



- 收藏
- 加入书签

基于变速率-WOA策略的水轮机调速系统PID参数优化及有功功率反调研究
 打开文本图片集
打开文本图片集
摘要:随着人们环保意识的加深,清洁能源的应用开始受到了社会各界的广泛关注,水电机组就是一种非常快速且非常稳定的清洁能源,把水电机组和风能以及光能进行有效的互补就可以得到更加优良的结构模式,借助于水电本身的调节能力更好的减小风能和光能在并网时所存在着的不稳定性。但水电机组在进行运用的过程当中一直都面临着大功率以及频繁的调节等一系列的问题,调速器的整体性能直接影响着最终机组运转的稳定性以及效率,所以针对于调速器的特性以及相关的参数优化进行研究是非常具有现实意义的。基于此,在本篇文章当中主要会选择使用变速率-WOA策略,针对于调速器PID参数进行相应的优化,希望能够更好的加强水轮机调速系统的整体性能,提高整个系统运转的稳定性。
关键词:水轮机调速系统;PID参数优化;变速率-WOA策略
引言
近些年来,我国社会经济发展的非常迅速,而不断上涨的经济同时也加强了针对于电力方面的需求,目前传统的能源面临着枯竭的问题,而且环境保护问题也变得越来越严峻,所以对于可再生能源进行开发和利用成为了研究的重点。水电本身作为一种可再生清洁能源已经成为了我国能源构成中非常重要的部分之一,而且也占据着非常重要的地位,长期以来得到了有效的开发包括应用,因此为了能够对于水电机组进行相应的改良,并且使其能够获得快速稳定的响应特性,在本文中会就水轮机调速系统进行分析,并且打造相应的数学模型,利用智能化的算法对于模型进行参数优化,希望能够有效的改善水轮机调速系统的整体性能,充分的将其自身的调节功能发挥出来。
1、水轮机调速系统的数学模型构建
数学模型通常情况下指的就是根据真实的系统进行分析,把其中针对于表达系统特性不会起到任何作用或者是所起到的作用比较微小的部分直接忽略之后所能获得的最为简化以及最为抽象的一种表达,而对于水轮机调速系统的数学模型的构建来说,我们可以根据水电站所处地理位置的相关区别以及设备存在的差异性来打造出不一样的调节系统模型,比方说线性和非线性模型。对于水电站的日常运转来说,水轮机的调速系统是非常重要的构成部分之一,其主要的任务就是在处于不同负荷条件下,让水轮机的转速能够时刻维持在一个非常合适的工作范围当中,确保能够真正的做到稳定的发电以及完成电力供应,在该系统当中非常重要的两个构成部分就是调节系统以及被控对象,调节系统选择使用的是PID调节器,可以依据信号的情况来对于水轮机的控制参数进行相应的调整,本文也会基于调节系统包括被控对象来打造出线性以及非线性模型,希望能够进一步的对于PID控制进行有效的优化【1】。
1.1线性化水轮机模型
水轮机线性化模型如下所示,在该式子当中ey指的是水轮机力矩对于导叶开度所产生的传递系数,eh指的是水轮机力矩对于水头所产生的传递系数,ex指的是水轮机力矩对于机组转速所产生的传递系数。e q y指的是水轮机流量对于导叶开度所产生的传递系数,eq h指的是水轮机流量对于水头所产生的传递系数,eqx指的是水轮机流量对于机组转速所产生的传递系数, ∆mt指的是机组力矩的增量相对于∆q为流量的增量相对值,∆y指的是导叶开度的相对偏差量,∆h指的是水头的相对偏差量,∆x指的是机组的转速相对偏差量。
1.2非线性化的水轮机模型
在对于水轮机的输出力矩包括流量变化线性模型进行研究的过程当中,其6个传递系数是完全可以从水轮机的综合模型曲线,包括目标工况点的机组状态量上面进行直接求取的,但是需要注意的一点是这种方法只适合使用在这一工况点周边运行的小波动过渡环节的研究当中,其具体的关系式如下所示。
通过针对于线性化的6个常量传递系数模型进行相应的分析,就能够将其进行直接转化,使其能够变成包含着非线性化特征的6个变量传递系数参数模型,通过使用这样的办法,既能够有效的确保水轮机的整个数学模型具备着完整性,又能够非常好的把非线性水轮机的整体动态变化展现出来。
2、水轮机调速系统的线性模型PID参数优化研究
