



- 收藏
- 加入书签

多光谱雷达在雾霾诊断中的应用
摘要:本研究基于黑龙江省哈尔滨市2024 年2 月至2025 年2 月多光谱拉曼雷达观测数据及同步气象六要素自动监测数据,分析了雾、霾过程中多光谱雷达信号特征,探究了多光谱雷达对雾、霾监测优势。结果表明,哈尔滨地区雾霾往往集中于春秋两季,且其形成过程中往往伴随着逆温的产生及对应逆温层顶的高度升高。气溶胶消光系数和退偏比在近地面处最高,高度超过 200 米后显著下降。 355nm 与 532nm 波段消光系数与颗粒物浓度的拟合关系在不同浓度区间表现各异,污染事件中光学参数标准差较大。雨、雪、云等天气现象会降低雷达信噪比。通过这一研究,为利用多光谱雷达诊断与预报雾霾提供了依据。
关键词:多光谱拉曼雷达;雾霾;气象条件
1 引言
近年来,雾霾对人类生活的影响日益凸显,据IQAir发布的《2024年全球空气质量报告》显示,2024 年,全球仅有 17% 的城市达到世卫组织 PM2.5 指导标准,我国全国年均 PM2.5 浓度虽从 2023 年的 32.5μg/m3 下降至 2024 年的  ,但雾霾问题依旧对人们的生产生活造成了极大的困扰。因此,雾霾的监测与治理成为边界层研究热点。在国际层面上,早在 1976 年,Pinnick 就通过气球携带粒子计数器的方式观测雾和霾的垂直结构 [1]。此后,Hansen 等人进一步通过光散射颗粒物测量仪和震荡天平等仪器,对当地的PM2.5 和 PM10 进行了连续性测量 [2]。如今,霾区的识别以美国国家航空航天局的 V5.2 算法为主[3]。在20 世纪70 年代,我国就针对大气污染问题,通过了《关于保护和改善环境的若干规定》,确立了针对污染治理的若干原则。有关研究也随之蓬勃发展,如对非均匀雾霾图像增强算法的研究 ;针对气象因子影响雾霾扩散的探究等 [5]。
,但雾霾问题依旧对人们的生产生活造成了极大的困扰。因此,雾霾的监测与治理成为边界层研究热点。在国际层面上,早在 1976 年,Pinnick 就通过气球携带粒子计数器的方式观测雾和霾的垂直结构 [1]。此后,Hansen 等人进一步通过光散射颗粒物测量仪和震荡天平等仪器,对当地的PM2.5 和 PM10 进行了连续性测量 [2]。如今,霾区的识别以美国国家航空航天局的 V5.2 算法为主[3]。在20 世纪70 年代,我国就针对大气污染问题,通过了《关于保护和改善环境的若干规定》,确立了针对污染治理的若干原则。有关研究也随之蓬勃发展,如对非均匀雾霾图像增强算法的研究 ;针对气象因子影响雾霾扩散的探究等 [5]。
基于大气散射机制的多光谱拉曼雷达具有能够通过高效获取目标的物性成分与光谱特征信息的优点,在大气遥感中有较多的应用[6]。如有学者运用微脉冲激光雷达测量分析得出了气溶胶消光系数的垂直分布 [7];有的学者基于星载激光雷达 (CALIOP) 数据,探究了京津冀地区气溶胶垂直分布特征及其对于污染物分布的影响[8];有学者基于多光谱激光雷达分析了 2019 年 10 月北京城区空气污染、污染沙尘、纯沙尘的气溶胶光学特性 [9];还有学者通过自行研制的多波长激光雷达系统,对多种天气条件下气溶胶光学特性和粒径分布特征开展了观测分析[10]。
