



- 收藏
- 加入书签

汽车线控制动技术研究
 打开文本图片集
打开文本图片集
[摘要]现代汽车制动控制技术止朝着线控制动控制成品方向发展,线控制动系统将取代以液压或气压为主的传统制动控制系统。介绍了汽车线控制动技术的研究现比较,并对电子机械式制动系统的关键部件及其性能特点进行了分析,论述了线控制动系统的关键技术及发展。
关键词:汽车电子液压制动电子机械制动
前言
随着电子技术,特别是大规模集成电路的发展,汽车制动系统的形式也将发生变化。线控制动与传统的制动相比。在制动效能、安全性、可靠性方面有较大的突破,可以提高制动压力,使制动系统的布置更加灵活,与制动辅助系统的结合性更好,将逐步取代传统的制动方式,使实现汽车的全电成为可能,汽车制动系统直接影响汽车的行驶安全性能。随着高速公路的发展、车速的提高及车流密度的日益增大,为保证行车安全,汽车制动系统的控制变得更加重要,随着电子科技和网络技术的发展,出现了更加高效、节能的线控技术(x—by—wire)。结合线控技术和汽车制动系统而形成的线控制动(BBW)系统,将传统液压或气压制动执行元件改为了电驱动元件,具有可控性好、响应速度快的特点,具有良好的发展前景。
1.传统制动系统
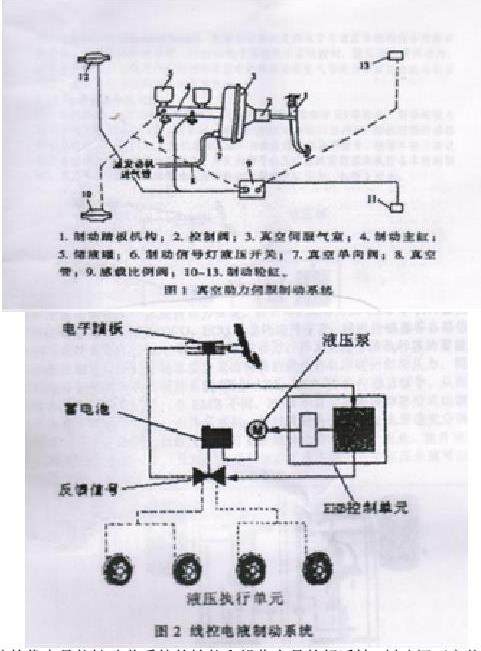
传统制动系包括液压系统(产生制动能量)、控制系统(产生制动动作、控制制动效果,如制动踏板机构等)、传动装置(将制动力传递到制动器的各个部件,如制动主缸、轮缸和液压管路)和制动器(完成制动作用的部件,如制动盘、制动毂、制动蹄等),现代汽车上的制动系还包括助力系统、制动力调节装置(各种阀体)和报警装置等。如图1所示装有真空助力的制动系统。能够达到有效的制动力,可以减轻驾驶员的踏板力,使制动变得轻松。同时由于道路条件不同。汽车载荷不同,实施制动的作用力也不同,因此在多数情况下很难获得最合适的制动效应,特别是在紧急制动时,很容易产生侧滑现象,现在广泛使用制动防抱死系统(ABS),使安全性进一步提高。
2、线控制动系统BBW
传统车辆制动系统的气体等或液体传输管路长。阀类元件多。对于长轴距或多轴车辆及远距离控制车辆,由于管线长及速度慢,易产生制动滞后现象,制动距离增加,安全性降低,而且制动系统的成本也较高。与传统的制动系统不同,线控制动以电子元件代替部分机械元件,成为机电一体化的制动系统。在电子控制系统中设计相应程序,操纵电控元件来控制制动力的大小及制动力的分配,可完全实现使用传统控制元件所能达到的ABS及ASR等功能。线控制动系统目前分为两种类型,一种为电液制动系统EHB(Electro—hydraulicBrake),另一种为电子机械制动系统EMB(Electro—MechanicalBrake)。电液制动系统是将电子与液压系统相结合所形成多用途、多形式的制系统。EHB由电了系统提供柔性控制,液压系统提供动力。而电子机械制动系统则将传统制动系统中的液压油或空气等传力介质完全由电制动取代,是未来制动控制系统的发展方向。
3、电液制动系统EHB