通过对于数学模型的有效构建,为整个控制器的设计以及优化提供了非常重要的理论知识包括仿真基础,对于水轮机组的整体控制来说,调速器的整体建模包括控制策略的研究是非常重要的构成部分,其中模型参数的整体准确性也是针对于控制器进行设计时的关键性内容,其对于最终的机组动态调节会造成非常大的影响,在机组正式接入到电网当中的时候,就会直接影响整个电网的动态特性,包括安全性以及稳定性,所以针对于水轮机组的调速系统模型以及相关的参数进行研究是非常具有现实意义的。
但是因为水电行业本身存在着一定的特殊性,所以我们没有办法针对于水轮发电机的动态特性展开实机检验检测,所以可以选择使用模型仿真的方式来对于整个机组进行相应的建模,通过实验来得到一个更加可行的理论分析方法【2】。根据目前的情况来看,针对于水轮机的调速系统线性模型的整体研究其实已经非常深入了,在本文中也会以研究的最为广泛的并联微机PID调节器参数优化进行相应的研究,同时以鲸鱼优化算法为例进行探讨。相较于传统的粒子群算法来说,鲸鱼优化算法在进行应用时整体的参数设计比较少,而且寻优能力非常强,希望能够更好的加强整个水轮机组在进行运转过程当中的稳定控制,能够更好的缩短调节时间,同时使得反调超调量减小,为水电机组作为一种新能源互补的调节电源的整体稳定性提供相应的帮助。
2.1线性模型的PID参数优化研究
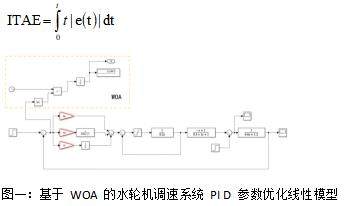
鲸鱼优化算法简称为WOA,这种优化算法在进行应用的过程当中对于数学模型进行构建,包括描述的时候是把鲸鱼的捕食行为作为研究的出发点,和粒子群算法包括遗传算法等一系列算法是非常相似的,这种算法的整体参数设置非常的少,而且寻优能力也比较强,在经过了多次迭代之后,能够对于搜索位置进行更新,最终获得一个最优解。对于鲸鱼优化算法来说,在进行位置更新的时候,其整体的行为主要包含着三种,分别是收缩包围以及游走觅食和螺旋捕食等,同时在进行迭代时该算法能够通过对于适应度函数的数值进行比对,然后对于不同个体的适应度进行有效的评估【3】。而对于本次水轮机的调速系统研究来说,在对于适应度函数进行选取的时候,就可以以积分时间绝对误差函数为研究点,这样就能够获得最优的调速器控制策略,其整体的函数表达如下所示,在该式子当中,e(t)指的是系统误差,通过算法优化之后的水轮机调速系统线性模型PID参数图如下图一所示。
为了能够更好的确定鲸鱼优化算法的效果,本文主要以鲸鱼优化算法和粒子群算法作为对比研究了不同扰动情况下的仿真工况,最终发现虽然说粒子群算法的整体收敛次数会更少一些,但是鲸鱼优化算法在完成数据优化之后,其整体的适应度值是明显要更小一些的,这也就意味着鲸鱼优化算法其实已经加强了算法跳出局部最优解的相关能力,提高了整个算法的最优值。而且在利用鲸鱼优化算法对于整个机组进行相应的优化之后,其转速参数相较于利用粒子群算法进行优化之后的情况更加能够进入一个稳定的状态当中,最为重要的一点是鲸鱼优化算法的超调量相较于粒子群算法的超调量会更加小一些,所以最终的输出会趋于稳定,最终的调节品质也会更加优良。
2.2非线性模型的PID参数优化研究
相较于线性模型来说,目前大多数的水电站选择使用的调速系统基本上都是非线性模型,非线性模型本身是一个非常复杂的电力系统,包含着水力、电力以及机械,所以针对于调节系统的调节品质来说,也会产生更加严格的要求,这也就意味着寻求最佳的控制器参数对于整个机组的稳定性,包括对于机组的相关控制来说都有着非常重要的意义【4】。
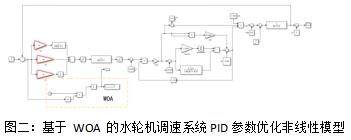
非线性模型的PID参数优化如下图二所示,在对于模型进行搭建的时候,其主要的参数包含着水利浪涌抗阻系数为1.5010,水利弹性时间为0.5155,微分环节时间常数为0:02,引水管道的摩擦系数为0.0166,增益系数为1.1364,主接力器的时间常数设定为0.3,空载流量的相对值则设定为0.12,综合惯性时间常数设定为8,初始工况设定为0.8,在对于非线性模型进行优化的时候,其主要的优化参数包含着三个,分别是比例系数、积分系数以及微分系数。同样是以鲸鱼优化算法和粒子群算法作为对比,鲸鱼优化算法的种群大小设定为10,维数为3,最大迭代次数为50,控制螺旋形状的参数设定为1,粒子群算法的种群大小为10,维数同样为3,最大迭代次数也同样为50,其惯性全值为0.9,自我学习因子则为1.1,群体学习因子也控制为1.1。
