



- 收藏
- 加入书签

基于反步法的永磁同步电机自适应调速控制系统设计
 打开文本图片集
打开文本图片集

摘要:永磁同步电机在实际运行的过程中,电机系统模型参数会受自身或环境的影响而发生改变,从而导致控制精度低。为了削弱外部扰动的负面影响,让电机获得更好的跟踪性能,本文采取了基于反步法的永磁同步电机控制系统设计,并且采取simulink对该控制系统进行仿真。相较于传统PID控制系统,本控制系统有着更快的收敛速度、更强的抗干扰性,能够有效地削弱外界负载突变带来的影响,保证更好的鲁棒性。
关键词:永磁同步电机;反步法;PID;控制系统
0 引言
永磁同步电机(Permanent magnet synchronous motor, PMSM)具有结构简单、效率高、功率因数高、功率密度高、体积小、转矩电流比高、转动惯量低、易于散热及维护保养等特点,尤其在航天、数控加工中心、机器人、电动汽车[1-3]等领域获得广泛应用。为了满足各领域的控制需求,衍生出了各种控制策略,比如PID控制、直接转矩控制、滑模控制等。永磁同步电机控制系统的性能要求随着应用领域的延伸不断提高,而永磁同步电动机驱动系统具有耦合性强、变量众多且高度非线性等特点,这使其控制性能易受自身或环境变化引起的参数改变以及负载扰动的影响,而实际系统存在参数不确定性[4]又会给高精度运动控制带来巨大挑战。
针对永磁同步电机控制性能易受系统模型参数影响的问题,文献[5]提出的自适应控制大幅降低了参数变化对控制系统影响,在永磁同步电机的实际控制中具有较高的容错能力。文献[6]设计了一种基于模型参考自适应控制的速度控制器,利用参考模型提高了驱动系统的鲁棒性和动态响应速度。文献[7]提出了一种自适应SMC速度控制器,对PMSM驱动器的参数进行补偿,在参数严重变化的情况下保证了高精度转速跟踪。文献[8]使用三阶自适应来估计速度、相位和总体扰动,成功实现了感应电动机驱动系统的自适应自抗扰。文献[9]提出了一种基于自适应迭代学习控制的在线抑制方法,成功抑制了由逆变器非线性、磁链空间谐波和电流测量误差引起的转子位置估计谐波误差。文献[10]用模糊逻辑系统逼近非线性,用自适应Backstepping技术构造控制器,提出了一种速度跟踪控制方法,成功保证位置跟踪误差收敛到原点的一个小邻域。文献[11]提出了一种自适应鲁棒三步控制法,补偿了齿槽转矩和电机模型不确定性,验证了该控制器的有效性和控制性能。文献[12]采用自适应模糊控制对非线性函数进行逼近,克服参数不确定性的影响,实现了位置跟踪。文献[13]通过提出的自适应增益算法提高永磁直线同步电动机的无传感器控制精度。文献[14]针对异步电动机驱动系统的随机扰动和输入饱和问题,采用自适应反步法设计控制器,提高了系统的鲁棒性。文献[15]针对永磁同步电机混沌系统的自适应有限时间镇定问题,提出了一种自适应有限时间控制律,并采用仿真的方式验证了控制器的鲁棒性。因此,对于永磁同步电机运动控制精度易受电机模型参数改变的影响这一特点,自适应控制可以大大降低控制精度对于参数变化的敏感度。
基于以上分析,对于永磁同步电机系统模型参数改变而引起的低控制精度问题,本文将自适应控制思想应用到传统PID控制策略中。首先把系统模型参数引入误差方程中,再用反步法将系统模型参数引入实际控制函数中,实现控制器的自身补偿,使得永磁同步电机系统参数变动并存在外界干扰时,也使系统保有一定的鲁棒性和动态响应速度。
