和MEMS角速度传感器以其独特的单轴、双轴和三轴不同的敏感机制特性成为MEMS技术发展的传感器之一,同时也是设计和加工技术最为成熟的传感器之一。
在消费类电子领域,MEMS组合传感器主要应用于智能手机中的加速计和陀螺仪,到智能手表、TWS耳机和VR/AR设备中的传感器,MEMS传感器不断推动这一领域的创新;在汽车工业领域,随着车内自动驾驶功能的增加,MEMS渗透率在自动驾驶和ADAS功能集成的推动下不断增长。MEMS技术满足了汽车行业对精准感知和控制的需求;工业领域,MEMS传感器被广泛用于工业自动化和工业4.0实施中,帮助机器人和AGV等设备实现精准感知和控制;在医疗领域,MEMS技术的小型化和可穿戴设备的引入增加了MEMS组件在诊断和监测设备中的需求;人工智能、物联网和智慧城市等新兴技术领域的兴起也拓展了MEMS传感器的应用范围。结合MEMS的加速度测量,倾斜测量,振动测量甚至旋转测量功能,将进一步推动MEMS市场的增长。在目前国家防灾减灾的政策引导下,针对地质灾害监测中地理环境的影响、全天候实时运行监测、市电难以到达的特殊要求,将MEMS倾角加速度惯性组合传感器应用到地质灾害监测中,是将MEMS技术一种新领用的推展,也是对地质灾害监测应用的技术改革,进一步加强了地质灾害监测的时效性。是对保护人民生命财产安全的一种保障。
1 MEMS技术基本原理
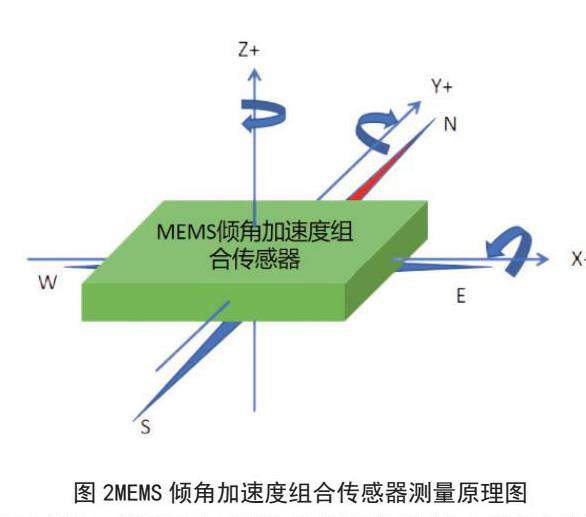
通过测量角速率的陀螺仪和测量线加速度的加速度计相结合,形成一款MEMS倾角加速度组合传感系统。MEMS 陀螺仪具有体积小、重量轻、环境适应性强、价格低、高集成、易于大批量生产等特点。
MEMS陀螺仪又称MEMS角速度传感器,是一种测量角速度传感器。测量角速度,必须在运动的物体中,寻找到一个静止不动的锚定物——陀螺。高速旋转中的陀螺,角动量很大,旋转轴不随外界运动状态改变而改变,会一直稳定指向一个方向。
陀螺仪最大的用处就是用来保持稳定。而用陀螺仪,也可以保持机器的稳定性。陀螺仪的结构,核心就是转子,作为其他运动物体的静止锚定物。高速旋转的陀螺在一条线上保持平衡,这就是陀螺仪的基本原理。
MEMS陀螺仪传感器的外框在旋转运动期间沿相反方向摆动,当物体旋转时,内部梳状结构一部分产生偏转,改变梳状结构间的距离,从而改变电容,测量出转角。
MEMS 加速度计是一种能够测量物体线加速度和角加速度的器件。电容式MEMS加速度计是目前应用最多的类型。电容式 MEMS 加速度计具有监测精度高、受温度影响小、功耗低、宽动态范围、以及可以测量静态加速度等优点。
