



- 收藏
- 加入书签

北汽极狐纯电动汽车(EV)常见故障诊断与维修
摘要:北汽极狐纯电动汽车作为新能源汽车领域的代表性车型,其核心由动力电池、驱动电机、充电系统、电子控制系统及辅助系统构成,各系统的协同运行是车辆正常行驶的基础。本文分析了北汽极狐纯电动汽车按系统分类的故障特征,研究了动力电池、驱动电机、充电系统及电子控制系统的故障诊断方法,提出了对应的维修方案与实施路径,并结合动力电池绝缘故障案例开展诊断过程与维修效果分析,旨在构建系统化故障诊断与维修技术体系。
引言:在新能源汽车产业快速发展的背景下,纯电动汽车凭借节能环保、运行高效的优势成为市场主流[1]。北汽极狐系列纯电动汽车凭借优秀的三电系统设计、智能化配置获得了市场认可,保有量持续提升。当前故障研究多集中于通用层面,针对特定车型三电系统的诊断与维修体系缺乏系统性与针对性,传统维修方法难以适配新型电动化结构与控制模式[2]。基于此,本文提出了面向北汽极狐纯电动汽车的分系统故障诊断与维修一体化思路,该思路通过构建动力电池、驱动电机、充电系统及电子控制系统的诊断路径与标准化维修方案,解决了诊断依据分散与维修方法不统一的问题,提升故障识别准确性与维修效率,具有明确的工程应用价值。
1 北汽极狐纯电动汽车(EV)按系统分类的故障分析
1.1 动力电池系统故障
动力电池系统作为北汽极狐纯电动汽车能量核心,由电池包、电池管理系统 BMS 及热管理单元构成,电池包采用三元锂电芯实现能量存储,BMS 负责电压、电流、温度等状态监测与控制,热管理单元维持运行温度稳定,三者协同影响续航表现与运行状态。系统运行过程中易出现绝缘下降、电压不一致、温度异常及容量衰减等故障[3]。绝缘下降多与电池舱进水、高压线束损伤或电芯壳体缺陷相关,绝缘电阻低于阈值时触发高压保护并限制动力输出。电压不一致源于电芯性能差异,压差超过0.2V 后影响能量释放并诱发过充过放。温度异常表现为散热失效或低温环境导致反应受限。容量衰减受循环老化及充放电工况影响,当实际容量低于额定水平约 80%时续航明显下降。
1.2 驱动电机系统故障
北汽极狐纯电动汽车驱动电机系统由驱动电机、电机控制器MCU 及减速机构构成,采用永磁同步电机实现动力输出,MCU 负责转速与转矩调节,减速机构承担动力传递任务。系统运行过程中易出现电机过热、绕组短路、轴承磨损及转矩异常等问题,故障与电磁负载变化、机械振动及冷却条件密切关联。电机过热多出现在高负载工况,冷却液泄漏或管路受阻会导致散热能力下降,温度升高后触发控制器限功策略,表现为加速响应减弱。绕组短路与绝缘退化、受潮或异物侵入相关,相电流异常上升伴随转速与转矩波动[4]。轴承磨损受高速运行与润滑状态影响,运行中产生异响与振动增强。转矩异常与控制器、传感信号及控制逻辑状态相关,动力输出呈现不连续变化。
1.3 充电系统故障
北汽极狐纯电动汽车充电系统由车载充电机OBC 充电接口 高压连接结构及充电控制模块构成,支持交流慢充与直流快充两种模式,依赖充电协议实现车辆与充电桩之间的通信与功率匹配。系统运行 充电效率下降及通信异常等问题,故障与接口接触状态、协议匹配关系、电网电压及设备工作状态相关。 多与接口针脚氧化、接触不良、高压回路熔断或充电机保护动作有关[5]。充电效率下降体现在充电功率偏低 交流模式 与线缆条件影响,直流模式与电池温度及充电策略相关,当电池温度低于0℃或高于 45℃时功率受到限制。 无法启动充电,多由通信针脚故障、控制模块异常或协议适配偏差引发。