总体而言,国内外在多光谱雷达诊断雾霾方面已具备一定理论与数据基础,但在技术成熟度、数据系统性、模型精细化及跨学科应用转化等方面仍有提升空间。一方面,雾霾天气的发生与多种气象因素密切相关,不同天气现象均会对雾霾的形成与消散产生影响,而传统观测方式往往只能观测单一项目,从而使对雾霾现象的判断存在较大的误差,而多光谱雷达能够同步提供 355nm 与 532nm 双波段各高度消光系数、退偏比等数据及对应垂直廓线,并能同期测量大气温湿度,进而通过多参数分析有效降低判断失误概率。另一方面,由于雾、霾等性质完全不同的天气现象在实际中存在相互转换过程,要将两者完全分开难度极大 [11]。基于此,团队利用多光谱拉曼激光雷达,通过分析不同波段的消光系数、退偏振比与信噪比等特征,结合气象条件,旨在提取雾、霾关键识别特征,探究多光谱雷达对雾、霾的监测及预测优势,为我国东北地区气溶胶研究积累案例,以期为雾霾监测预报提供依据。并为雾霾预报探索新途径。
2 数据与方法
2.1 数据来源
本实验基于中科院安徽光学精密机械研究所研制多光谱拉曼雷达,使用 355nm 弹性通道和 532nm 平行和垂直偏振通道两个系统通道获取对应粒子退偏振比。各通道回波信号均已进行了几何因子校正。此外,项目组还结合了来自世界各地即时空气品质与天气资料(AQI.in)的全球空气质量监测数据及同步气象观测数据,并利用Origin 进行拟合分析,力求得到较为准确的结果。
2.2 拉曼散射效应
拉曼散射效应即光子与物质分子发生非弹性碰撞后,散射光频率发生偏移的现象。其原理为入射光与分子相互作用,当入射光子(频率  )与分子碰撞后,部分光子能量转移至分子振动能级(斯托克斯线,频率
)与分子碰撞后,部分光子能量转移至分子振动能级(斯托克斯线,频率  ),或从分子振动能级吸收能量(反斯托克斯线,频率 u0+Δν ),而散射光与入射光的频率差( Δν⋅ )即对应着分子振动 / 转动能级的变化 [12-13]。而拉曼光谱能够捕捉到这些振动信息,形成特征光谱峰,从而反映化学键类型及分子结构 [14]。
),或从分子振动能级吸收能量(反斯托克斯线,频率 u0+Δν ),而散射光与入射光的频率差( Δν⋅ )即对应着分子振动 / 转动能级的变化 [12-13]。而拉曼光谱能够捕捉到这些振动信息,形成特征光谱峰,从而反映化学键类型及分子结构 [14]。
拉曼散射强度约为瑞利散射的 10-6 ,需通过高灵敏度探测器捕捉。但具有无需样品预处理、非破坏性、高空间分辨率等优点,适用于极性物质(如水)含量高的样品分析。
2.3 多光谱拉曼激光雷达组成及原理
激光雷达通常主要由激光发射单元,接收后继光学单元,信号探测与采集单元,运行控制单元,数据处理与显示单元五部分组成,其探测原理为雷达接收大气中的各种粒子与激光产生相互作用后产生的散射回波信号 [15]。若假定激光雷达发射的激光脉冲功率为 Pt, 接收到位于距离 R 处的大气散射的回波功率为 Pr ,则可推导出两者之间的关系式为