MEMS电容式加速度传感器既能感应到“动态”加速度,又能感应到“静态”加速度,也就是我们说的重力加速度,而进行定向时,测得的加速度包括了各个轴上的重力加速度分量和动态运动引起的加速度分量。
MEMS组合传感器不是一种新的MEMS传感器类型,而是指加速度传感器、陀螺仪、磁传感器等的组合,利用各种惯性传感器的特性,可以实现全方位、立体运动的监测。
组合惯性传感器的一个被广为熟悉的应用领域就是惯性导航,比如飞机/导弹飞行控制、姿态控制、偏航阻尼等控制应用、以及中程导弹制导、惯性GPS导航等制导应用[4]。本文将MEMS倾角加速度组合系统应用于地质灾害监测中。
2 MEMS技术组合应用设计
2.1MEMS组合传感器硬件设计
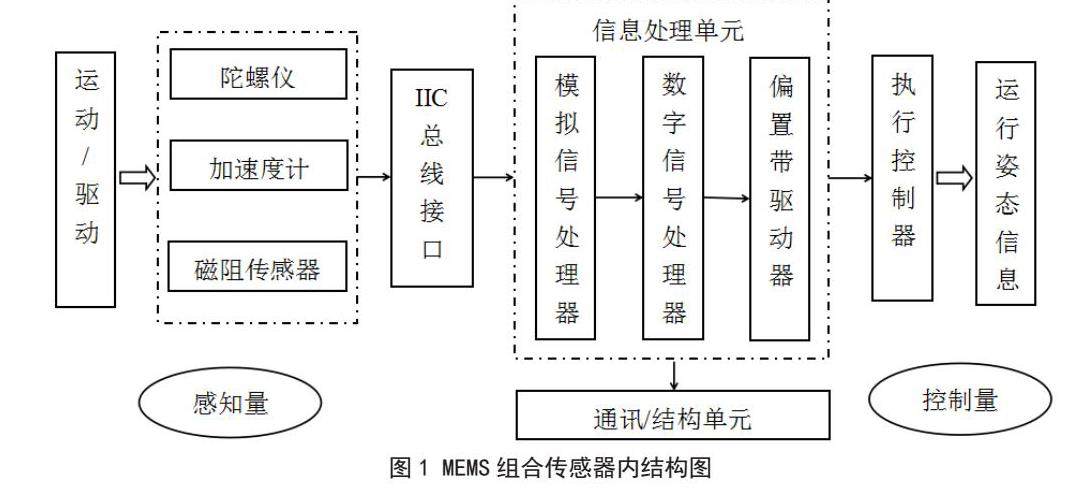
MEMS组合传感器是由三轴加速度、三轴陀螺仪、磁传感器组合而成,实现全方位、立体运动的监测模式。选择3轴陀螺仪和3轴加速度传感器形成三维测量传感器,同时选取高分辨率磁阻传感器获取磁北方向数据,通过三种微型传感器结合外围电路,实现数据的同时间点的统一链路获取实时采集。在电路设计和各芯片数据获取时统一采用IIC接口方式。组合传感器在收到外力的运动或驱动时,三个微型传感器感知到数据的变化,均通过IIC总线接口同时获取到各芯片的原始数据,经过信息处理单元将数据通过模拟信号处理器、数字信号处理器和偏置带驱动器,再经过执行控制器将数据进行融合计算输出运行姿态信息。MEMS组合传感器内结构如下图2-1:
2.2主要芯片参数
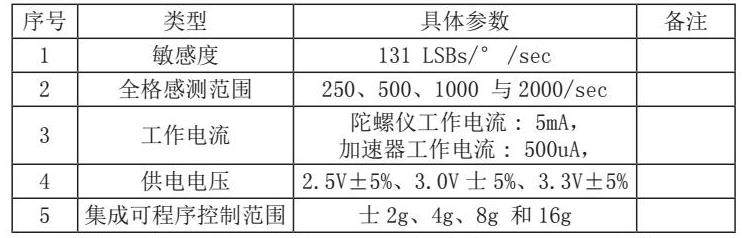
倾角加速度传感器选择MPU6050芯片,组合了3轴陀螺仪和3轴加速度传感器,PU6050芯片预留有2个IIC接口,在电路设计上可通过1个IIC接口进行3轴陀螺仪和3轴加速度数据的采集,另外1个IIC接口可连接磁阻传感器,并利用MPU6050芯片中集成的数字运动处理器进行加速引擎完成数据的采集。搭建DMP(数据管理平台)把各传感芯片采集的各分散的多方数据,进行整合纳入到统一的技术平台,并对这些数据进行解析、归类、细分。
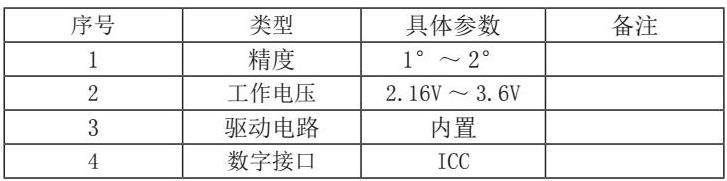
磁传感器选择表面贴装的带有数字接口的弱磁传感器芯片HMC5883,三轴磁阻传感器和 ASIC进行一体化封装, 体积小、高集成、接口简单,只需一个微处理器和两个外部 ST 电容。易于装配并与高速 SMT 装配件兼容,适用于超级功耗场景下的应用场合。可获取到罗盘航向、硬磁、软磁以及自动校准。