1.4 电子控制系统故障
北汽极狐纯电动汽车电子控制系统以整车控制器VCU 为核心,协同电池管理系统 BMS、电机控制器 MCU 及各类传感器与执行单元构成,依托 CAN 总线完成信息交互与指令传递。系统运行过程中易出现控制逻辑异常、通信中断及软件运行异常,故障与控制单元硬件状态、通信线路状态及软件运行环境相关。控制逻辑异常多与 VCU 参数偏差或传感器信号失真相关,加速踏板信号异常会导致控制判断偏离,表现为动力响应异常。通信中断源于 CAN 线路短路、断路或终端电阻状态异常,信息传输受阻后控制器无法获取关键运行数据。软件运行异常涉及控制程序缺陷或升级过程异常,升级中断会导致系统运行状态紊乱并伴随故障码异常。
1.5 辅助系统故障
北汽极狐纯电动汽车辅助系统涵盖空调系统、DC/DC 转换模块、低压供电系统及附属设备,空调系统承担车内温度调节与电池热管理任务,DC/DC 转换模块完成高压向12V 低压电转换,低压供电系统维持各类用电设备运行。系统运行过程中易出现 PTC 加热异常、低压供电不稳及附属设备故障,故障与部件老化、线路接触状态及控制模块运行情况相关。PTC 加热异常多与加热器本体或控制线路状态异常相关,表现为车内制热功能受限与电池预热能力下降。低压供电不稳多由 DC/DC 转换模块运行异常或低压电瓶状态偏差引发,车灯亮度变化与车机运行异常较为明显。附属设备故障涉及雨刮、影像系统及声响装置,故障多源于元件损伤或线路状态异常。
2 北汽极狐纯电动汽车(EV)常见故障诊断方法
2.1 动力电池系统故障诊断
北汽极狐纯电动汽车动力电池系统故障诊断依据如图1 所示,诊断起点为绝缘是否正常,完成高压断电后进行绝缘检测,绝缘值偏离范围时进入检查绝缘故障并排除路径,对电池包、高压线束及相关连接位置进行排查。绝缘状态正常后进入仪表通信状态检测,仪表通信异常时转入检查并修复 VCU、仪表路径,恢复通信后继续后续判断。
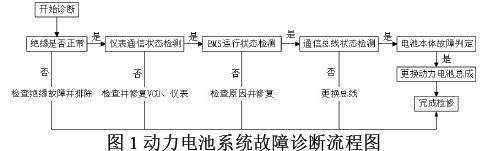
在通信状态稳定前提下进入BMS 运行状态检测,读取电压、电流及温度数据,结合运行状态识别电压不一致或温度异常等故障特征,状态异常时进入检查原因并修复路径。BMS 运行状态正常后进入通信总线状态检测,检测通信线路与终端状态,通信异常时执行更换总线处理。各项检测均正常时进入电池本体故障判定,根据运行数据判定故障位置,确认后执行更换动力电池总成并完成检修。
2.2 驱动电机系统故障诊断
北汽极狐驱动电机系统的故障诊断需基于多参数判据,结合驱动电机系统典型故障诊断参数对照表的核心数据,从电机温度、相电流、转速偏差及振动特征四个关键参数入手,通过参数检测、数据对比与趋势分析,识别电机过热、绕组短路、轴承磨损及转矩异常等故障类型,实现对驱动电机系统故障的精准诊断。北汽极狐驱动电机系统的故障诊断前需启动车辆,驱动电机处于空载或轻载运行状态,使用专用诊断仪与检测设备同步采集各项参数,同时记录参数的变化趋势,将检测数据与标准参数进行对比,如表 1 所示。
表 1 驱动电机系统典型故障诊断参数对照表

