



- 收藏
- 加入书签

基于OpenCV的全自动消防预警机器人的设计与实现
 打开文本图片集
打开文本图片集

基金项目:2023年省级大学生创新创业训练计划项目,项目编号(202310066081)
摘要:近年来,火灾频发对人民生命财产安全构成了严重威胁。据国家消防救援局统计,2024年消防救援队伍共接报火灾90.8万起[1],造成大量人员伤亡和经济损失。本项目设计的“基于OpenCV的全自动消防预警机器人”,融合OpenCV计算机视觉技术与SLAM(同步定位与建图)算法[2],配备激光雷达[3]、烟雾与温度传感器,可在楼宇内自动建图导航、智能识别火灾隐患,将高清视频及预警信息实时上传至管理端APP或消防监控中心,支持远程操控与任务调度。该项目极大提升了消防预警系统的智能化水平与响应效率,填补了传统机器人在早期火灾预警环节的技术空白,为构建“主动防御、智能感知、快速响应”的现代智慧消防体系提供了有力支撑。
关键词:STM32,OpenCV,机器视觉,SLAM技术
0引言
近年来社会多起重大火灾事故引发公众关注。2024年河南大学大礼堂失火事故[4]中,承载着九十年载历史和文化底蕴的大礼堂毁于一旦;春节期间,频繁发生因烟花爆竹引发的居民区火灾;更早前,2015年天津港爆炸事故[5]造成重大人员伤亡与财产损失。随着《“十四五”应急产业发展规划》《消防装备发展规划(2021—2025 年)》等政策导向,我国政府也正在加快应急装备智能化升级的步伐。因此,研发具备自主导航、智能识别和远程预警能力的全自动消防预警机器人,已成为现代智慧消防建设的迫切需求。
目前,各类高层建筑、工业园区、校园楼宇等场所日益密集,火灾风险随之增加,特别是在夜间或人员稀少时段,传统人工巡查方式效率低、响应慢、易遗漏,已难以满足现代消防安全的需求。尽管当前市场上已有如履带式灭火机器人[6]、高压水炮机器人等消防装备投入使用[7],但多数集中于火灾发生后的灭火环节,缺乏对火情的早期识别与精准预警能力。此外,这些机器人普遍存在路径规划能力弱、图像识别精度低、适应复杂建筑环境能力不足、续航短等问题,制约了其在实际火灾防控中的应用效果。
针对上述问题,本项目提出并设计了一款基于OpenCV的全自动消防预警机器人。本项目融合了多种前沿技术,具备智能化程度高、反应速度快、环境适应性强等显著技术特点。系统以 STM32F407 为控制核心,结合 OpenCV 视觉识别算法,实现对火焰、烟雾等火灾特征的实时检测与定位;通过集成红外传感器、火焰传感器、与 MPU6050 姿态检测模块,机器人可自主完成巡逻、障碍物规避与姿态调整,确保在复杂环境下稳定运行;项目搭载的 5G 通信模块支持远程高清视频传输与信息交互[8,9],实现远程监控与智能指令下发。此外,系统还配备自动更换灭火材料(水/干冰)的喷嘴装置,能在确保安全距离内高效完成灭火操作,具备极强的实战应用价值和推广前景。
1消防预警机器人工作原理