核心控制单元采用MSP430F5438A芯片,该芯片具有极低的功耗、强大的处理能力和丰富的外设接口,适用于各种需要高集成度和高可靠性的应用场景。
MSP430F5438A芯片采用16位RISC架构,具有高效的指令集和高速的执行速度。同时,它还配备了大量的寄存器和SRAM,可以满足各种复杂的控制和数据处理需求。
此外,MSP430F5438A还具有丰富的外设接口,包括UART、SPI、I2C、ADC等,可以方便地与各种传感器和执行器进行通信和控制。同时,它还支持多种时钟源和时钟频率,可以根据实际需要进行灵活的配置。
2.3MEMS组合传感器软件设计
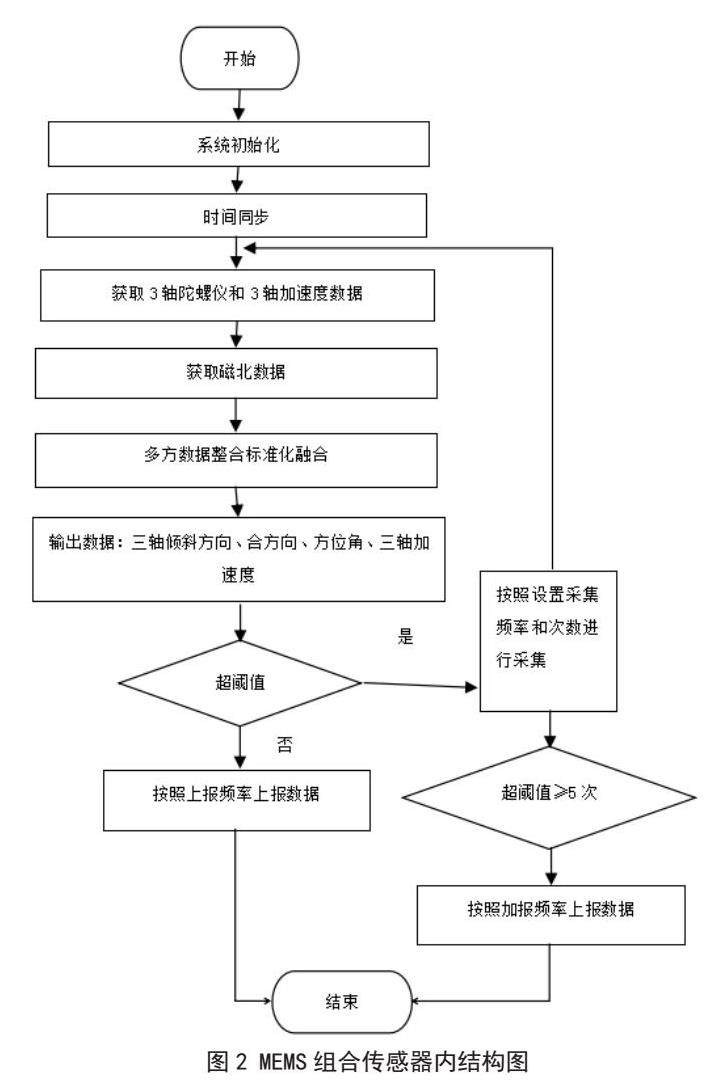
主程序包括系统初始化、时间同步、获取3轴陀螺仪和3轴加速度数据、获取磁北数据、多方数据真个好标准化容、数据输出、超阈值判断、可设置采集频率、可设置上报频率等部分[8]。其结构如图2所示。
2.3获取传感器原始数据
第一步:系统初始化
MSP430F5438A主芯片通过IIC总线接口[3]与MPU6050和HMC5883连接。IIC协议定义了简化的通信接口协议,符合IIC总线规格的规定。总线的位格式包括一个8位的数据/地址传送位和一个1位应答位。为了实现对数据采集芯片的控制和数据采集,我们首先对这两个芯片进行初始化,以确保所采集的数据为原始采集数据。
此外,为了实现准确的数据采集,我们还考虑如何正确地配置MPU6050和HMC5883的寄存器。可以通过使用IIC接口发送相应的控制指令来完成。在初始化之后,我们可以使用IIC接口发送指令来启动数据采集过程。这些指令将根据传感器的类型和需要采集的数据类型进行定义。
第二步:复位MPU6050+HMC5883
通过主芯片的复位功能,我们可以将MPU6050和HMC5883内部的寄存器恢复到默认值。这个过程涉及对芯片进行复位,这将清除所有内部的设置和数据,并将它们重置为默认状态。在复位之后,MPU6050和HMC5883将会被唤醒,并进入工作状态。复位操作是一种常用的方法,用于将嵌入式系统的硬件组件恢复到初始状态,以便重新开始新一轮的工作。在进行复位操作之后,我们需要重新配置MPU6050和HMC5883的寄存器以适应特定的应用需求。同时,也需要确保主芯片与这两个传感器之间建立正确的通信连接,以便能够正确地读取和解析它们的数据。
第三步:设置满量程范围
首先需要考虑这两个传感器在应用中的需求和限制。对于陀螺仪,满量程范围被设置为±90°,这意味着它可以测量从-90°到90°的角速度变化。这个范围适用于大多数常见的应用,如运动监测、方向监测等。