当电机温度升至112.46℃,相电流 95.21A,转速偏差 3.74%,振动值1.92mm·s-1,且温升速率随负载变化持续加剧,可判定电机过热故障。若相电流升至136.82A,电机温度 78.35℃,转速偏差 5.63%,振动值 2.47 ,表现为电流异常波动并伴随转速不稳定,可判定绕组短路故障。振动值达到 4.86mm·s-1,而电机温度69.28℃、相电流 88.16A、转速偏差 2.14%接近稳定区间,可判定轴承故障。各参数接近正常但存在动力响应不连续或输出波动现象时,可判定转矩异常故障,诊断过程依赖参数对比与趋势分析实现故障识别与定位。
2.3 充电系统故障诊断
北汽极狐充电系统的故障诊断需围绕充电过程中的电压、电流及通信信号状态,依据充电中断、充电效率下降及通信异常等表现建立分步排查路径,结合交流慢充与直流快充工况进行针对性检测。诊断初期记录充电模式、充电桩类型及故障出现阶段,对充电功率变化、连接状态及持续时间进行判断,明确故障发生区间。
排查过程从充电接口入手,检查针脚氧化、变形及接触状态,确认电源针脚与通信针脚连接情况。随后对充电线路与高压连接结构进行通断检测,检测高压熔断器状态并分析异常原因。进一步对车载充电机OBC 及充电控制模块进行数据检测,分析输入输出电压与电流变化趋势。在此基础上检测电池管理系统运行状态,结合电池温度与电芯压差数据识别充电限制行为,同时对通信信号进行检测,排查通信线路与控制模块运行状态,并核对充电协议适配情况,逐步缩小故障范围,实现充电系统故障定位。
2.4 电子控制系统故障诊断
北汽极狐电子控制系统的故障诊断基于整车控制网络与数据交互机制,以故障码读取、通信状态检测及控制信号分析为核心方法,结合 BMS、MCU、VCU 运行数据进行综合判定。诊断起点为故障码读取,专用诊断仪接入OBD 接口后进入控制系统诊断界面,读取各控制单元故障码与冻结帧数据,依据报码类型与运行记录判断故障范围,同时分析历史报码识别故障变化规律。
在故障码信息基础上开展通信状态检测,对CAN 总线通信电压、波形及终端电阻进行检测,正常状态下 CAN_H 约 3.5V,CAN_L 约1.5V,终端电阻 120Ω,若电压异常或波形失真,可判定通信中断并逐段排查线路与通信模块。随后进行控制信号检测,对加速踏板、制动踏板及电机位置等信号进行测量,判断信号幅值与变化状态是否偏离标准,同时核查 VCU 控制参数。软件运行异常需检查控制单元软件版本与升级状态,确认系统运行条件,实现电子控制系统故障定位。
3 北汽极狐纯电动汽车(EV)常见故障维修方案
3.1 动力电池系统故障维修
北汽极狐纯电动汽车动力电池系统故障维修建立在故障定位结果基础上开展,作业前完成高压断电并进行绝缘防护,维修路径依据绝缘状态、电压一致性及温度状态进行分项处理。绝缘下降故障定位至高压线束时需更换原厂线束并恢复固定与防护状态,定位至电池舱进水时需拆卸电池包进行排水与干燥处理,同时检查电芯壳体与密封结构并更换损伤部件,充电口针脚氧化或烧蚀需进行清洁或更换充电口总成,维修完成后使用兆欧表检测绝缘电阻并恢复至标准范围。
电压不一致故障依据压差范围采取不同维修方式,压差处于0.2V-0.5V 时使用均衡设备进行离线均衡处理,压差超过0.5V 或存在性能异常电芯时需拆卸电池包更换电芯或模组,并进行匹配与均衡调整。温度异常故障需对散热风扇、冷却管路及循环系统进行检修,风扇失效进行更换,冷却液循环异常时完成管路清理与补液处理,同时检查温度传感器状态并进行校准,使电池运行温度维持在 0-60℃区间。
容量衰减故障依据容量检测结果实施维修,质保范围内且容量低于额定值80%执行电池包更换,超出质保范围时依据衰减程度更换电芯或模组并进行容量恢复检测。维修完成后恢复高压连接并进行上电检测,使用诊断设备读取数据流并清除故障记录,结合整车运行状态确认电池系统恢复正常。
