



- 收藏
- 加入书签

臂式高空作业平台中电池动力系统的应用分析
摘要:本文详细探讨了臂式高空作业平台相关概念,分析了臂式高空作业平台中的电池动力系统发展趋势,梳理纯电池、混合及分布式电驱动等多种系统类型,结合作业环境、需求及成本因素,深入探讨选型要点。发现室内作业多倾向纯电池或串联式混合动力系统,而复杂地形、气候恶劣的施工环境可使用分布式或混合动力系统。并表明在应用这类系统时一定要综合相关因素,基于成本核算进行系统评估,最大化发挥臂式高空作业平台的效能。
关键词:臂式高空作业平台;电池;动力系统
随着全球基础设施建设的持续推进,高空作业的安全工作重视程度也在逐渐提高,臂式高空作业平台市场需求日益增长。在我国臂式高空作业平台起步相对较晚,在开发前期的设备技术多依赖进口,但近年来随着国内企业自主研发能力的提升,中联重科、星邦智能等企业不断突破技术瓶颈,实现了关键技术的国产化,产品性能与质量逐步与国际接轨,应用范围也从传统建筑领域拓展至市政维护、工业安装等多个行业。且在我国环保理念深入人心的情况下,为了适应能源结构的调整趋势,电池动力系统在臂式高空作业平台中的应用需求愈发迫切。传统柴油动力系统因排放和噪音问题会有一定的使用限制,而电池动力系统具有零排放、低噪音的优势,契合当下绿色施工的趋势,成为行业发展的新方向。不同类型的电池动力系统各有优劣,如何根据实际作业场景和需求来合理应用电池动力系统是目前需要解决的问题。
一、臂式高空作业平台电池动力系统相关概述
(一)臂式高空作业平台概念
臂式高空作业平台依照臂架形式可分为直臂式和曲臂式两种(如图1):曲臂式高空作业平台采用多级折臂组合方式设计,场地要求地、灵活方便,可跨越一定的障碍,在一处升降进行多点作业。安全性较好,移动便捷,不过使用成本较高;直臂式高空作业平台臂架呈直线伸展,垂直与水平作业范围较大。当前,臂式高空作业平台主流工作高度一般从 14 m 到 46m,主要采用工作平台自动调平功能及霍尔效应的全比例控制手柄,使用液压系统操控精准,臂架伸缩与变幅动作平稳,配合 360 度回转机构,能全方位覆盖作业区域。随着全球基础设施建设的推进及对高空作业安全重视程度的提升,臂式高空作业平台市场需求持续增长。在发达国家,租赁市场成熟,设备更新换代快;在新兴市场,伴随工业化与城市化进程,其应用范围不断拓展,技术创新也促使产品向智能化、绿色化方向发展。

(二)电动化臂式高空作业平台发展趋势
在过去的十年里,电池技术已经取得了长足的进步,并且还在持续快速发展。臂式高空作业平台的动力驱动方式有柴油发动机驱动以及新兴的电动驱动。而当下,电动化已成为行业发展的显著趋势。传统柴油发动机驱动动力强劲、安全可靠且易于维护保养的优势,使用该动力系统的直臂式高空作业平台在承载较重的负载进行高空作业时,能够更稳定地运行,适用于动力需求较高、作业环境较为复杂的户外场景。但柴油发动机运行时会产生废气排放,对环境造成污染,且运转时噪音较大,在对环保与噪音控制要求严格的室内及城市中心区域作业时会受到一定限制,且柴油燃烧时会产生氮氧化物(NOx)、颗粒物(PM)和二氧化硫(SO₂)等多种有害气体,不符合目前可持续发展的相关理念。
随着全球环保意识不断增强且能源使用日趋紧张,在国家相关政策的引导及臂式高空作业平台工作属性驱动下,其动力系统的电动化趋势也在加快推进中。近年来,锂电技术取得大进步,其能量密度、安全性等均获得显著发展,相较于传统铅酸电池,在相同体积或重量下,能够存储更多电量,对环境的适应性也有明显优势。在星邦智能、徐工、中联重科等企业推出的新型臂式高空作业平台产品中,锂电池已成为主流配置,有力推动了臂式高空作业平台电动化进程。当前纳电技术发展迅猛、产业化快速推进,其工作温域宽、低温性能卓越,并且有 5-10 分钟的极速充电能力,国内头部企业中,中联重科、龙工等制造商也纷纷联合钠电企业,对直臂高空作业平台的电池动力系统进行研究升级。
二、臂式高空作业平台电池动力系统的应用类型
(一)纯电池动力系统
仅以电池为动力源,集中布置驱动电机、控制单元等关键部件,统一为平台的行驶及作业动作提供动力并进行协调调控,系统集成度高能简化管路 动力源集中,在动力输出的协同性上有优势,可让平台动作更协调。由集中的控制 力核心,接收行走、作业等控制信号后,经分动箱等部件合理分配动力到各执行 业需求,精准调控驱动电机的转速、扭矩等,使动力按需传递,驱动平台完成行 检制装里 现相应作业功能以此来满足作业需求。
(二)混合动力系统