加速度传感器方面,满量程范围被设置为±2g。这是指传感器可以测量从-2g到2g的加速度变化。在许多应用中,例如地质灾害监测、手机、游戏手柄等,这个范围已经足够满足大部分的使用需求。
通过这样的设置,我们可以确保传感器在正常工作条件下不会超出其测量范围。同时,这也为我们在处理传感器数据时提供了正确的参考值。在进一步的处理和分析中,我们可以根据这些设定值对原始数据进行归一化或者按照一定的比例进行转换,从而得到更为准确和有用的信息。
此外,对于这两个传感器的设置,我们还需要考虑它们的分辨率、灵敏度、线性度等其他参数。这些参数将直接影响到传感器输出的准确性和稳定性。因此,在设置满量程范围的同时,我们也需要根据具体的传感器特性和应用需求来选择合适的参数设置。
第四步:配置系统时钟源
在整个系统运行中,时钟源是确保程序正常运行的至关重要的因素。为了获得更高的时钟精度,我们通过外围电路的时钟芯片设置和控制运行时差,并对MPU6050+HMC5883两个主要数据采集芯片中的电源管理寄存器进行设置。特别地,我们将寄存器的最低三位用于设置系统时钟源,从而提供更为精确的时钟信号。
为了实现可靠的通信,MPU6050+HMC5883芯片中的SCL和SDA线路需要上拉电阻(Rp)连接在主机(通常是微处理器)和MPU6050+HMC5883之间。这种连接方式有效地保证了数据的稳定传输。
IIC总线协议允许多个设备相互连接,且单个主机可以与多个主机进行配置。这种灵活性使得系统设计更为复杂,但同时也提供了更高的数据传输效率。主程序发起数据采集信号,上传数据格式以8位为单位,所采集传感器均分配唯一地址码,使得数据传输过程中不会发生混淆。
第五步:设置其他参数
在主程序中,除了主要的控制和数据处理部分,还需要设置许多辅助参数以确保程序的正常运行。这些参数包括但不限于采集周期、采集频率、上报周期、上报通道数、加报阈值以及加报上报频率等。
采集周期是指程序在每个周期内进行数据采集的时间长度。这个参数需要根据实际应用的需求进行设置,比如在实时监测系统中,可能需要将采集周期设置为秒级别,而在一些需要高频率数据采集的场景中,则可能需要将采集周期设置为毫秒级别。
采集频率则是衡量系统在每个采集周期内进行数据采集的频率。这个参数也需要根据实际需求进行设置,比如在一些需要实时反应的系统中,可能需要将采集频率设置为较高的数值,而在一些不需要实时反应的系统中,则可能只需要将采集频率设置为较低的数值。
上报周期是指程序在每个周期内将数据上报给上级系统的间隔时间。这个参数需要根据上级系统的需求以及网络传输的实际情况进行设置。
上报通道数是指程序能够同时上报数据的通道数量。这个参数需要根据实际应用的需求进行设置,比如在一些需要同时上报多个数据源的系统中,可能需要将上报通道数设置为较高的数值。