由传感器、ECU(电子控制单元)及执行器(液压控制单元)等构成。制动踏板与制动器间无直接动力传递。制动力时,制动力由ECU和执行器控制,踏板行程传感器将信息传给ECU,ECU汇聚轮速传感器、转向传感器等各路信号,根据车辆行驶状态计算出每个车轮的最大制动力,并发出指令给执行器的蓄能器来执行各车轮的制动。高压蓄能器能快速而精确地提供轮缸所需的制动压力。如图2所示。
电液制动系统的优点是能够改善系统的性能和操作人员的舒适性。制动阀可安装在远离驾驶室更接近于制动器的位置,以减少管路的消耗。无需采用更多的液压阀及管路就能使远程操作更容易。将电液技术引入全动系统,需要安装带有踏板角度传感器的电子踏板、电控单元、阀驱动器及电液制动阀以取代原来的连接和压力制动阀。保留原系统中的带有安全阀的泵、蓄能器充液阀、蓄能器及制动。电子踏板可以提供与踏板转角成比例的反馈力。踏板解度传感器将踏板角度转换为电信号,输入电子控制单元。可编程控制单元将控制电流输入到比例电磁阀的电磁线圈。阀芯移动到所输出的制动压力与电磁线圈力按比例保持平衡的位置。尽管看起来从踏板转换到制动压力更复杂,但可编程的控制单元使系统设计者能够实现机械系统无法达到的更柔性的传递功能。当用于比例系统时,该阀能够为线控制动系统、防抱制动系统及牵引控制系统提供无动力常规制动和紧急制动所需要的液压动力。博世公司SBC制动系统,线控SBC采用电子控制功能取代了传统制动系统中制动踏板与轮边制动器之间的机械及液压连接,即由电气控制替代了原先的杆系及液压管路连接,SBC系统在正常的制动过程中,首先由踏板行程模拟器中集成的行程传感器及压力传感器感应驾驶者施加在踏板上制动力的速度及强度。以识别驾驶者的制动意图:然后SBC计算机根据系统电气线路传输来的感应信号计算出各车轮所需的制动力;接着,液压执行单元根据SBC计算机输出的控制指令通过高压蓄能器分别向各车轮精确施加所需的制动力,使得车辆更快速、更稳定地制动或减速。
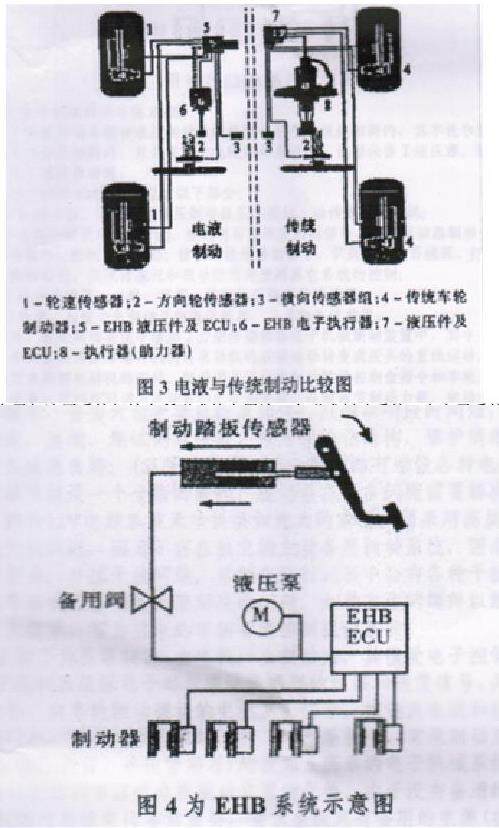
在中小型车辆的传统制动系统中,驾驶员通过制动主缸在轮缸建立制动压力,而电液制动系统则是通过蓄能器提供制动压力,蓄能器压力由柱塞泵产生,可提供多次连续制动的压力。图3为小型车辆电液制动系统与传统制动系统的比较,电液制动的控制系统由传感器、ECU(电子控制单元)及执行器(液压控制单元)等构成。制动踏板与制动器间无直接动力传递。制动时,制动力由ECU和执行器控制,踏板行程传感器将信息传给ECU,ECU汇聚轮速传感器、转向传感器等各路信号,根据车辆行驶状态计算出每个车轮的最大制动力,并发出指令给执行器的蓄能器来执行各车轮的制动。高压蓄能器能快速而精确的提供轮缸所需的制动压力。同时,控制系统也可接受其他电子辅助系统(例如ABS、ESP等)的传感器信号,从而保证最佳的减速度和行驶稳定性。与EMB不同,EHB不需要车轮制动器附近的额外空问,也不会增加额外的重量,为降低能耗,经过良好设计的14v电源能充分满足要求。在紧急情况下,制动主缸的压力还可直接施加给两个前轮。因此,就目前而EHB是实现BBW的第一步。且对于重型车辆或工业车辆,只有液压系统可以产生较大的制动力矩,以满足大吨位车辆的制动要求。