根据动力传递方式的不同,臂式高空作业平台混合动力技术路线有串联式混合动力系统和并联式混合动力系统两种。
1、串联式混合动力系统
结合传统燃油动力与电力驱动的先进动力系统,由发动机、发电机、驱动电机和蓄电池等核心部件组成,与传统动力系统不同,串联式混合动力系统的发动机并不直接参与平台的驱动,而是通过带动发电机发电,将机械能转化为电能,产生的电能一部分直接供给驱动电机,驱动臂式高空作业平台的行驶和作业;另一部分则存储在蓄电池中备用,形成以电力驱动为唯一驱动模式的工作方式。当平台处于低负载或低速作业工况时,系统优先使用蓄电池存储的电能驱动电机运行,此时发动机不启动。而当蓄电池电量不足或遇到高负载工况时,发动机启动带动发电机发电,为驱动电机提供电力并为蓄电池充电。
2、并联式混合动力系统
该平台上同时搭载发动机和电机两套独立且可协同工作的动力系统。在小功率需求的作业环境下,系统优先启用电机驱动,此时发动机处于关闭状态,依靠电池储存的电能实现零排放、低噪音作业。而需要处理高功率、高负载的复杂工况,发动机和电机就会协同工作,叠加输出动力。
(三)分布式电驱动系统
分布式电驱动系统相对于发动机驱动,整机在行驶和工作过程中基本没有任何排放污染。臂式高空作业平台分布式电驱动系统主要有两种:桥式电驱动和轮边电驱动。
1、桥式电驱动
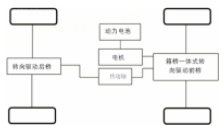
采用传统的桥式结构,将动力传输与车辆行驶功能集成于前后桥,以前后桥为核心承载与驱动部件,动力电池为能量源,电机提供动力,通过传动轴等部件构建动力传输路径(如图3),前桥采用箱桥一体式转向驱动前桥设计,集成转向与驱动功能,能根据作业需求灵活调整行驶方向与动力输出。后桥为转向驱动后桥,与前桥协同,共同控制车轮转动,实现平台的前进、后退、转向等行驶动作。采用前后桥式电驱动,使其底盘结构布局与柴动系列底盘一致,实现了90%主要零部件通用化,大大降低了开发成本、维护成本和备件存储成本。
2、轮边电驱动
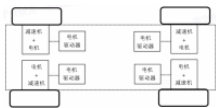
该驱动系统的动力传递路线为:动力电池→电机驱动器→电机+减速机→车轮(如图4),每个车轮都有独立单元,电机驱动器负责给电机发送指令,电机运转后经轮边减速器减速增扭,驱动对应车轮转动。驱动桥被两个轮边电机和减速机所代替,两电机以不同转速运转来实现转弯功能,传动系统相对来说更加轻量化。在应用这类电池动力系统时需要注意:其一,现阶段电驱系统体积功率密度有一定限制,轮边电机布置在车轮内侧,会与悬架等部件产生一定空间占用问题,需精细规划布局避免部件相互交叉影响;其二,四个高转速电机独立驱动四个车轮,对平台的车身稳定性控制要求较高,尤其在起伏或转向路面,需要配合高精度传感器、高速信号传输装置以及高效的控制计算与驱动来执行系统指令。
三、影响电池动力系统应用类型选择的因素
(一)作业环境