加报阈值是指当数据达到或者超过这个阈值时,程序会触发加报操作。这个参数需要根据实际应用的需求进行设置,比如在一些需要实时监控系统状态的情况下,可能需要将加报阈值设置为较低的数值。
加报上报频率是指当触发加报操作后,程序在每个周期内上报加报数据的频率。这个参数需要根据实际应用的需求进行设置,比如在一些需要实时监控系统状态的情况下,可能需要将加报上报频率设置为较高的数值。
通过合理地设置这些辅助参数,可以保证主程序在各种情况下都能够正常运行,并及时准确地完成数据采集和上报的任务。
第六步MPU6050+HMC5883通讯及自测试
MPU6050+HMC5883通过IIC总线与主芯片进行连接,IIC总线规格规定,SDA线上的传输必须在SCL线处于低电平时才可发生。
所有总线传输从主程序发出启动序列开始,接着发出采集地址位和有效位。在指定的操作过程中,主程序完成读出或写入,并在读出时完成时钟校对。总线传输以标识符控制主程序的停止与终止指令。
为了验证MPU6050+HMC5883是否能正常工作,设立了自检模块,用于监测由传感器偏移产生的标称磁场强度。通过配置寄存器A和配置寄存器B,我们可以进入单一测量模式进行两次测量。首先,我们获取置位脉冲后的外部磁场测量数据,然后将、Y、Z三轴设置为正偏置模式。将两次数值相减,就可以得到纯净的地磁测量值,并存储在数据输出寄存器中。通过此方式进行多次采集校准保证采集芯片的采集正常和数据准确性。
2.4传感器数据校准
MEMS倾角加速度组合传感器中的倾角加速度传感器可测量三轴方向任意方向的变化量,和加上磁阻传感器测量磁场在绕Z轴旋转过程所产生的磁北角。
倾角加速度传感器能够感知和测量物体在三个轴向(即X轴、Y轴和Z轴)的倾斜角度变化,可以用于精确测量和反馈物体的姿态、位置和运动状态。
同时,磁阻传感器在MEMS倾角加速度组合传感器中起到了重要的作用。磁阻传感器能够测量磁场的方向和强度,特别适合用于测量磁场在绕Z轴旋转过程中所产生的磁北角。这种测量对于导航和姿态控制等应用来说非常重要,因为它可以帮助系统确定其相对于地球磁场的方位和倾斜角度。
总的来说,MEMS倾角加速度组合传感器通过倾角加速度传感器和磁阻传感器的协同工作,能够实现对物体姿态、位置和运动的精确测量,为各种导航和控制应用提供了重要的信息输入。
在数据采集时会存在受周围磁性材料干扰,而加速度计无法直接提供姿态角中的航向角的信息[5,6]。