EHB系统是电子与液压系统相结合所形成的多用途、多形式制动系统,由电子系统提供柔性控制,液压系统作为备用系统提供动力,以确保当系统工程电子部分出现故障时还能保证系统的制动能力。EHB系统可以看作是EMB系统的一个先期产品,不会得到长期应用,因为它不具备完全电子制动的优点,图4为EHB系统示意图。在EHB系统中,制动踏板和制动器之间的液压连接是断开的,带有踏板感觉模拟器和电子传感器的电子踏板模块代替了传统的制动踏板,驾驶员的意图通过“线”传递到液压单元——整合的电子控制单元(ECU),而车辆制动与传统的制动一样,EHB系统的电子控制单元接收与制动踏板连接的传感器信号,正常工作情况下备用阀关闭,控制器通过由液压泵驱动的电机进行制动。当控制器处于故障模式时,备用阀打开,常规液压制动系统起作用,进行制动。
4、电子机械制动系统EMB
电子机械制动系统和液压制动系统就制动原理来说是相同的,其车轮和制动装置的主要部分是相同的,只是在电子机械制动系统中,电源代替了液压源,机电作动器代替了液压作动筒。
小型车辆的EMB主要包含以下部分:
(1)电制动器。其结构和液压制动器基本类似,动作器是电动机;
(2)电制动控制单元(ECU)。接收制动踏板发出的信号,控制制动器制动:接收驻车制动信号,控制驻车制动;接收车轮传感器信号,识别车轮是否抱死、打滑等;控制车轮制动力,实现防抱死和驱动防滑并兼顾其它系统的控制;
(3)轮速传感器。准确、可靠、及时地获得车轮的速度;
(4)电源。为整个电制动系统提供能源,与其它系统共用。
此外,在电制动系统中增加了力矩传感器在电子机械制动装置中,其中一种是通过一个大直径的滚珠螺杆机构将电动机的旋转运动转变成压头的直线运动。制动调节器用来控制电动机的运转。制动调节器接收制动防滑控制盒指令和车轮力矩传感器的信号,可以自动调节电动机的电流和电压,从而调节制动力矩。电动制动装置中除了采用电动机外,还可以使用电磁离合器,使制动盘压紧或松开。新型电磁制动器由电磁体1、制动蹄2、销轴3、制动械杆4、回位弹簧等组成,其工作原理为:电磁体可视为一E型电磁铁,采用车载电瓶供电,制动鼓相当于街铁,这样经过气隙形成闭合回路。当需要制动时,接通电磁体上电源,电磁体产生吸力,被吸到制动鼓上并被其带动旋转,从而带动制动杠杆从动端将制动蹄顶开,直至制动蹄上的摩擦片与制动鼓的内圆柱面接触产生磨擦,并被制动鼓带动转动,此时制动杠杆继续被电磁体带动转动,制动鼓在与电磁体、制动蹄的摩擦力的作用下不断减速,直到停止转动。制动完成后,断开电磁体的电源,电磁体失去磁力而脱离制动鼓端面,回位弹簧将制动蹄拉回原位,摩擦片与制动鼓脱离,制动消除。
从结构上就可以看出电子制动系统具有其它传统制动控制系统无法比拟的优点:1)系统结构简单,省去大量管路系统及部件;2)制动响应时间短,提高了制动性能;3)系统制造、装配、测试简单快捷,采用模块化结构,维护简单;4)采用电线连接,系统耐久性能良好;5)易于改进,略加变化即可增设各种电控制功能。
电子机械制动系统是一个全新的系统,但仍存在很多问题解决:1)驱动能源问题,目前车辆的12V电源系统无法提供如此大的能量,需采用高质量的42V电源;2)控制系统失效问题。因为不存在独立的主动备用制动系统,因此需要一个备用系统保证制动安全;3)抗干扰问题。车轮在运行过程中会有各种干扰信号,如何消除这些干扰信号造成的影响是急需解决的问题。如果上述问题得以解决会给车辆制动系统带来巨大变革,可为将来的车辆智能控制提供条件。