3.2 驱动电机系统故障维修
北汽极狐驱动电机系统的维修需结合故障类 却系统维护等维修措施,维修过程中需注重装配精度与部件匹配性,确保维修后 密封与防护,避免故障复发。电机过热故障定位至冷却系统时需检查冷却液状态与 对冷却风扇异常进行更换,同时完成冷却系统排气处理,使循环恢复稳定;温度传感器异常时更换传感器并进行参数校准,电机长时间高负载运行引起温升需进行停机降温处理。
绕组短路故障需拆卸驱动电机进行检测,轻微短路采用绝缘修复与浸漆处理恢复绕组状态,严重短路或烧毁需重新绕制绕组或更换电机总成,绕制过程遵循原厂匝数与线径标准,完成后进行绝缘与通断检测。轴承磨损故障需拆卸端盖更换原厂轴承,调整配合间隙并补充高温润滑脂,对转子与定子接触情况进行检测并修复受损部位。
转矩异常故障依据控制信号与控制单元状态开展维修,传感器信号异常需更换并校准,控制参数偏差需进行参数匹配调整,控制单元故障需更换总成并完成系统匹配。维修完成后进行空载与负载运行检测,读取运行参数并结合整车工况验证电机系统运行状态。
3.3 充电系统故障维修
北汽极狐充电系统的维修需针对充电接口、车载充电机、高压线路及充电控制模块等故障部位,采取检修、更换、校准等维修措施,维修过程中需注重电气连接的可靠性与通信信号的稳定性,维修后需进行不同模式的充电测试,确保充电系统恢复正常运行状态。充电接口故障处理需检查针脚状态,针脚氧化或接触 ,针脚变 时更换接口总成并恢复密封状态。高压线路与熔断器异常需对接线端子进行紧固与绝缘处理,线路破损时更换原厂线路,熔断器损坏时更换同规格部件并排查电流异常来源。
车载充电机故障维修依据损伤程度 行元件更 功能恢复,严重损坏时更换整机并完成参数匹配与校准。充电控制模块异常需对通 恢复通信状态。 池管理系统限制引起故障需先处理电芯压差与温度状态,再对充电策略进行调整。 修复通信线路并校验协议匹配状态。维修完成后开展交流与直流充电检测,连接不同充电设备验证连接状态与功率变化,同时读取数据流并清除故障记录,确认充电过程运行稳定。
3.4 电子控制系统故障维修
北汽极狐电子控制系统的维修以恢复数据交互 与控制逻辑为核心,针对控制器软件、通信线路、控制参数等不同故障点,采取软件恢复、线路检修、参数校准等维修措施, 制单元的匹配性与软件版本的一致性,确保维修后整车各系统协同运行。软件运行异常时,需使用专用诊断设备对 VCU 等控制单元进行软件刷新与升级,恢复至原厂版本并保持电源稳定,避免升级中断;若为偶发异常,可执行故障码清除与控制单元重启,完成后对功能状态进行检测。
通信中断故障需对 CAN 总线线路进行检修,针对短路或断路问题进行修复或更换,对接线端子进行紧固处理,使连接状态恢复稳定;
终端电阻异常需更换并恢复至 120Ω标准值, 通信模块异常需更换控制单元并完成系统匹配,随后检测通信电压与波形,确认数据交互恢复。控制逻辑异常故障需对传感器与执行单元开展维修,传感器异常进行更换与校准,执行器异常进行修复或更换,同时对VCU 控制参数进行重新匹配,使控制信号恢复一致。信号干扰故障需排查干扰来源,对线路屏蔽结构进行修复并恢复抗干扰状态。维修完成后读取控制系统数据并清除故障记录,结合整车运行状态验证控制逻辑恢复情况。
4 典型故障维修案例分析
4.1 案例信息
