



- 收藏
- 加入书签

基于智能化测量装备的精密工程测量技术在建筑工程中的应用研究
 打开文本图片集
打开文本图片集





摘要:动态精密工程测量技术能够准确监测建筑物结构的状态变化,包括人工因素、环境因素等影响因素造成的建筑物形变,可能会引发安全隐患。如今,得益于“大智云移物”先进技术的发展,精密工程测量逐渐向动态化方向发展。本文先是介绍了基于智能化装备的精密工程测量技术特征,再论述“动态性”的内容,以及设备集成与智能化数据处理方法,然后阐述在公路路面、水利工程等场景下的实践应用。
关键词:精密工程测量;动态性;建筑工程;智能化测量装备
引言:
进入新世纪以来,我国在大科学工程建设方面取得突飞猛进的成效。伴随着宏观环境不断发生变化,我国建筑行业景气度逐渐下降,展望行业发展未来,“淘汰赛”已经开启,市场正式进入存量时代。未来数年,以高速铁路、超高层建筑物、公路与铁路隧道、大型桥梁为代表的大规模工程建筑物的服役状态持续发生变化,当建筑运营维护阶段进入中期后,若是维修保养不当,可能会引发事故并威胁人民生命财产安全。高精度的精密工程测量技术能够准确获取大型工程建筑物物理属性与几何形状的数据,能够精准评估其服役状态。如今,建筑行业数字化趋势不可逆转,动态精密工程测量技术逐渐成为智能建造的重要标志,能够极大提升工作效率。本文先是论述精密工程测量技术的发展历程,再介绍基于智能化装备的动态精密工程测量技术原理,以及在建筑工程项目中若干场景的实际应用。
一、精密工程测量技术的概述
(一)传统精密工程测量技术
精密工程测量技术是以测绘学理论及方法为基础,融合了计量学等新技术,运用专业设备进行数据采集,获取的图形资料与信息数据能够为解决复杂工程问题提供依据。多年来,精密工程测量的绝对精度能够达到1×10-5以上,广泛应用于高速铁路、载人航天、核工程等领域,发挥着不可替代的重要作用。
关于传统精密工程测量技术的应用研究,主要集中于交会测量、工业测量以及变形监测三个方向。例如,利用高速摄影相机对被测目标进行拍照,运用图形图像处理软件进行摄影测量分析,便可直接得到目标的几何形状,尤其是适合测量点较多且难以直接接触的目标。基于基本平差解算模型的摄影测量精度优于±()。变形监测数据处理是建筑领域的重点研究方向,建筑软件设计方通常嵌入数学模型,如回归分析、马尔科夫、神经网络、时间序列分析模型,用于模拟变形体的动态特性。限于篇幅,关于传统精密工程测量技术的研究成果不再赘述。
考虑到传统精密工程测量技术服务于建筑工程项目建设的实践需求,以高速铁路建设工程项目为典型应用案例,精密工程测量工作包括:一是勘察设计阶段,主要包括CPO、CPI以及线路水准高程控制测量。二是施工阶段,利用CPI与CPII定期复测轨道控制网,以及线下工程结构变形状态的测量工作等等。三是竣工阶段,以高速铁路轨道竣工测量为主要工作,线下工程结构变形监测数据分析为辅。四是运营阶段,主要是定期开展结构变形监测,目的是确保高速铁路轨道保持高平顺性,不同级别的平面控制网测量参数分别是CPO点间距50km,相邻点误差20mm;CPI点间距≤4km,相邻点误差10mm;CPⅡ点间距600m至800m,相邻点误差8mm。CPⅢ点间距400m至800m,相邻点误差<1mm;
(二)动态精密工程测量技术
前文得知,传统的精密工程测量技术应用于建筑工程项目中,通常采取布设平面控制网的方式,将精密测量仪器布设在若干个重要节点,存在测量成本高、效率低、难以全覆盖等短板。以高速公路项目运维工作为例,考虑到车辆正常运行的需求,采取传统的贝克曼梁法开展路面回弹弯沉测量工作,不仅时效偏低,还需临时封闭道路,综合成本偏高且难以落实。再次以高速铁路项目运维管理工作为例,若是将高精密测量仪器安装在轨道状态检测平台,便可实现动态的精密测量,成本低廉且效率较高,契合当下建筑央企深入开展工程项目降本增效专项行动的要求。
本文引用李清泉(2020)的著作《动态精密工程测量》中若干观点,将“动态性”界定为:测量目标处于运动状态下的精密工程测量。其中,被测对象主要指建筑工程类别的桥梁、公路隧道、堤坝、高速铁路等。测量仪器应当放置于无人机、工业机器人等智能化装备平台。在工程实践中,测量人员使用GNSS进行位置、姿态测量,亦或是使用激光雷达完成表观测量,也可运用多波束声呐等设备实现内部测量。当获取到目标对象的多源几何和非几何数据后,内嵌数学模型的智能软件自动完成数据处理,便可实现目标建筑物的变化特征测量。