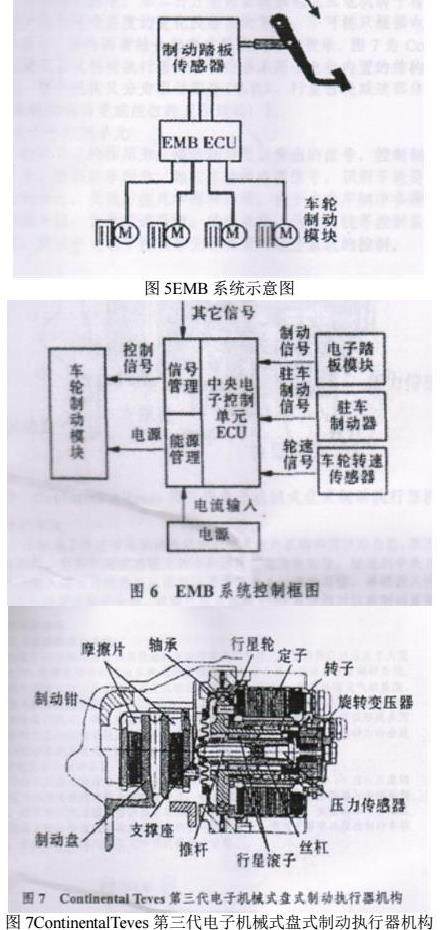
EMB系统去除了油压系统,由电机产生制动力,其值受电子控制器的控制。EMB系统的电子控制器根据电子踏板模块传感器的位移和速度信号,并且结合车速等其它传感器信号,向车轮制动模块的电机发出信号,控制其电流和转子转角,进而产生所需的制动力,达到制动的目的。在EMB系统中,常规制动系统中的液压系统(主缸、真空增压装置、液压管路等)均被图5所示的电子机械系统所代替。由于没有备用的机械或液压系统,EMB系统的可靠性变得非常重要,要求系统具有备用的电源(在主电源失效时工作)和冗余的通讯链路(连接制动踏板的三重冗余链路)。
EMB系统原液压系统和EHB系统相比,它的控制器采用了高可靠度的总线协议,控制系统采用冗余计时。为减小空间,电子元件可以安装在EMB调节器内。
5、EMB系统关键部件和性能特点
5.1EMB系统的关键部件
汽车EMB系统主要由车轮制动模块、中央电子控制单元和电子踏板模块等组成,其控制框图如图6所示。
5.1.1车轮制动模块
车轮制动模块由制动执行器、制动执行器ECU等组成。其中,制动执行器有两种设计方案:一是集成了力或力矩传感器;二是无集成力和力矩传感器。第一种方案可省去对制动力或制动力矩的计算,使系统变得更准确、可靠。但力或力矩传感器价格昂贵,而且集成困难。第二种方案需要根据电流或电机转子转角来估算制动夹紧力,但由于外界环境温度的变化及磨损影响,不可能只根据电流或电机转子转角来计算夹紧力,需将两者结合起来才能收到好的效果。图7为ContinentalTeves第三代电子机械式盘式制动执行器。该执行器采用了电机内置的结构,它的最大特点就是模块化,整个机构又分为驱动部分(电机)、行星齿轮减速部分及行星滚子螺旋传动部分(把旋转运动变成丝杠的直线运动)。
5.1.2中央电子控制单元
中央电子控制单元的作用为:接收制动踏板发出的信号,控制制动器制动;接收驻车制动信号,控制驻车制动;接收车轮传感器信号,识别车轮是否抱死、打滑等;控制车轮制动力,实现防抱死和驱动防滑。由于未来车辆中各种控制系统,如卫星定位、导航系统、自动变速系统、转向系统、悬架系统等控制系统与制动控制系统高度集成,所以中央电子控制单元还要兼顾这些系统的控制。
5.1.3电子踏板模块
EMB系统取消了传统液压制动系统中机械式传力机构和真空助力器,取而代之的是踏板模拟器。它将作用在踏板上的力和速度转化为电信号,输送到中央ECU。踏板模拟器的输入输出特性曲线应很好地符合驾驶员的驾驶习惯,并根据人体工作学设计,以提高舒适性和安全性。目前已经应用的EHB系统相对以前制动系统的最大改进就是采用了踏板模拟器,有效地提高了制动响应速度。
5.2EMB的性能特点
与传统的液压制动系统相比,EMB系统有如下优点:
5.2.1由于制动执行器和制动踏板之间无液压和机械连接,大大减少了制动器的作用时间,进而有效地缩短了制动距离。