式中, Ae 为有效接收面积, β (R)为后向散射系数,(R)为充满系数,ɑ(r)为消光系数, Tsys 为收发望远镜的透过率[16]。
2.4 AOD 值
由中华人民共和国环保部发布的关于征求国家环保所标准《灰霾污染日判别标准 ( 试行 )》( 征求意见稿 ) 可知,AOD 值为反映空气中粗细颗粒物占比因子,当 AOD 值大于 0.6 时,即表示空气中的颗粒污染物以人为污染产生的细颗粒物为主,若 AOD 值小于 0.3,则表示空气中的颗粒污染物以粗颗粒为主[17]。其具体计算公式如下
3 数据分析结果及讨论
3.1 多光谱拉曼雷达对雾霾的时空分布的探测分析
通 过 分 析 2024 年 2 月 19 日 至 2025 年 2 月 23 日 PM 值( 图1)及 AOD 值(图 2)可知,此时间段哈尔滨市空气污染天气主要集中在春秋两季,其中又以 10 月和 11 月两个月最为严重,最严重的一次污染发生在 2024 年 11 月 12 日,期间 PM10 浓度最高可达273μg/m3 ,PM2.5 浓度最高可达 231μg/m3. 。由图2 可知,2 月19 日—3 月 22 日和 11 月 11 日—次年 2 月 19 日两段时间内,及 PM 值出现的几次峰值对应AOD 值均在0.6 以上,表示污染物多为细颗粒物。另一方面,结合对应 AQI 全球空气质量检测历史数据,可知该雷达测量结果准确性较好,能够满足实际生产生活的需求。
图 1 哈尔滨市区 2024 年 2 月 19 日至 2025 年 2 月 23 日 PM 值统计图
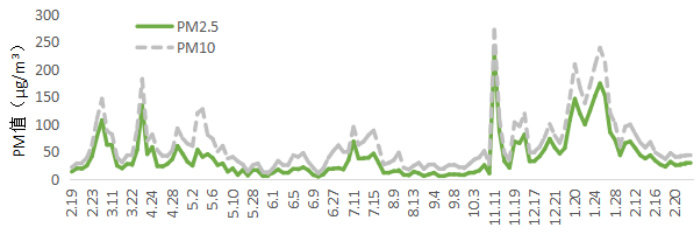
图 2 哈尔滨市区 2024 年 2 月 19 日至 2025 年 2 月 23 日 AOD 值统计图
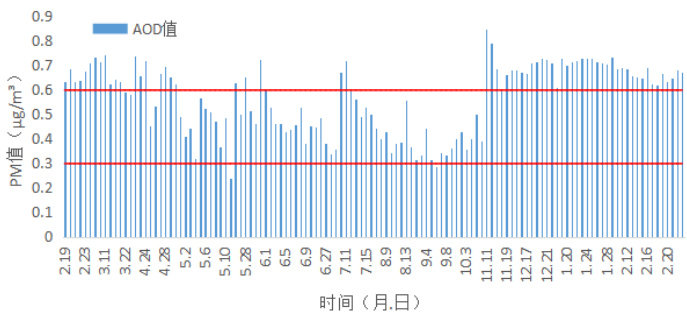
(两条红线分别为 AOD=0.6 ; AOD=0.3 )
3.2 多光谱拉曼雷达对雾霾发展气象要素监测
3.2.1 多光谱拉曼雷达对逆温的监测
雾、霾的发生多伴随逆温现象。通过分析多光谱拉曼雷达检测结果可以看出,雷达垂直温度监测不仅可以判断逆温过程发生的位置及时间,还可监测雾、霾过程中逆温的演变特征。以 2024 年 2月 1 日 15 时至 2024 年 2 月 2 日 16 时霾的发生过程为例,在过程发生前,大气温度层结从2024 年2 月1 日14 时开始在距地高度为0.9千米至1.4 千米处出现逆温,且随霾的发展,逆温层顶高度升高(如图3(a)(b)所示)。
图3 雾霾发生过程及对应逆温变化
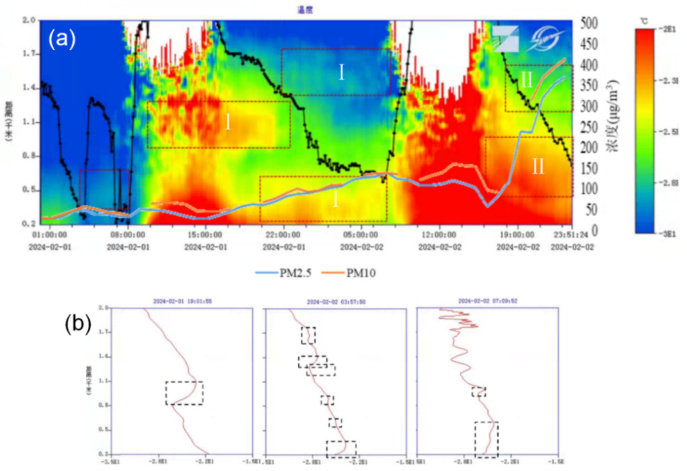
(图(a)为雷达所测得 2024 年 2 月 1 日—2024 年 2 月 2 日温度及对应时间段内雾霾浓度变化,图中用红色框线圈出地方为逆温层顶,图中标记Ⅰ、Ⅱ分别代表第一次与第二次雾霾事件期间的逆温层顶高度。;图(b)为 2024 年 2 月 1 日 15 时—2024 年 2 月 2日16 时期间对应典型逆温时段雷达温度廓线图)
3.2.2 多光谱拉曼雷达对相对湿度的监测