图1为“基于 OpenCV 的全自动消防预警机器人”的设计图。该项目是一种集智能巡逻、火情识别、联动报警与自动灭火于一体的综合性消防系统。系统启动后,机器人自动巡逻并通过摄像头实时采集环境图像,利用OpenCV 技术检测火焰、烟雾等火灾早期特征。一旦发现异常,立即启动蜂鸣器与警示灯进行本地预警,同时靠近火源,采集更清晰画面,并将火情信息(图像、位置、时间等)通过无线网络同步上传至远程平台,便于后台及时掌握警情。系统可根据火源区域或火焰特征自动切换喷嘴,选择合适的灭火材料(如水或干冰)实施精准喷射,完成初步灭火操作。同时记录检测日志与处理过程,支持后期分析与追溯。远程平台亦可下发控制指令,协同机器人执行语音疏散、持续灭火等操作。警情处理结束后,机器人恢复巡逻,实现“巡逻—识别—预警—报警—灭火—联动—巡逻”的闭环流程,有效提升火灾响应的智能化与实用性。全过程如图2。
2硬件系统的设计与实现
(1)驱动拓展板
在本项目中,我们在STM32F407正点原子开发板的基础上自主设计了专用驱动拓展板。该拓展板不仅集成了统一的电源管理模块,实现了对多个子模块的稳定供电,还通过扩展IO引脚和串口资源,有效解决了原开发板接口不足的问题,从而支持了多路舵机、步进电机、激光雷达、摄像头等复杂外设的同时接入与稳定通信。
(2)基于MPU6050的N10激光雷达
该项目中,通过集成MPU6050 六轴姿态传感器与 N10 激光雷达模块,实现了机器人在复杂环境中的精确定位与路径规划。MPU6050可实时获取机器人的加速度与角速度信息,配合算法实现自我姿态判断与运动状态检测,确保机器人在移动、转向或震动环境下仍具备良好的稳定性与控制能力。而 N10 激光雷达则通过高精度测距与环境建图功能,使机器人能够自主避障,定点导航,确保机器人在烟雾弥漫或光线不足等极端场景下依然具备高效可靠的火源搜寻与应对能力,从而显著提升系统的智能性、安全性与应急反应速度。
(3)升降云台机械设计
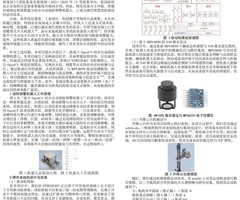
升降云台作为本项目的核心执行机构,在设计过程中,我们首先通过solidworks三维制图软件对该结构进行模块化设计,使用基本的草图工具在装配文件中云台的主体框架,包括电机[10]、滑块和立柱平台等。然后将各个零件组合到主体框架上,完成总体装配。接着,结合高强度铝合金结构,3D打印结构与精密传动系统,使其具备良好的稳定性与可扩展性。
随后,我们通过机械建模运动仿真,在matlab上对其运动轨迹进行数学建模,以二号舵机转台所控制的灭火器喷嘴为研究对象,得到其运动轨迹如下:
3机器视觉的设计与执行
本项目的机器视觉系统基于OpenCV开发,已完成图像采集、火焰识别算法部署[11]与多场景适配优化。系统采用HSV颜色空间分割算法结合轮廓提取与连通域分析,能够在复杂背景中准确识别火焰区域[12]。
为提高识别鲁棒性,团队构建了自有火焰图像数据集,并通过图像预处理(如自适应阈值滤波、形态学开闭运算)提升检测稳定性。训练效果如图所示。
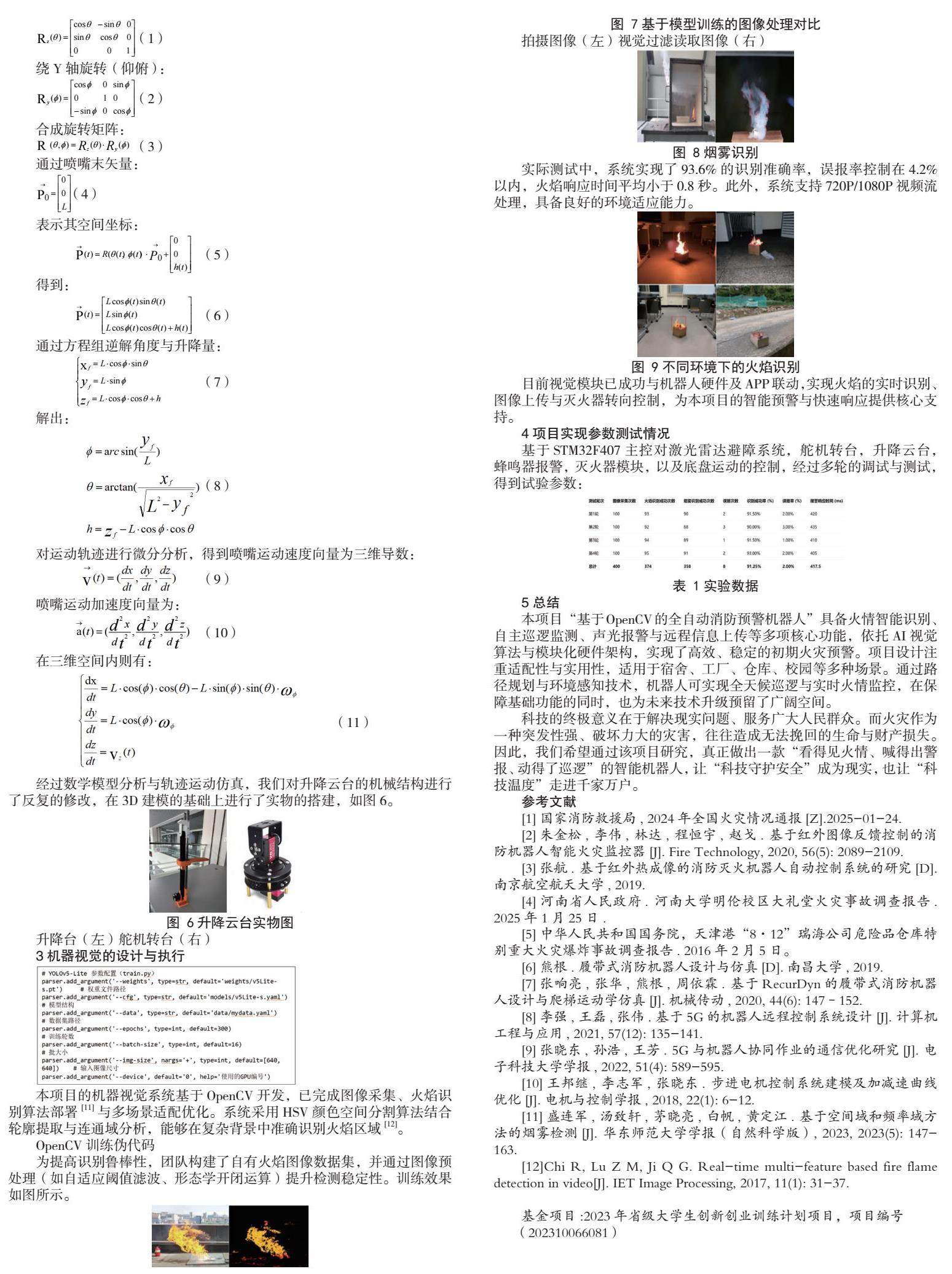
实际测试中,系统实现了93.6%的识别准确率,误报率控制在4.2%以内,火焰响应时间平均小于0.8秒。此外,系统支持720P/1080P视频流处理,具备良好的环境适应能力。