二、基于动态测量系统实现目标对象的智能感知
(一)满足不同工程的感知场景需求
得益于智能化装备的支持,能够满足以铁路、桥梁为代表的大型工程结构物的测量需求。正因为大型工程的结构形面复杂且病害形式多样,以铁路涵洞病害检测工作为例,因病害机理不同而表现各异。例如,表观性状变化可采用三维技术测量,红外相机可测量建筑物表面破损等性状变化,InSAR技术能够测量大型建筑物结构变形等病害。随后,将点云、可见光图像、SAR等多源数据进行整合处理。
结合建筑工程精密测量实践的经验,动态测量系统借助智能化装备的支持,能够满足不同场景下关于测量方法和传感器的差异化需求。以常见的公路建设项目为例,精密测量指标偏多且效率要求较高,动检要求达到80km/h的行车速度。如此,测量单位通常采取车载移动测量的方法,专用车辆安装有热像仪、高速相机、激光雷达等传感器,说明专用测量设备安装集成化传感器这一举措,可视为智能化动态精密工程测量发展的重要标志。
(二)先进技术支持感知时空基准
传感器的集成化处理能够满足动态精密测量的需求,但为了能够有效感知时空基准,即准确获取到时间与信息,不仅要解决若干传感器设备存在的数据协议、工作机理等不兼容问题,还需明确统一的时空基准。举例来说,使用不同传感器测量公路道路的标准不一:相机获取图像的点间距为1mm;线结构光测量车辙的点间距为10mm-100mm;其他传感器的点间距还受测量车辆的行驶速度影响。从测量经验看,中国铁建、中国中铁等大型建筑央企已经建立了内部通用的时空基准,并开发输出数据格式非公开的专用测量装备,确保高动态状态下高速采样的时空同步。当下,专业的测量装备支持感知自动化以及数据标准化。
(三)差异化场景下的测量装备逻辑结构
对于建筑工程项目的精密测量目标,专业的测量装备研发思路受场景需求影响显著,主要表现为外在形态与功能应用两个方面。逻辑结构划分为三个层次,从需求到研发再到行业标准,分别如下:一是建筑工程项目的动态精密工程测量需求,场景包括公路、高速铁路、隧道、地铁、水坝、市政工程等等。二是传感器装备设计,载体平台如测量专用车辆、无人机平台、工业机器人平台等;传感器主要功能为定位定姿(里程计、GNSS)、感知等;涉及到的关键技术有传感器集成控制模型、统一时空基准、数据输出格式标准等。三是标准起草,覆盖了数据采集、可视化以及测量装备的集成。
在工程测量实践方面,对标Greenwood、Roadware等国外先进装备,国内央企已经初步实现此类动态高精度测量装备的国产化应用。以公路交通移动测量为例,测量平台安装相机、雷达、线结构光等传感器,专业软件支持多传感器的同步控制,输入定位定姿信号后,启动测量车辆,输入里程计信号并自动触发基准信号,再传输给多个传感器并驱动其工作,并支持触发信号与时空基准关联,传输至服务器后,生成带有时空信息的数据并自动存储至硬盘,同时实时传输至后台进行数据解算。例如,测量车辆运行时,系统后台能够实时分析公路弯沉测量数据,极大缩短测量公路段的封闭时间。
三、具有多源特征的测量数据智能化处理
(一)传统的测量数据处理方法
在建筑工程项目测量工作中,通常会用到路面检测、隧道测量、路面弯沉测量、轨道检测、管道检测机器人等专用设备,得到的测量数据存在典型的多尺度特征。为降低观测误差值,一般采取的处理方式有最小二乘准则亦或是马尔科夫法。主要介绍如下:一是总体最小二乘法,难以对系统误差进行精确处理;二是方差分量估计法,存在多源测量数据处理的方差未知性问题;三是动态性卡尔曼滤波法,多源测量参数经过处理后,估计的参数可以满足最优统计要求;四是有偏估计法,存在观测样本不足的缺陷;五是半参数回归法,系统误差无法满足精密测量需求。
(二)智能化的测量数据处理方法
传统的测量数据处理方式具有单一特性,不适用于多源数据的处理。前文所述,基于智能化设备的动态精密工程测量技术,所获得的测量数据具有典型的多源特征,包括影像数据、里程计数据、激光点云等等,再考虑到测量精度、测量点间距的不同,本节主要介绍感知数据的智能化处理手段。