高湿度(通常相对湿度 >70% )能够加重大气细颗粒物污染。通过分析多光谱拉曼雷达对应检测结果可知,雷达针对相对湿度的监测不仅可以判断相对湿度的大小,还可监测雾、霾发展过程中相对湿度的变化特征特征。通过对几次典型雾霾发展过程对应相对湿度变化的观测分析。可知霾的发展往往伴随着相对湿度的升高(如图4 所示)。
时间(月.天)
图4 空气污染浓度与对应温湿度对比图
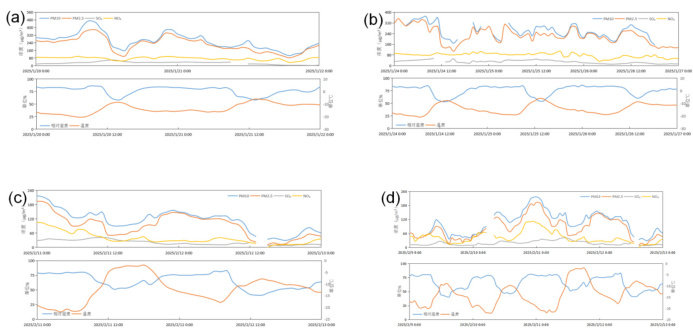
(上图为空气污染物浓度曲线图,下图为对应时间段内空气温湿度。其中图 a 为 2025 年 1 月 20 日 0 时—1 月 22 日 0 时空气污染物浓度与温湿度对比图;图 b 为 2025 年 1 月 24 日 0 时—1 月 27 日0 时空气污染物浓度与温湿度对比图;图c 为2025 年2 月11 日0 时—2 月 13 日 0 时空气污染物浓度与温湿度对比图;图 d 为 2025 年 2月9 日0 时—2 月13 日0 时空气污染物浓度与温湿度对比图)
3.3 多光谱拉曼雷达对天气现象的监测
雾、霾的形成与发展往往与天气现象存在密切联系。通过分析多光谱拉曼雷达对应检测结果,可知雷达可通过对应光学特性分析判断观察到具体天气现象,并可通过其与同时段空气污染物浓度的变化分析得到其对空气污染物浓度的影响。通过对几次典型雾霾发展过程对应天气现象的观测分析。可知降水往往可以加快霾的消散速度(如图 5(a)所示),而云和冰云与霾的形成存在密切关系,往往可以促进霾的形成(如图5(b)、(c)所示)。
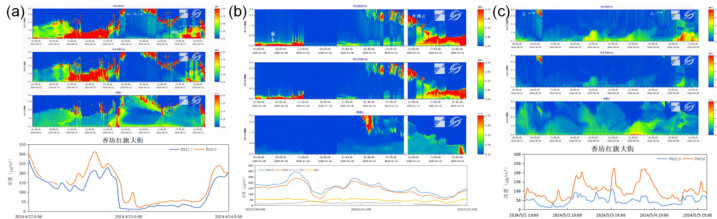
图5 不同天气现象对应空气污染物浓度变化(上图为由多光谱拉曼雷达获得的气溶胶光学特征,下图为对应时间段内污染物浓度。其中图a 为降雨对应空气污染物浓度变化;图b 为冰云对应空气污染物浓度变化;图c 为云对应空气污染物浓度变化)
3.4 多光谱拉曼雷达对雾霾光学特性对应垂直结构的分析
不同于传统雾霾检测大多局限于近地面,多光谱拉曼雷达可获得从地面至 5km 以上的污染物分布信息,其空间分辨率可达几十米,能够较为精准的获取不同天气现象对应消光系数与退偏比的垂直廓线,进而为雾霾诊断提供依据。
探测结果表明,霾对应气溶胶层厚度可达约 0.6km ;在相同高度上, 335nm 波段的消光系数通常低于 532nm 波段;两个波段的粒子退偏比与消光系数均在近地面达到最大值。在近地面,消光系数与退偏比保持相对稳定,当高度超过 200m 后,两者开始随高度增加呈现显著递减趋势(见图 6)。这表明霾污染主要集中分布于距地面 200m 以内的大气层。
同时,该结果进一步证明多光谱拉曼雷达能够依据所测得光学特性对应垂直结构相关数据分析具体天气现象,从而实现对雾霾的识别诊断。
图6 霾对应气溶胶光学特性垂直廓线
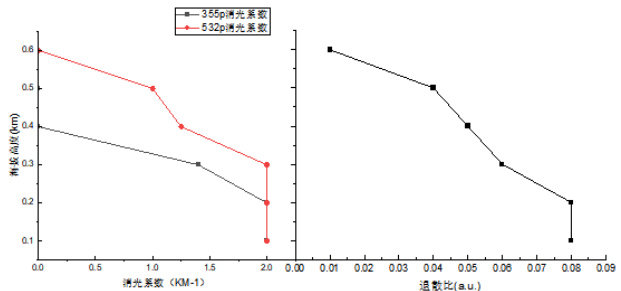
(其中左图为消光系数随高度变化曲线,右图为退偏比随高度变化曲线)
3.5 雾霾发生时空气颗粒污染物浓度与气溶胶光学特性联系分析