目前视觉模块已成功与机器人硬件及APP联动,实现火焰的实时识别、图像上传与灭火器转向控制,为本项目的智能预警与快速响应提供核心支持。
4项目实现参数测试情况
基于STM32F407主控对激光雷达避障系统,舵机转台,升降云台,蜂鸣器报警,灭火器模块,以及底盘运动的控制,经过多轮的调试与测试,得到试验参数:
5总结
本项目“基于OpenCV的全自动消防预警机器人”具备火情智能识别、自主巡逻监测、声光报警与远程信息上传等多项核心功能,依托AI视觉算法与模块化硬件架构,实现了高效、稳定的初期火灾预警。项目设计注重适配性与实用性,适用于宿舍、工厂、仓库、校园等多种场景。通过路径规划与环境感知技术,机器人可实现全天候巡逻与实时火情监控,在保障基础功能的同时,也为未来技术升级预留了广阔空间。
科技的终极意义在于解决现实问题、服务广大人民群众。而火灾作为一种突发性强、破坏力大的灾害,往往造成无法挽回的生命与财产损失。因此,我们希望通过该项目研究,真正做出一款“看得见火情、喊得出警报、动得了巡逻”的智能机器人,让“科技守护安全”成为现实,也让“科技温度”走进千家万户。
参考文献
[1]国家消防救援局, 2024年全国火灾情况通报[Z].2025-01-24.
[2]朱金松, 李伟, 林达, 程恒宇, 赵戈. 基于红外图像反馈控制的消防机器人智能火灾监控器[J]. Fire Technology, 2020, 56(5): 2089-2109.
[3]张航. 基于红外热成像的消防灭火机器人自动控制系统的研究[D].南京航空航天大学, 2019.
[4]河南省人民政府. 河南大学明伦校区大礼堂火灾事故调查报告. 2025年1月25日.
[5]中华人民共和国国务院,天津港“8·12”瑞海公司危险品仓库特别重大火灾爆炸事故调查报告. 2016年2月5日。
[6]熊根. 履带式消防机器人设计与仿真[D].南昌大学, 2019.
[7]张响亮, 张华, 熊根, 周依霖. 基于RecurDyn的履带式消防机器人设计与爬梯运动学仿真[J]. 机械传动, 2020, 44(6): 147–152.
[8]李强, 王磊, 张伟. 基于5G的机器人远程控制系统设计[J]. 计算机工程与应用, 2021, 57(12): 135-141.
[9]张晓东, 孙浩, 王芳. 5G与机器人协同作业的通信优化研究[J]. 电子科技大学学报, 2022, 51(4): 589-595.
[10]王邦继, 李志军, 张晓东. 步进电机控制系统建模及加减速曲线优化[J]. 电机与控制学报, 2018, 22(1): 6-12.
[11]盛连军, 汤致轩, 茅晓亮, 白帆, 黄定江. 基于空间域和频率域方法的烟雾检测[J]. 华东师范大学学报(自然科学版), 2023, 2023(5): 147-163.
[12]Chi R, Lu Z M, Ji Q G. Real-time multi-feature based fire flame detection in video[J]. IET Image Processing, 2017, 11(1): 31-37.

 京公网安备 11011302003690号
京公网安备 11011302003690号