同样以不同扰动情况来完成仿真工况的研究,工况设定分别划定为20%的增负荷扰动以及20%的减负荷扰动,包括5%的频率扰动和风能以及太阳能所产生的波动所造成的影响等,通过对于不同情况进行分析可以发现,鲸鱼优化算法在进行优化之后的适应度值是要小于粒子群算法的,并且鲸鱼优化算法本身的收敛次数会更加少一些,通过使用这样的算法,不仅能够更好的缩短收敛时间,同时也可以加强算法能够跳出局部最优解所产生的能力,这两种算法都是在机组转速于11秒的时候进入到稳定的状态当中,但是经过对比则可以看出,相较于粒子群算法来说,基于鲸鱼优化算法在对于PID参数进行优化的时候,整个机组转速的超调量明显变得更小,这也就意味着机组的输出非常的稳定,而且整体的调节品质也更加优良【5】。
当然除了鲸鱼优化算法包括粒子群算法能够得到比较精准的结果以外,也可以根据每一个水轮机组的运行工况来选择其他的优化算法,比方说常见的遗传算法、差分进化算法以及蚁群算法等,通过科学且有效的对比,最终就能够找到更加符合于每一个不同的水轮机组运行情况的PID参数优化算法。而且在展开实际应用时,在对于整个调速系统进行参数优化的过程当中,不能够只以单一目标作为研究的重点,而是必须要考虑多个优化目标,所以可以把多目标的优化算法引入到整个调速系统的PID参数优化当中,这样就能够有效的实现多个性能指标的综合优化研究,这是因为机组本身的结构和关联就非常的复杂,再加上展开实际运行的时候,有一些假设性的理想条件可能会被破坏,很难真正的用更加精准的数字模型来对其进行描述。所以完全可以从多个角度出发,例如在电力系统当中使用的比较常见的Prony方法,这一方法在进行应用的过程当中,能够同时对于电力系统振荡信号的频率以及衰减因子,包括幅值和相位信息等进行有效提取,通过对于多个目标信息的有效分析,最后将其使用在励磁的控制设计当中就能够对其性能进行有效的改善。
除此之外,为了能够更好的实现对于水轮机调速系统的实时优化控制,也可以选择将模型预测控制和优化算法进行有效的融合,依据模型预测控制来对于每一个采样时刻求解,以此来获得最优的控制输入,例如可以打造一个导叶柔性控制模型,这样就能够有效的减小水锤效应所导致的水轮机力矩和发电机有功功率容易出现的反调现象。
结束语:
综上所述,为了能够更好的加强整体的清洁能源在进行应用时的架构稳定性,在本篇文章当中针对于水轮机的调速系统PID函数参数优化进行了相应的研究,以线性模型和非线性模型为例,分别探讨了模型的优化,搭配了鲸鱼优化算法作为整体的控制策略,利用仿真工况针对于最终的优化配置进行了分析,最终发现将鲸鱼优化算法使用在水轮机调速系统的优化中是非常具有现实意义的,有效地加强了整个机组调节的性能,使其整体运转变得更加稳定。
参考文献:
[1] 易建波,张国洲,张鹏,等. 超低频振荡阻尼控制中的水轮机调速系统参数双层优化策略[J]. 电工技术学报,2022,37(5):1219-1228. DOI:10.19595/j.cnki.1000-6753.tces.210104.
[2] 古志,曾云,李敏,等. 基于SOA的水轮机调速系统PID参数优化[J]. 排灌机械工程学报,2021,39(6):583-588. DOI:10.3969/j.issn.1674-8530.20.0022.
[3] 周克良,张自建,邓飞翔. 基于LIPO算法的水轮机调速系统PID参数优化设计[J]. 传感器与微系统,2022,41(5):95-98. DOI:10.13873/J.1000-9787(2022)05-0095-04.
[4] 马国华. 基于MATLAB和PSD-BPA的水轮机及调速系统参数辨识研究[J]. 大电机技术,2022(2):87-92. DOI:10.3969/j.issn.1000-3983.2022.02.015.
[5] 师彪,李郁侠,何常胜,等. 水轮机智能调速系统数学模型仿真及参数辨识[J]. 电力自动化设备,2010,30(4):10-15. DOI:10.3969/j.issn.1006-6047.2010.04.003.

 京公网安备 11011302003690号
京公网安备 11011302003690号