利用多光谱拉曼雷达,通过选取不同时间段内不同消光系数、浓度及对应空气污染物浓度样本点,并利用 Origin 进行拟合,项目组探究了空气污染物浓度大小与对应气溶胶光学特性变化之间的关系,以下为研究结果。
(1). 经拟合统计,如图 7 所示, 355nm 消光系数 α(355p) 与PM10、PM2.5 浓度均呈现显著线性关系。
与 PM10 的对应拟合公式为 C(PM(0)=219.8721α(355p)0.73574 , 式中 ɑ( 355p )为 355 p 波段对应消光系数,C(PM10)为空气污染物(PM10)浓度,其拟合度 R2=0.9289 ,回归系数 P 值分别为5.39971E-6 和 5.29873E-4, 均小于 0.05,模型显著。选取 α(355p) 为 0.15、0.6、 0.75km-1 的验证点,计算浓度与实际值的偏差分别为8.95% 、 0.67% 、 24.28% 。
与 PM2.5 的对应拟合公式则为 C(PM2.5)=164.46819α(355p)0.94039 其拟合度 R2=0.9577 ,P 值分别为 1.60506E-6 和 5.23228E-5, 均小于0.05 。验证点 ∝(355p)=0.1 、 0.55 、 0.75km-1 对应的浓度偏差分别为 45.13% 、 33.91% 、 41.64% 。
结果表明, 355nm 消光系数与污染物浓度线性关系明显,对PM10 的估算误差较小,对 PM2.5 误差较大,可能与颗粒物粒径影响有关。在 ∝(355p)=0.5-0.6km-1 时,估算结果较为准确。
图7 355 p 波段消光系数与污染物浓度关系对应拟合曲线
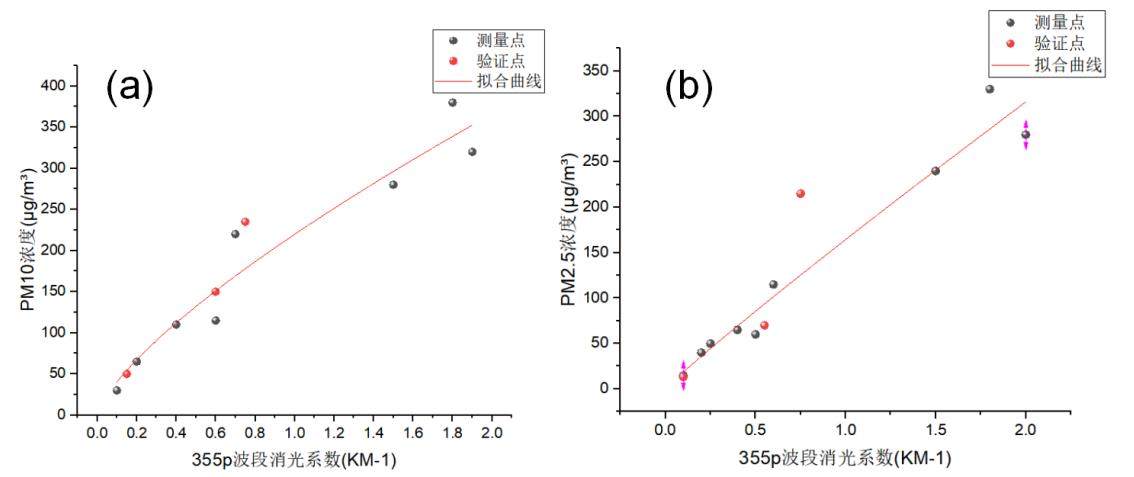
(图 a 为 355p 波段消光系数与 PM10 浓度对应拟合曲线 ; 图 b为355 p 波段消光系数与PM2.5 浓度对应拟合曲线)
(2). 如 图 8 所 示, 532nm 消 光 系 数  与 PM10、PM2.5 浓度亦呈线性相关。其中与 PM10 的对应拟合公式为C(PM10)=259.86095α(532p)0.51969 , 式中ɑ( 532p )为 532p 波段对应消光系数,C(PM10)为空气污染物(PM10)浓度,拟合度 R2=0.8583 ,P 值分别为 4.75231E-5 和 0.00516, 均小于 0.05 。验证点 ∝(532p)=0.08 、0.5、 1.5km-1 对应的浓度偏差分别为 39.87% 、81.26% 、 6.94% 。
与 PM10、PM2.5 浓度亦呈线性相关。其中与 PM10 的对应拟合公式为C(PM10)=259.86095α(532p)0.51969 , 式中ɑ( 532p )为 532p 波段对应消光系数,C(PM10)为空气污染物(PM10)浓度,拟合度 R2=0.8583 ,P 值分别为 4.75231E-5 和 0.00516, 均小于 0.05 。验证点 ∝(532p)=0.08 、0.5、 1.5km-1 对应的浓度偏差分别为 39.87% 、81.26% 、 6.94% 。