1 PMSM的数学模型
永磁同步电机是一个强耦合的非线性系统,若忽略铁芯饱和,不计涡流损耗和磁滞损耗,转子无阻尼绕组等因素,可得基于转子同步旋转坐标系d-q轴系PMSM的数学模型,推导过程如下:
3 基于Matlab 的PMSM 系统模型
3.1 仿真模型搭建
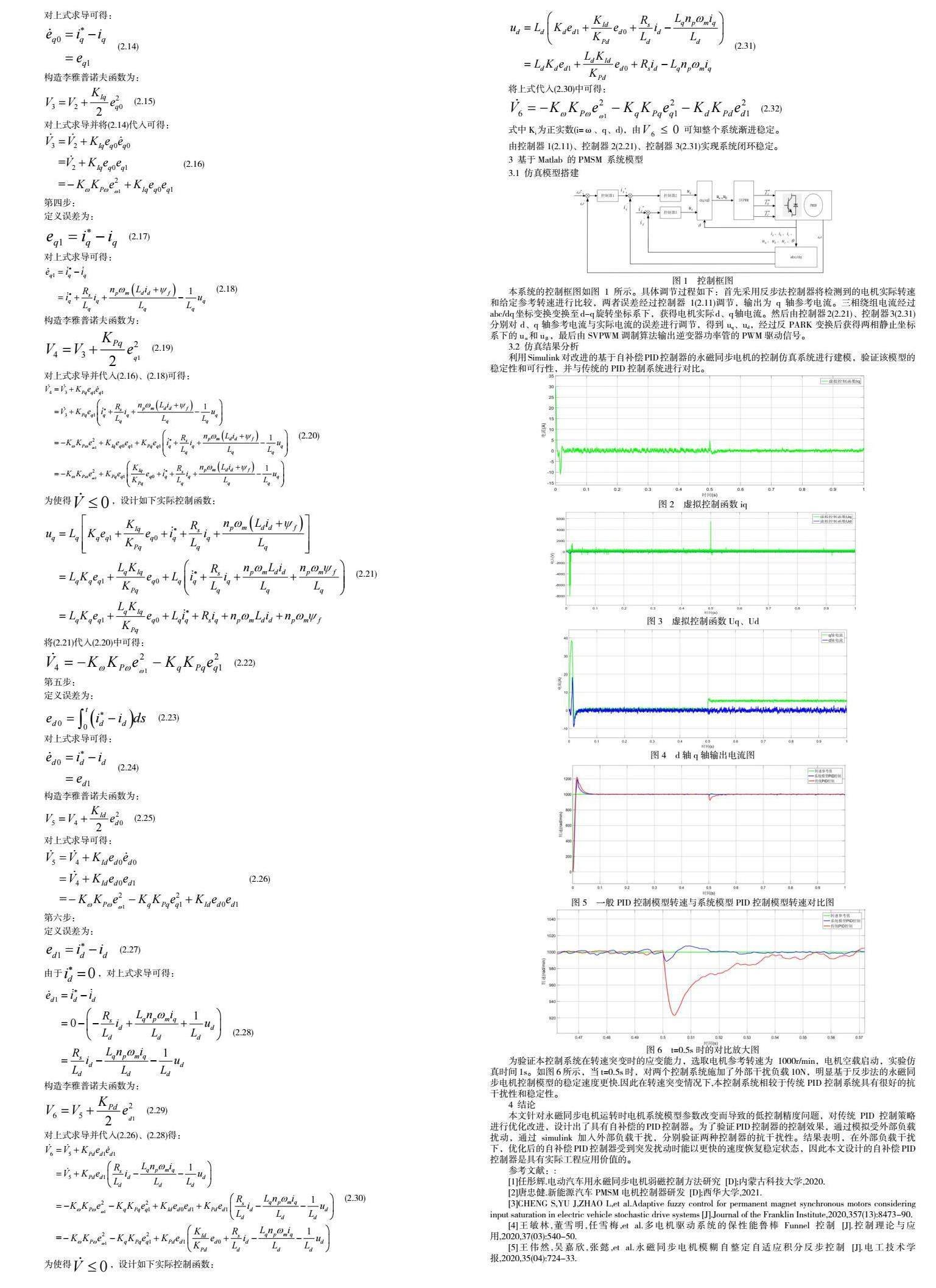
本系统的控制框图如图1所示。具体调节过程如下:首先采用反步法控制器将检测到的电机实际转速和给定参考转速进行比较,两者误差经过控制器1(2.11)调节,输出为q轴参考电流。三相绕组电流经过abc/dq坐标变换变换至d-q旋转坐标系下,获得电机实际d、q轴电流。然后由控制器2(2.21)、控制器3(2.31)分别对d、q轴参考电流与实际电流的误差进行调节,得到uq、ud,经过反PARK变换后获得两相静止坐标系下的uα和uβ,最后由SVPWM调制算法输出逆变器功率管的PWM驱动信号。
3.2 仿真结果分析
利用Simulink对改进的基于自补偿PID控制器的永磁同步电机的控制仿真系统进行建模,验证该模型的稳定性和可行性,并与传统的PID控制系统进行对比。
为验证本控制系统在转速突变时的应变能力,选取电机参考转速为1000r/min,电机空载启动,实验仿真时间1s。如图6所示,当t=0.5s时,对两个控制系统施加了外部干扰负载10N,明显基于反步法的永磁同步电机控制模型的稳定速度更快. 因此在转速突变情况下,本控制系统相较于传统PID控制系统具有很好的抗干扰性和稳定性。
4 结论
本文针对永磁同步电机运转时电机系统模型参数改变而导致的低控制精度问题,对传统PID控制策略进行优化改进,设计出了具有自补偿的PID控制器。为了验证PID控制器的控制效果,通过模拟受外部负载扰动,通过simulink加入外部负载干扰,分别验证两种控制器的抗干扰性。结果表明,在外部负载干扰下,优化后的自补偿PID控制器受到突发扰动时能以更快的速度恢复稳定状态,因此本文设计的自补偿PID控制器是具有实际工程应用价值的。
参考文献:
[1] 任彤辉. 电动汽车用永磁同步电机弱磁控制方法研究 [D]; 内蒙古科技大学, 2020.
[2] 唐忠健. 新能源汽车PMSM电机控制器研发 [D]; 西华大学, 2021.
[3] CHENG S, YU J, ZHAO L, et al. Adaptive fuzzy control for permanent magnet synchronous motors considering input saturation in electric vehicle stochastic drive systems [J]. Journal of the Franklin Institute, 2020, 357(13): 8473-90.
[4] 王敏林, 董雪明, 任雪梅, et al. 多电机驱动系统的保性能鲁棒Funnel控制 [J]. 控制理论与应用, 2020, 37(03): 540-50.
[5] 王伟然, 吴嘉欣, 张懿, et al. 永磁同步电机模糊自整定自适应积分反步控制 [J]. 电工技术学报, 2020, 35(04): 724-33.

 京公网安备 11011302003690号
京公网安备 11011302003690号