这里引用龚健雅和季顺平(2018)的观点,复杂场景下的建筑工程动态测量数据处理无法利用传统的平差理论所解释,当下的研究方向,主要是将概率学、机器学习等方法与动态测量数据相结合,开展智能化的数据测量与处理。关于处理方法的简要介绍,具体划分为两方面:
第一,建筑工程动态测量数据的处理流程。一是测量数据的初步处理,将不同传感器获取的测量数据进行滤波融合,再降低观测误差,便可得到平差后的测量数据结果。二是测量数据的加强处理,以相片为例,需要剔除阴影、树木等非必要数据信息。三是将源自不同传感器的测量数据进行配准拼接。四是识别并提取测量目标的特征,如铁路涵洞病害、公路路面裂缝、水坝结构形变等等。
第二,不同要素处理的方法。如今,既能实现自动化的动态精密测量,工程软件内嵌的智能算法也可完成数据分析,得出智能判别结果。例如,对于图形图像中的几何要素处理,便是按照“贝叶斯框架融合多源测量数据—基于最大化参数的观测以获取参数—使用贝叶斯滤波方法或者马尔科夫方法完成增强处理”的流程。
四、智能化动态精密工程测量技术的应用
(一)市政工程路面检测
通过对公路路面健康状况进行持续监测,及时对破损处进行修整,能够有效延长路面的使用寿命。相较于传统的人工、巡检车实地检测方式,基于无人机、激光扫描技术的路面监测,能够解决传统精密测量存在的诸多短板。
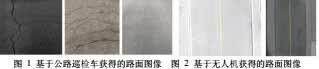
见图1和图2所示,能够看出巡查车获得的路面图像在清晰度、视野方面优于无人机相机性能。结合实践中常用的“图像拼接”技术,能够准确找出路面破损之处。流程如下:一是合理选择图像间的冗余信息;二是运用空间域图像融合方法;三是对将要拼接图像的空间坐标进行变换并融合,融合方法如直接叠加法、取极大值法、直接平均法以及渐进渐出法,但上述方法普遍存在“鬼影”问题,所以可采取具有局部变换特征的小波变换方法。融合过程的机理如下:选择原图像A与原图像B进行拼接,低频分量遵循加权融合原则而生成融合低频图像,高频分量则按照局部方差融合规则,生成融合水平偏高的高频图像,走IDWT流程得出最终的融合图像,案例如图3和图4。
(二)水利工程形变检测
以常见的建筑物为例,需要定期开展变形监测工作。按照动态精密测量技术的要求,可以将倾斜摄影实景三维模型融入其中,再利用全自动伺服测量平台进行数据分析,得出多期测量数据的差分变化数值,作为判断建筑物结构变形的依据。
以水利工程应用为例,使用倾斜摄影技术,相较于传统测量技术,具有以下优势:一是能够获取到多角度的目标物体影像数据,生成的物理模型精度较高且不留死角,并且支持无人机拍摄;二是支持生成点云数据作为测绘成果,并且自动生成DOM。三是适用于三维网格重构为代表的高精度影像建模方法,见图6所示,展示了某水利工程照片实景纹理信息映射至三维层面的结果。
在水利工程动态精密测量工作中,依托倾斜摄影测量系统(无人机、云台、控制系统、高精度摄像机)获取多方位的、带有位姿信息的建筑物目标高精度影像,为后期建模提供依据。
见图7所示,共布设7个控制点和4个检查点,其中两个控制点分布在边坡和导流墙,经过“空中测量—影像密集匹配—三维重建—纹理映射”,能够得出高精度的水利工程建筑物高精度实景三维模型,具体见图8所示。
五、结语
本文介绍了动态精密工程测量技术的基本原理,结合当代基建工程规模持续扩大、结构愈加复杂的趋势,建筑工程测量对高精度与高质量提出了明确要求。为应对现实挑战,本文论述了动态精密工程测量技术的特征与技术机理,再以公路路面检测与水利工程动态测量为例,结果能够准确反映路面裂缝以及某水利枢纽是否发生变形。未来,随着硬件设备的更新迭代,该技术能够在更多建筑工程中得以推广。
参考文献:
[1]张正禄.工程测量学[M].武汉:武汉大学出版社,2013.
[2]李清泉.动态精密工程测量[M].北京:科学出版社,2020.
[3]龚健雅,季顺平.摄影测量与深度学习[J].测绘学报,2018,47(06):693-704.
[4]叶明,唐敦兵.区域清晰度的小波变换图像融合算法研究[J].电子测量与仪器学报,2015,29(9):1328-1333.
[5]邱春霞,张巧玲,董乾坤,等.无人机倾斜影像三维建模中的空地融合研究[J].测绘地理信息,2021,46(6):67-71.

 京公网安备 11011302003690号
京公网安备 11011302003690号