与 PM2.5 的对应拟合公式为 C(PM2.5)=199.73867α(532p)0.72448 , 拟合度 R2=0.8719 ,P 值分别为 1.62263E-4 和 0.00683, 均小于 0.05 。验证点 ∝(532p)=0.25 、0.5、 0.7km-1 的浓度偏差分别为 46.32% 、20.88% 、 2.84% 。
相比 355nm , 532nm 波段整体估算误差较大,但对 PM2.5 在较高消光系数( 0.7--1.5km-1 )下误差较小,可能与波长相关的散射特性有关。
图8 532 p 波段消光系数与污染物浓度关系对应拟合曲线
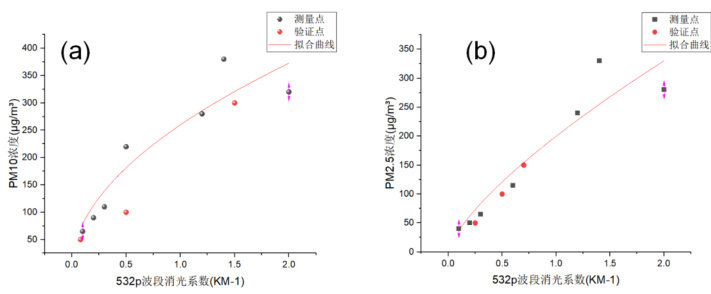
(图 a 为 532 p 波段消光系数与 PM10 浓度对应拟合曲线 ; 图 b为 532p 波段消光系数与PM2.5 浓度对应拟合曲线)
(3). 如图 9 所示,退偏比(DR)与 PM10、PM2.5 的拟合公式分别为 C(PM10)=778.72835DR0.36955 (式中 DR 为退偏比,C(PM10)为空气污染物(PM10)浓度线性关系不显著)和C(PM2.5)=592.82783DR0.32606 ,与 PM10、PM2.5 的线性关系不显著
与 PM10 的拟合度 R2=0.2590 ,P 值均大于 0.05;与 PM2.5 的拟合度 R2=0.2008 ,P 值亦大于 0.05,模型可靠性低。验证结果表明,估算浓度与实际偏差较大(最高超过 300% ),且偏差随退偏比增大而减小。退偏比与污染物浓度无显著线性关系,但与颗粒物粒径有一定关联,粒径较小时退偏比通常较低。
图9 退偏比与污染物浓度关系对应拟合曲线
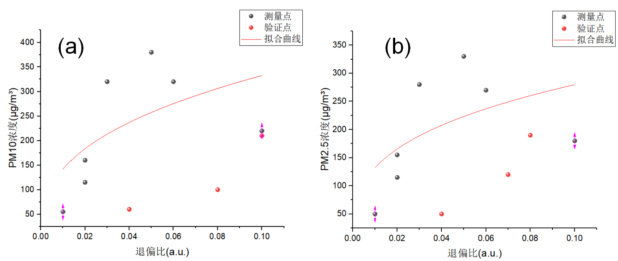
(图 a 为退偏比与 PM10 浓度对应拟合曲线 ; 图 b 为退偏比与PM2.5 浓度对应拟合曲线)
总而言之,通过上述拟合结果,可知空气中颗粒污染物浓度与消光系数之间存在较强的线性关系,且 355p 波段针对 PM10 具有较好的测量稳定性,在颗粒污染物浓度较低时测量较为准确;而 532p 波段则针对 PM2.5 有着较好的测量稳定性,在颗粒污染物浓度较高时测量精度较高。两个波段的测量优点互补,故可通过多光谱雷达测量计算得到较为精确的空气颗粒污染物浓度,测量范围较广。
3.6 对雾霾的统计学特征的分析
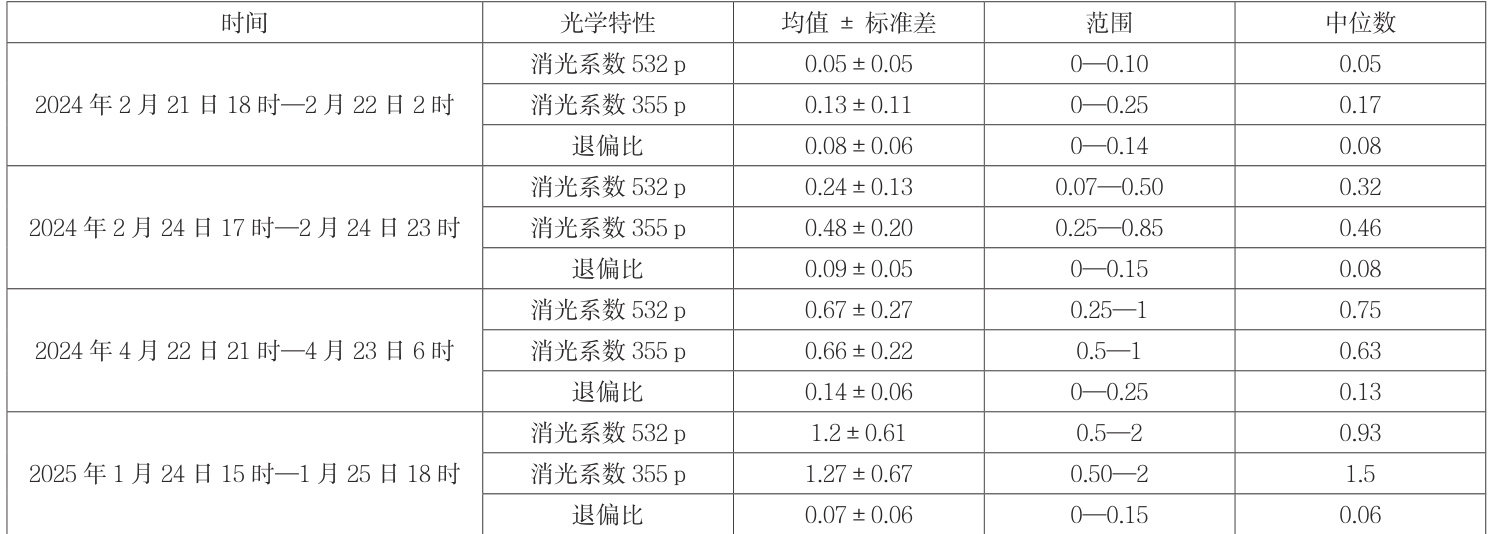
基于多光谱拉曼雷达的长期观测,可积累得到若干组雾霾光学特性的优质数据集,可通过其进一步探究对应统计学特征。故为进一步探究雾霾的普遍光学特性,项目组选取四组较有代表性的空气污染事件,将其对应光学特性(消光系数,退散比)进行一系列统计与分析,最终得到结果如表 1 所示。由该表可知,在严重的污染事件中,光学特性参数的标准差和数值范围通常显著增大,反映出重度污染天气常对应着较大的气象条件波动。与此同时,各次污染事件中消光系数与退偏比的均值与中位数较为接近,表明其数据分布基本呈对称形态。