5.2.2安装更简单、快速、无需制动液,有利于环保,也有助于提高系统的再利用性,同时也减轻了系统的质量。
5.2.3无常规制动系统的真空增压器,减少了所需的空间,机罩下的布局更加灵活。
5.2.4制动踏板可调,舒适性和安全性更好。
5.2.5在ABS模式下踏板无回弹振动,几乎无噪声。
5.2.6可实现所有制动和稳定功能,如ABS、EBD、TCS、ESP、BA、ACC等。
6、轮式工业车辆制动系统
全液压动力制动系统以其优越的制动性能及可靠性已被国内外广泛应用于大型车辆之中,目前从国外引进的多种:业车辆中,其制动全部采用动力液压制动系统。气压或气顶液式制动系统与全液压式相比,制动滞后时间长、需另外增设气动系统、结构庞大易造成排气亏染等几大缺点,尤其是制动滞后,使自重圈套的工业车辆行驶安全性难以保证,而电液制动系统,则将电子与液压系统相结合,可以形成多用途、多种形式的制动系统。由电子系统提供柔性控制,比液压系统提供动力的全液压动力制动系统具有更多的优点。
6.1全液压动力制动系统
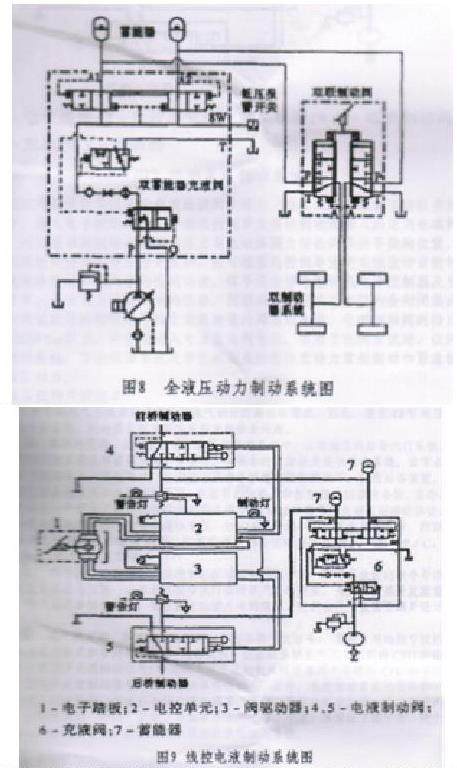
典型双回路全液压动力制动系统如图8所示,其基本工作原理如下:由液压泵输出的压力油经充液阀向两个蓄能器充液,溢流阀对系统起限压保护作用。当需要制动时,踩下制动阀踏板,蓄能器中的高压油进入前后桥制动器,实现制动。全液压动力制动系统尽管较气顶液式制动系统具有很多优势,但对于需要远程控制的车辆来说,如升降机、集装箱搬运车等仍需较长管路。
6.2电液制动系统
电液制协系统的优点是能够改善系统的性能和操作人员的舒适性。制动阀可安装在远离驾驶室更接近于制动器的位置,以减少管路的消耗。无需采用更多的液压阀及管路就能使远程操作更容易。以轮式装载机为例,其典型的电液制动系统如图9所示,将电液技术引入全动力系统,需要安装带有踏板角度传感器的电子踏板、电控单元、阀驱动器及电液制动阀以取代原有的连接和压力制动阀。保留原系统中的带有安全阀的泵、蓄能器充液阀、蓄能器及制动器。
电子踏板可以提供与踏板转角成比例的反馈力。踏板角度传感器将踏板角度转换为电信号,输入电子控制单元。可编程控制单元将控制电流输入到比例电磁阀的电磁线圈。阀芯移动到所输出的制动压力与电磁线圈力按比例保持平衡的位置。尽管看起来从踏板转换到制动压力更复杂,但可编程的控制单元使系统设计者能够实现机械系统无法达到的更柔性的传递功能。信号还能够与发动机电子控制器及变速箱控制器共享,从而大大改进车辆的性奶。阀驱动器由可移动安装的全封闭集成电路构成,它将低能量的控制信号转化为高能量的阀驱动电流。电磁制动阀的输出压力可以达到200bar以上,并能按输入电流呈比例变化。当用于比例系统时,该阀能够为线控制动系统、防抱制动系统及牵引控制系统提供无动力常规制动和紧急制动所需要的液压动力。
7线控制动系统的关键技术
汽车制动系统的发展方向是去除整个液压系统,且没有机械或液压后备系统的纯粹线控制动系统。由于没有备用系统,系统的可靠性要求更高,并且必须是能容错的;另外还要求系统要具有与现有系统一样的制动性能,且系统的使用寿命要长、易于维护、价格便宜、价格便宜、适合批量生产等。因此,线控制动系统需要具有可靠的能源来源、容错的通信协议及一些硬件的冗余控制等。下面是线控制系统的一些关键技术。