MEMS倾角加速度组合传感器在实际应用过程中的数据偏差分为条件类误差和环境类误差。条件类误差的输入和输出组合所对应的数据关系,可以通过数据条件设定和数据建模加以修正,这类误差主要包含归零误差、线性误差、安装误差等,环境类误差是由MEMS器件不确定因素带来的随机变化,比如角度随机偏移、零偏不稳定等,这种误差主要使用自回归平均模型进行建模和校正。
条件类误差可以分为稳定部分和随机噪声。其中稳定部位是可以通过校准来消除的,随机部分被称为条件类误差的漂移(drift)只能通过建立随机误差数据建模来拟合分析。
安装误差包括非正交性和非对准性,其都是由传感器制造工艺和安装偏差导致的,非正交性指的是加速度计或陀螺仪的三个测量轴不正交得性质,非对准行是传感器坐标系和传感器载体坐标系之间的角度差。
3 MEMS在地质灾害中应用
3.1MEMS组合全量程测量功能
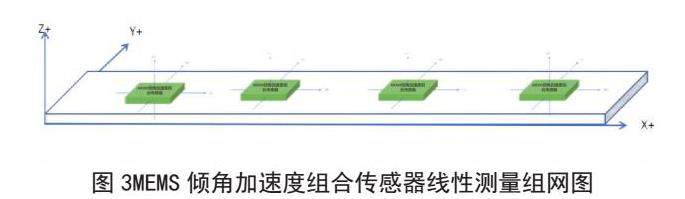
MEMS组合传感器在地质灾害监测测量过程中,可通过基于MEMS技术的倾角加速度组合传感器进行非均匀条件下采用,通过采样方式和组网方式重构组成线状监测网络或网状监测网络地质灾害监测地表形态。在地质灾害监测技术实施过程中主要分为:采集控制、数据同步采集[7]、数据融合处理、多方式数据传输、地表形态重构,再通过对MEMS组合传感器获取的传感器8组数据,将采样频率、采样点位、采样数量、采样数值,通过数据的融合处理形成地表形态模型图。
实现设备的布网监测,其中重点需要注意的是组合传感器布设之间的距离。若传感器间的距离较大,采样频率较大,则可能无法满足地表形态模型的建立,失去了构建网络监测的意义;若传感器间的距离过近,采样频率较密,则可能造成监测组合传感器浪费,或数据无法真实体现到网格化监测面中,随着组合传感器数量的增加,所需要配套辅材将会增多,使系统复杂性增加。
将单个组合传感器原始数据重构地表形态模型。组合传感器获得空间三维倾斜数据、三轴变加速度变形数据、磁北方位角数据。建立角度值与三维坐标的关系 ,即地质灾害地表三维重构模型。在采集到不同时间段传感器8组数据的基础上,通过不同时间段、不同监测点的偏移量、方位角度和沉降量,实现数据的全量程三维数据监测。具体监测数据获取如下:
//得到温度值
//返回值:温度值(扩大了 100 倍)
short MPU Get Temperature(void)
u8 buf[2];
short raw, float temp,MPU Read Len(MPU ADDRMPU TEMP OUTH REG2,buf).raw=((ul6)buf[o]<<8)bufll;temp=36.53+((double)raw)/340.return temp*100:.