表1 不同时期气溶胶退偏比及355/532 p 消光系数平均值 ± 标准差、范围和中位数
3.7 多光谱拉曼雷达抗干扰能力分析
多光谱拉曼雷达的信噪比高低能够反映雷达信号质量的优劣。基于多光谱拉曼雷达各通道信噪比(SNR)的评估表明,不同天气现象对信号质量的影响具有显著差异。在非特殊天气下, 355nm 与532nm 通道的有效探测高度( SNR⩾3 )通常超过 5.0km 。如发生降雨,则常导致有效探测高度急剧下降至近地面,信噪比图上表现为上空SNR 接近零(如图10(a) 所示)。降雪的影响与降雨类似(图10(b))而云层对应的图像显示的有效探测高度下降幅度通常小于降水(如图 10(c) 所示)。若出现冰云,则呈现为信噪比图上不同高度SNR 值错落分布,且有效探测高度上空的SNR 值一般大于零(如图 10(d) 所示)。
降雨降雪等天气现象虽会降低雷达的有效探测高度,但在底层仍能准确提取有关信息,这充分体现了多光谱拉曼雷达具有较强的抗干扰能力,在实际进行对雾霾的监测诊断时,应充分考虑不同天气现象对不同高度雷达测量所得数据质量的影响,并基于这一前提条件选择合适的测量数据( SNR⩾3 )进行分析统计。
图10 降雨、降雪、云、冰云对应信噪比结果伪彩图
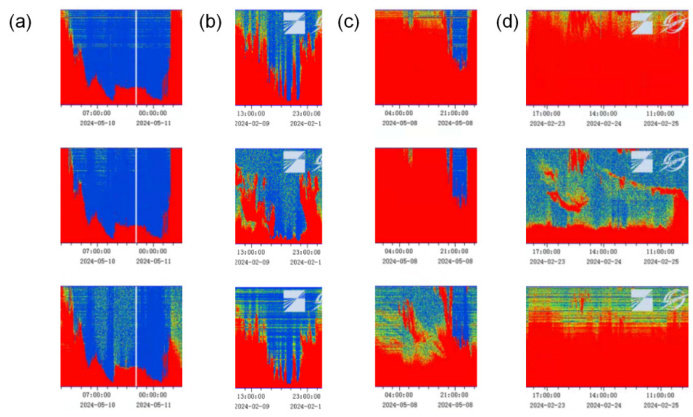
(图 a 为降雨对应信噪比结果伪彩图 ; 图 b 为降雪对应信噪比结果伪彩图;图 c 为云对应信噪比结果伪彩图 ; 图 d 为冰云对应信噪比结果伪彩图)
4 结论
本次研究中,项目组基于哈尔滨站多光谱拉曼雷达,从多方面系统分析了多光谱拉曼雷达对雾霾的具体诊断能力。由测量结果可知,雾霾的形成受逆温及相对湿度影响,以人为细颗粒物为主;近地面消光系数(355 p <532p )与退偏比最高,200 米以上显著降低;消光系数与颗粒物浓度呈强线性关系,且 355p 波段针对 PM10具有较好的测量稳定性,在低PM 值时测量较为准确;532 p 波段针对 PM2.5 有着较好的测量稳定性,且在高 PM 值时有着较好的测量精确度;重污染事件中光学参数标准差大、对应气象条件波动剧烈;此外,降雨、雪、云及冰云会显著降低 1km 以上多光谱拉曼雷达的信噪比。
通过以上结论,可知多光谱拉曼雷达具有连续观测能力强,探测精确度高、范围广,抗干扰能力强,能同时探测多个因素的优点,可以满足不同的探测需求。在实际应用中,只需将测量处理数据结果结合有关地区风速风向图,即可推知雾霾发生的可能性。未来,项目组将针对具体多光谱拉曼雷达回波与对应天气现象的具体关系进行更广泛的研究,探究雾霾预报具体模型,为东北地区雾霾天气的诊断提供依据。
参考文献:
[1]Pinnick R G ,Hoihjelle D L ,Fernandze G , et a1.Vertical structure in atmospheric fog and haze and its effects on visible and infrared extinction[J].Journal of the Atmospheric Sciences,1978,35(10):2020-2032.