7.1执行器的能量需求
鼓式制动需100W的功率,而盘式制动则需要1Kw。12V的车辆电气系统难以支持执行电气制动的高功率需求。因此,建立42V电压系统十分重要,同时需要解决高电压带来的安全问题。
7.2容错的要求
在完全取消了液压元件的系统中,没有独立的后备执行系统。虽然许多技术能提高容错系统的安全性,但根本的方法还是提供后备系统。当节点或电子控制单元出现故障时,在不破坏现有系统完整性的情况下,启用后备装置。容错程序应随应用场合不同而不同。但重要的传感器和控制器都应该有备份。另外,系统中每一个节点之间的串行通信必须支持容错。容错就需要开发相应的通信协议,因为现在车辆应用的一些普通通信系统,如CAN等都不能满足容错的要求,所以需要开发一种新型的通信协议。目前世界上对协议研究的比较多,有TrP/C、FlexRay、TYCAN等几种。
7.3制动执行器的要求
装用电机控制的制动执行器,要求高性价比的半导体具有较好的高温性能,以随在制动执行器附近产生的高温。另外,需要开发质量轻、价位低的车辆制动器,而且由于轮毂尺寸的限制,它们的尺寸也需要满足设计要求。
7.4抗干扰处理
车辆在运行过程中会有各种干扰信号,目前常用的抗干扰控制系统有对称式和非对称式两种,对称式抗干扰控制系统是用两个相同的CPU和同样的计算程序处理制动信号;非对称式抗干扰控制系统是用两个不同的CPU和不同的计算程度处理制动信号,两种方法各有优缺点。另外,线控制动系统的软件和硬件如何实现部件化,以适应不同车辆的需要;如何实现底盘的部件化,是关键的问题。只有将制动、转向、悬架、导航等系统进行综合考虑,从算法上部件化,建立数据总线系统,才能以最低的成本获得最佳的控制系统。
8结束语
线控制动技术是一种全新的制动理念,它极大地提高了汽车的制动安全性。现在汽车制动控制技术正朝着线控制动控制方向发展,线控制动系统将取代以液压或气压为主的传统制动控制系统。同时,随着其它汽车电子技术特别是超大规模尺寸不断减小集成电路的发展,电子元件的成本不断不降、汽车线控制动控制系统将与驾驶系统等融合在一起成为综合的汽车电子控制系统。线控制动系统要想全面推广,还有不少问题需要解决。首先是驱动能源问题,将来车辆动力系统需采用高压电,加大能源供应,同时需要解决高压电带来的安全问题。其将是控制系统失效处理。需要一个备用系统保证制动安全。再将是抗干扰处理,车辆在行驶过程中会有种种其他汽车电子系统如汽车电子悬架系统、汽车主动式方向摆动稳定系统、电子导航系统、无人驾驶系统等融合在一起成为综合的汽车电子控制系统,未来的汽车中就不存在孤立的制动控制系统,各种控制单元集中在一个ECU中,并将逐渐代替常规的控制系统,实现车辆控制的智能化。
参考文献
[1]陆刚;汽车制动控制系统新技术及其未来[U]。电子技术。2005.5.
[2]全国汽车维修专项技能谁技术支持中心编写组.制动系统[M]。教育科学出版社,2004
[3]林慕义张文明,宁晓斌-线控制动系统在轮式工业车辆上的实现[J]。机床与液压,2004

 京公网安备 11011302003690号
京公网安备 11011302003690号