选取北汽极狐纯电动汽车动力电池绝缘故障作为研究对象,测试数据来源于维修站实际检测记录与模拟工况复测数据,车辆行驶里程为 8.72 万 km,长期处于高湿环境运行。故障表现为高压系统无法上电,仪表提示绝缘异常,充电功能受限。为验证诊断方法与维修路径有效性,设置维修前状态与维修后状态两组数据,对比绝缘值、电压稳定性及系统运行状态变化。
4.2 诊断过程
诊断依据动力电池系统检测流程开展,检测步骤覆盖绝缘检测、数据读取与通信状态判定。绝缘检测采用 1000V 兆欧表对高压回路进行测量,记录绝缘电阻数值;电压稳定性采用诊断仪读取单体电芯电压数据,计算最大压差;系统运行状态依据 BMS 数据流与故障报码进行判定。检测结果显示维修前绝缘电阻低于标准范围,电芯电压存在偏差,结合环境条件判定电池舱存在进水风险,并进一步排查高压连接结构与密封状态。
4.3 维修方案实施
依据诊断结果实施针对性维修,对电池包进行拆卸处理,开展电池舱排水与干燥作业,修复密封结构并更换损伤部件,同时对高压连接位置进行清理与绝缘处理。完成结构修复后,对电芯进行均衡处理,恢复电压一致性,并对 BMS 进行数据校验。维修过程中控制作业环境湿度,避免二次受潮,完成维修后进行高压上电检测,读取系统数据,确认绝缘状态与电压状态恢复正常。
为验证维修方法有效性,选取绝缘电阻值、电芯电压偏差及系统运行状态作为评价指标,绝缘电阻采用兆欧表测量高压回路绝缘值,电压偏差由诊断仪读取单体电压并计算差值,系统运行状态依据 BMS 数据与整车运行表现综合判定。测试结果如下表1 所示。
表 1 动力电池绝缘故障维修前后关键参数对比表

维修前绝缘电阻312.48MΩ处于低水平, 池舱结构排查,锁定密封失效与连接部位受潮因素,实施干燥处理与密封修复后绝缘 电芯电压偏差由 0.38V 降至 0.09V,反映均衡处理对电芯一致性调节效果显著,电压分布趋于集中 BMS 数据判定精度同步提升。 系统运行状态评分由62.74 升至 93.68,与绝缘恢复与电压一致性改善形成对应关系,表明诊断路径中绝缘检测、数据判定与结构修复策略形成有效联动,电池系统运行条件得到重建。
本文围绕北汽极狐纯电动汽车典型故障特征 ,构建以动力电池、驱动电机、充电系统及电子控制系统为核心的分系统诊断与维修技术路径,系统分析各类故障表 据实现故障识别与定位,并针对不同故障类型制定对应维修措施,同时引入动力电池绝缘故障案 修实施效果进行验 形成结构清晰、路径明确的技术体系。未来研究可进一步结合大数据监测与智能诊断模型,提升故障预测能力与远程运维水平,推动纯电动汽车故障维修向数据化与智能化方向发展。
参考文献
[1]周莹,马慧. 纯电动汽车动力电池故障诊断与维修技术研究[J].汽车维修技师,2026,(06):21-22.
[2]张凯. 新能源汽车电驱系统故障诊断与维修技术研究[J].汽车电器,2026,(03):180-181.
[3]王洪. 智能网联汽车电机驱动系统故障排查与维修策略[J].时代汽车,2026,(05):121-123.
[4]戴荣航. 新能源汽车电机控制器故障诊断方法与维修应用研究[J].汽车维修与保养,2026,(03):147-148.
[5]李琛. 纯电动汽车电控系统高压故障的检修流程优化[J].汽车与新动力,2025,8(06):68-70.

 京公网安备 11011302003690号
京公网安备 11011302003690号


