



- 收藏
- 加入书签

基于扩展卡尔曼与自适应容积卡尔曼滤波的车辆状态估计
 打开文本图片集
打开文本图片集

摘 要:【目的】本文旨在验证基于扩展卡尔曼(EKF)与自适应容积卡尔曼(NACKF)滤波的车辆状态估计的准确性。【方法】运用Simulink和Carsim联合建立分布式驱动电动汽车状态估计器模型,同时把两种滤波器得到的估计结果与 Carsim输出的参考结果进行对比【结果】在双移线转向工况和蛇形转向工况下,NACKF和EKF都能估计出质心侧偏角与横摆角速度曲线,且NACKF比EKF的估计结果更优。【结论】基于NACKF估计的质心侧偏角和横摆角速度的平均误差比EKF更小、精度比更高,可用于汽车横摆稳定性控制研究。
关键词:扩展卡尔曼;自适用卡尔曼;状态估计;质心偏移角;横摆角速度
引言
随着社会的快节奏发展,大量汽车涌入街道,带动了汽车行业的崛起。因车辆在高速行驶过程中发生失稳现象而导致的交通安全事故时常出现,为了主动避免安全事故的发生,国内外学者对拥有主动安全性控制优势的电动汽车展开研究,其中车辆横摆稳定性是影响主动安全性的关键因素,但电动汽车的横摆稳定性控制受到车辆某些重要状态参数的影响,受车辆成本要求和传感器可靠性及稳定性的限制,一些重要的行驶状态参数不容易直接获得[1],,例如横摆角速度和质心侧偏角,因此运用低成本传感器获得一些常见的状态参数,再运用动力学关系推导和滤波算法得到车辆的关键状态参数显得十分重要。本文考虑到车辆在实际行驶过程中,量测噪音是随着环境变化而变化的,因此提出了改进的次优无偏极大后验噪音估计器与容积卡尔曼滤波结合形成噪音自适应容积卡尔曼滤波对车辆参数进行在线估计,在双移线和蛇形两种工况下,仿真结果都显示本文提出的噪音自适应容积卡尔曼滤波器具有较好的估计效果。
1基于扩展卡尔曼滤波算法的车辆状态估计
1.1扩展卡尔曼滤波理论介绍
1960年,卡尔曼提出了一种即可用于一维线性系统,也就是经典的卡尔曼滤波算法(KF)[2]。卡尔曼滤波只能进行下一时刻的估计,如果出现误差就引入增益对状态量进行修正[3]。卡尔曼滤波虽然应用比较广泛,但它只在线性系统中有很好的估计效果,当估计复杂的非线性系统状态量时,会随着迭代次数的增加,估计出的误差就会越来越大,最终会导致估计结果出现发散现象。车辆动力学状态估计系统就是非线性的,所以卡尔曼滤波就不太适用,针对卡尔曼滤波的局限性,有学者提出了KF的升级版扩展卡尔曼滤波(EKF),EKF可以将非线性问题进行一阶偏导忽略掉高阶项,向 KF转化[4],然后再通过KF对系统进行估计,对于非线性系统具有较好的估计效果。因此EKF是非线性系统里面被使用最广泛的状态参数估计算法。
1.2基于扩展卡尔曼滤波的车辆状态估计算法实现
考虑到算法的有效性,本文的状态估计系统采用基于横向、纵向以及横摆三个方向自由度的车辆模型。该估计器以车辆的纵向加速度和方向盘转角为输入量、以横向加速度作为观测变量,估计器的状态量是车辆的横摆角速度、纵向速度以及质心侧偏角,它们的表达式如下所示:
式中为方向盘转角
2基于自适应容积卡尔曼滤波算法的车辆状态估计
2.1 容积卡尔曼滤波理论介绍
虽然EKF是非线性系统中被使用最广泛的状态估计算法,但面对强非线性的系统时,EKF也可能出现滤波结果较差或者发散的情况。针对上述问题,有学者提出了容积卡尔曼滤波算法(CKF),它利用球面-径向容积法则分别对球面和径向面进行积分,从而获得更高的准确度。通过学习相关文献[5]可以得到多维积分形式:
式中,Rn为积分区域,f(x)为任意函数,为了求解上式的多维积分问题, 有学者运用 Spherical-Radial 准则变换把上式转化成了球面径向积分问题,再用Cubature准则进行近似,从而出现了容积卡尔曼滤波。
2.2 基于自适应容积卡尔曼滤波的车辆状态估计算法实现
车辆在实际道路上行驶时,噪音是随着外界环境的不同而动态变化的,如果把噪音设置为一个定值可能导致估计精度下降甚至出现发散的情况,本文提出了改进的次优无偏极大后验噪音估计器与容积卡尔曼滤波结合形成噪音自适应容积卡尔曼滤波(NACKF)对车辆关键状态参数进行在线估计,改进的噪音估计 器可以根据外界环境变化情况,实时调节噪音协方差矩阵。
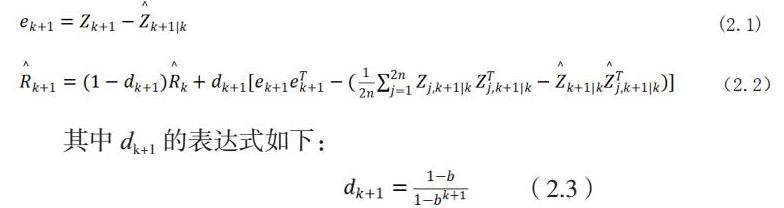
在已知一个量的基础上再对另一个量进行研究,车辆在道路上行驶时,外界环境的改变具有不确定,量测噪音正好反映了这一特征,对于随外界环境动态改变的量测噪音协方差矩阵,应该显示出新参数的重要 性,减小历史参数的影响,所以权重系数是一个不断改变的量,本文通过引用遗传因子来解决这个问题,改进的次优无偏极大后验噪音估计器如下所示:
其中dk+1的表达式如下:
表达式中b为遗传因子,0<b<1,通常的取值范围为0.95到0.99之间。随着循环的进行,每次都改变量测噪音协方差矩阵Rk+1,形成噪音自适应容积卡尔曼滤波估计器。
3两种滤波算法仿真结果与分析
为了证明本文提出的自适应容积卡尔曼滤波估计器能够准确估计出车辆关键状态参数,本文在双移线和蛇形两种工况下,运用Simulink和Carsim联合建立了分布式驱动电动汽车状态估计器模型,并把估计的质心侧偏角与横摆角速度及EKF估计的结果与 Carsim输出的参考结果进行对比。
3.1 双移线转向工况
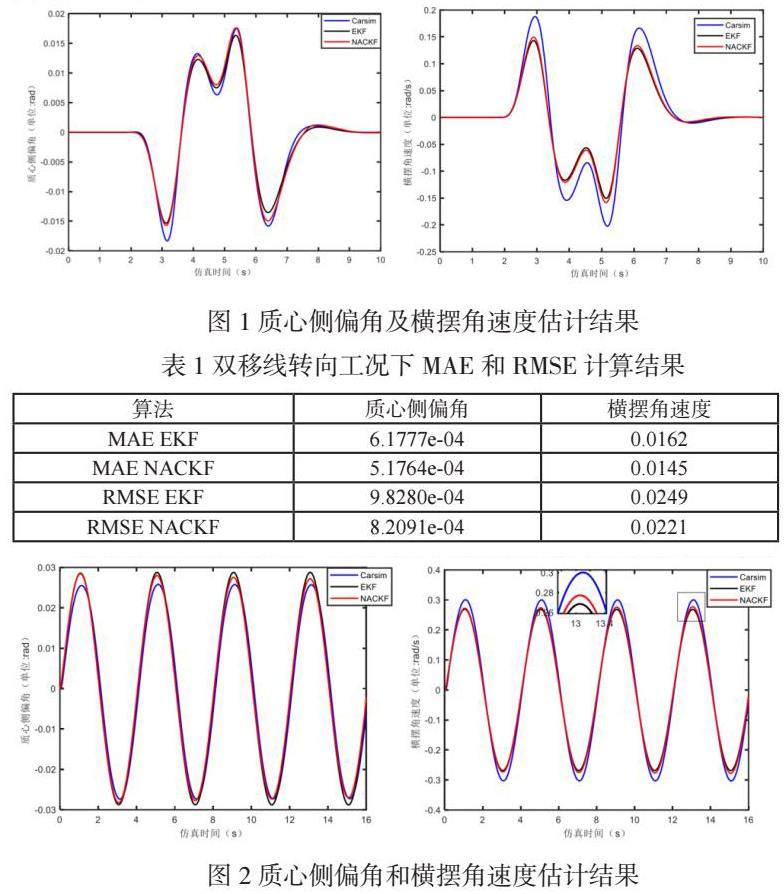
在Carsim中建立了双移线工况,该工况下电动汽车的速度为85km/h,路面附着系数为0.8,采样时间为0.001s,方向盘转角输入转角在-50°和50°之间进行波动,通过扩展卡尔曼滤波和自适应容积卡尔曼滤波得到的电动汽车质心侧偏角估计曲线和横摆角速度估计曲线如图1所示:
采用平均绝对误差MAE和均方根误差RMSE进行比较判别,得到的结果如表1所示:
在双移线转向工况下,EKF代表的曲线是扩展卡尔曼滤波估计出的结果,NACKF代表的曲线是自适应容积卡尔曼滤波估计出的结果,Carsim代表的曲线作为参考值,从图1可以看出,NACKF和EKF都能估计出质心侧偏角值和横摆角速度值,而且明显可以看出NACKF的估计精度更高,NACKF的值比EKF更加靠近参考值。
3.2 蛇形转向工况
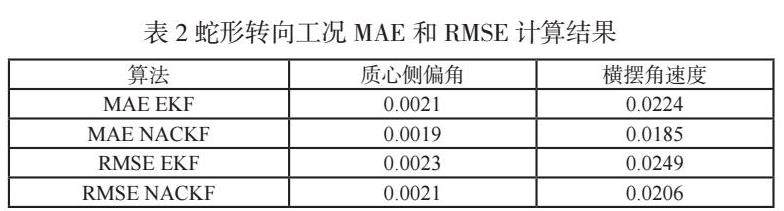
在蛇形转向工况下,车辆的速度设置为40km/h,采样时间为0.001s,路面附着系数设置为0.8,方向盘转角输入转角在-100°和100°之间进行波动,通过扩展卡尔曼滤波和自适应容积卡尔曼滤波得到的电动汽车质心侧偏角估计曲线和横摆角速度的估计曲线如图2所示:
在蛇形转向工况下,采用平均绝对误差MAE和均方根误差RMSE进行比较判别,得到的结果如表2所示:
在蛇形转向工况下,由图2可以看出,NACKF和EKF都能对车辆的质心侧偏角和横摆角速度进行在线估算,且NACKF的估计曲线随着时间的推移越来越靠近参考曲线。综合上述两种工况可以得出,NACKF和EKF都能估计出质心侧偏角与横摆角速度曲线,而且NACKF比EKF的估计结果更优。
4结论
本文介绍了扩展卡尔曼滤波和容积卡尔曼的相关理论知识,分析了两者的优缺点,提出了改进的次优无偏极大后验噪音估计器与CKF结合形成NACKF估计器,该估计器可以随着估计过程的进行,对算法中噪音协方差矩阵进行动态自适应调整。在三自由度车辆动力学模型基础上,运用两种算法对分布式电动汽车进行了关键状态参数估计,选取双移线和蛇形两种工况进行试验,用平均绝对误差和均方根误差两种方式进行评估得出,在双移线工况和在蛇形工况下,NACKF估计的质心侧偏角和横摆角速度的平均误差比EKF更小,结果表明NACKF的估计精度比EKF更高。
参考文献
[1]De Novellis L, Sorniotti A, Gruber P. Wheel torque distribution criteria for electric vehicles with torque-vectoring differentials. IEEE Transactions on Vehicular Technology, 2013,63(4): 1593-1602.
[2]Kalman R E. A new approach to linear filtering and prediction problems. 1960.
[3]张家旭, 李静. 采用自适应无迹卡尔曼滤波器的车速和路面附着系数估计. 西安交通大学学报, 2016,50(3): 68-75.
[4]Zong C, Pan Z, Hu D, et al. Information fusion algorithm for vehicle state estimation based on extended Kalman filtering. Jixie Gongcheng Xuebao/Journal of Mechanical Engineering, 2009,45(10): 272-277.
[5]STROUD A.H. Gaussian quadrature formulas.NJ: Prentice Hall,1966.
作者简介:胡朝辉(1981.12),男,汉,博士,湖南大学机械与运载工程学院,副研究员,主要研究方向:汽车轻量化技术、数字孪生
作者简介:杨光德(1981.06),男,汉,硕士,广西柳州联耕科技有限公司,总工,主要研究方向:汽车整车集成、底盘结构及性能设计
作者简介:甘强(1974.10),男,汉,硕士,广西玉柴新能源汽车有限公司,技术部长,主要研究方向:汽车整车集成、电气控制
基金项目:广西创新驱动 桂科(AA21077019)新一代智能物流车架构共用型电子电气控制关键技术开发与应用; 广东省重点领域研发计划项目(2022B0909070001)新能源汽车铝合金超大型结构件制造成型技术

 京公网安备 11011302003690号
京公网安备 11011302003690号