//得到陀螺仪值(原始值)
//gx,gy,gz:陀螺仪 x;y,z 轴的原始读数(带符号)//返回值:0.成功
//其他,错误代码
u8 MPU Get Gyroscope(short *gx,short *gy,short *gz)
u8 buf 6]res;
res=MPU Read Len(MPU ADDRMPU GYRO XOUTH REG6,buf).if(res==0)
*gx=((ul6)buf[0]<<8))bufll];gy=((u16)buf2]<<8)buf3]
gz=((ul6)buf[4]<<8)buf[5]
return res,
//得到加速度值(原始值)//gx,gy,gz:陀螺仪 xy,z 轴的原始读数(带符号)//返回值:0.成功
3.2MEMS组合传感器值守功能
MEMS作为物理连接的半导体产物,将受益于物联网产业的发展,将MEMS技术应用与消费电子、汽车电子、工业控制、军工等行业已经是时代发展的必要了,而基于MEMS技术将倾角加速度磁北角等数据的有效融合,使MEMS技术有了新的应用场景,便是地质灾害监测。在地质灾害监测过程中面临最难解决但又必须要解决的问题就是功耗和实时值守。地质灾害关乎所在地区百姓的生命和财产安全,而监测设备的实时值守就是在地质灾害监测过程中最为有效的一点。MEMS组合传感器将在地质灾害监测过程中起到很重要的作用,MEMS组合传感器可单独应用,监测地表的三维倾斜加速度数据;也可同裂缝计组合使用,监测地表相对位移、倾角加速度值,通过MEMS的值守功能通过加报的方式将数据进行上报;也可同GNSS组合使用,监测地表绝对位移的同时可通过MEMS触发功能提高GNSS的解算速度和数据输出频率。此类监测方式完全可将MEMS组合传感器的值守功能应用到各种监测设备中,使各类监测设备增大上报时间间隔,提升监测设备的待机时长,同时可通过MEMS的组合传感器达到监测值守的功能,更大程度的降低了地质灾害监测设备的应用成本和运维成本。
4 结语
MEMS倾角加速度组合传感器是一种高精度的传感器,能够实现监测设备的小型化、低成本化的实时值守功能。这种传感器具有广泛的应用前景,可以应用于多个行业,如地质灾害监测、无人系统、定位导航、平台稳定控制等。
在地质灾害监测方面,MEMS倾角加速度组合传感器可以用于监测地质体的运动趋势监测和变形监测,及时发现地质灾害的迹象,为预防和减轻地质灾害提供科学依据。
在无人系统方面,MEMS倾角加速度组合传感器可以用于无人车辆、无人机等无人系统的姿态控制和导航,提高无人系统的稳定性和精度。
在定位导航方面,MEMS倾角加速度组合传感器可以用于高精度定位和导航,特别是在复杂环境中,如城市峡谷、森林等,可以提高定位和导航的精度和可靠性。
在平台稳定控制方面,MEMS倾角加速度组合传感器可以用于监测平台的运动和振动,为平台的稳定控制提供依据,提高平台的稳定性和精度。
随着人们对自然灾害的监测需求不断增加,MEMS倾角加速度组合传感器在自然灾害监测方面的应用也将越来越广泛。同时,随着智慧城市建设的不断推进,这种传感器在智慧城市监测方面的应用也将得到进一步拓展。
总之,MEMS倾角加速度组合传感器的应用前景非常广泛,未来将在更多的行业中得到应用和发展
参考文献:
[1]赵天贺,汪伟基于 MEMS 技术的捷联惯导系统现状[.飞航导弹2017(10): 17-21.
[2]Bao M. Chapter 1 - Introduction to MEMS Devices [J]. Analy-sis & Design Principles of Mems Devices,2005: 1 -32.
[3]Chen D, Yin L, Fu O, et al. A digital readout interface for a surface micromachinedMEMS accelerometer with a novel loop compensatorJ]. Modern Physics Letters B.2020:2050302.
[4]Ghodssi R, Lin P. MEMS Materials and Processes HandbookJ]. chemie ingenieurtechnik,2011,78(10):1480-1482..
[5]Mercker T H, Akella M R. Rigid-Body Attitude Tracking with Vector Measurements andUnknown Gyro Bias[J]. Journal of Guidance Control & Dynamics, 2015, 34(5): 1474-1484.
[6]吴哲明,孙振国,张文增,等.基于惯性测量单元旋转的陀螺漂移估计和补偿方法[J].清华大学学报(自然科学版),2014,54(9):1143-1147.
[7]董伟龙.测站式地质裂缝监测仪设计研究[J].自动化应用,2022(6):37-39

 京公网安备 11011302003690号
京公网安备 11011302003690号