[2]Hansen J C,Woolwine W R,Bates B L, et al.Semicontinuous PM2.5 and PM10 mass and composition measurements in Lindon, Utah, during winter 2007.[J].Journal of the Air & Waste Management Association (1995),2010,60(3):346-55.
[3] 雷鸣. 基于V5.2 算法的上海市气溶胶遥感图像分析研究[D].上海大学 ,2014.
[4] 许笑笑 . 基于深度学习的非均匀雾霾图像增强算法研究 [D].青岛大学 ,2024.
[5] 周航 , 丁晓敏 , 程昕 , 等 . 气象因子对城市雾霾污染扩散的影响分析[C]//中国气象学会.第36届中国气象学会年会摘要集—S2 大气环境与污染气象. 宿迁市气象局,2025:94.
[6] 龙强 . 基于激光雷达的低层大气光学特性探测研究 [D]. 南京信息工程大学 ,2012.
[7] 刘诚 , 明海 , 王沛 , 等 . 西藏那曲与北京郊区对流层气溶胶的微脉冲激光雷达测量 [J]. 光子学报 ,2006,(09):1435-1439.
[8] 韩锋 . 基于星载激光雷达数据的京津冀地区气溶胶垂直分布特征研究 [D]. 太原理工大学 ,2017.
[9] 陈思颖 , 年璇 , 陈和 , 等 . 北京城区污染过程气溶胶光学特性观测分析 [J]. 光学技术 ,2021,47(05):570-576.
[10] 狄慧鸽 . 对流层大气温度廓线的激光探测技术研究进展 [J/OL]. 暴 雨 灾 害 ,2025,44(29):1-13.https://link.cnki.net/urlid/42.1771.P.20250714.2148.004.
[11] 李博 , 裴成章 , 王楠 , 等 .2019 年西安首场雾霾 PM2.5 关键特征的综合诊断 [J]. 环境科学学报 ,2020,40(11):4048-4059.
[12]Thorsen J T ,Fu Q .CALIPSO‐inferred aerosol direct radiative effects: Bias estimates using ground‐based Raman lidars[J].Journal of Geophysical Research: Atmospher es,2015,120(23):12,209-12,220.
[13] 郑顺旋 , 梁振斌 , 马莹莹 , 等 . 苯的高阶受激拉曼散射 [J].物理 ,1979,(03):193-195.
[14] 许扬 , 李健 , 张明江 . 拉曼分布式光纤温度传感仪的研究进展 [J]. 应用科学学报 ,2021,39(05):713-732.
[15] 邓金睿 , 姜瑞景 , 钟海 , 等 . 氢气泄漏拉曼激光雷达遥测技术研究进展 [J]. 激光与光电子学进展 ,2023,60(22):51-66.
[16] 胡以华 , 夏宇浩 , 徐世龙 , 等 . 高光谱激光雷达遥感技术研究现状与发展趋势 ( 特邀 )[J]. 光学学报 ,2025,45(18):60-77.
[17] 王琴 , 马琳达 . 贵阳市空气中 PM2.5/PM10 时空分布特征研究 [J]. 环保科技 ,2015,21(01):28-31+35.
作者简介:袁旭泽,主要从事应用气象学研究。
* 通迅作者:颜明宇,主要从事应用气象学研究。

 京公网安备 11011302003690号
京公网安备 11011302003690号