臂式高空作业平台产品丰富,能够在室内场馆、户外工地、山地矿区各种场景下作业,在使用这类平台时,需根据作业环境的特点来决定电池动力系统的应用类型。第一,室内作业环境对噪音和排放有着严格要求。例如博物馆、医院、写字楼等场所,传统燃油动力设备运行时产生的噪音与尾气会对室内环境造成污染,因此要选择零排放、低噪音的纯电池动力系统或在室内可关闭发动机的串联式混合动力系统;第二,室外作业环境复杂多变,要重点考虑地形条件和气候因素。在崎岖的山地矿区、松软的湿地等复杂地形作业时,对平台的越野性能和动力要求极高可使用分布式电驱动系统。而在高温、严寒等恶劣气候下,电池动力系统的性能会受到影响,更适合采用混合动力系统。
二、作业需求
在选择臂式高空作业平台电池动力系统时,需针对性地分析具体作业需求,整体考虑作业高度与幅度、作业时长等因素。作业高度直接决定了对电池动力系统续航能力和动力输出的需求,而直臂式高空作业平台在建筑施工、市政工程、仓储物流等作业环境中都能看到其身影。多数作业项目集中在建筑外墙施工、设备安装维护、场馆设施搭建等方面,具有高度高、时间长、工况复杂等特点。室内场馆建设、医院等对噪音和排放要求严格的作业环境,可选择锂电池动力系统;在野外、矿区等地形复杂区域作业,可使用氢燃料电池等续航长、动力强的系统,如Speedy Hire 和 Niftylift 合作制造的氢电动高空作业平台;或者是低温环境下,使用上文所说的钠离子电池动力系统,如星邦钠离子高空作业平台。
三、成本因素
在臂式高空作业平台的电池动力系统选型中,成本因素是核心决定性要素。使用成本作为设备全生命周期支出的关键指标,包含了购置成本、充电 / 换电成本、维护成本及电池更换成本等多个维度。所有的技术方案在落地应用之前,都会有明确的经济可行性评估方案,一定要基于严谨的成本效益分析结果来选取合适的臂式高空作业平台。不同电池动力系统的应用选择,本质上取决于项目预算、使用场景及运营周期。例如,磷酸铁锂电池的性价比较高并且其循环寿命长,在常规建筑施工、市政维护等对续航要求适中的项目中应用范围较广。选型过程中一定要基于科学的成本核算基础,综合对比设备采购、能源消耗、维护保养及后续的升级费用,结合项目周期、作业强度、能耗需求等实际条件,进行系统性评估再去做必选。
结束语:
综上所述,臂式高空作业平台电池动力系统的选型,需全面评估实际的作业环境、作业需求与项目投入的成本因素来选择具体的产品。随着电池技术的持续创新,以及电池动力系统使用成本的进一步降低,臂式高空作业平台电池动力系统的发展方向会更高效、更环保、更经济。
参考文献:
[1]张义,王政,程婷. 臂式高空作业平台动力总成悬置支架优化设计[J]. 建筑机械化,2020,41(7):85-87.
[2]曹丹,祁隽燕. 混合臂式高空作业车控制系统探讨[J]. 汽车实用技术,2021,46(24):166-169.
[3] 于超,徐健,刘延旭,等. 直曲臂高空作业平台装配工艺的优化及应用研究[J]. 造纸装备及材料,2022,51(8):7-9.
[4]杨猛,陈明刚,徐健. 高空作业平台轴承装配工艺优化与应用[J]. 科技创新导报,2021,18(26):28-30,77.
[5]王政,程婷,张艳侠.臂式高空作业平台的动力传动系统及未来发展趋势[J].内燃机与配件,2021,(12):48-50.

 京公网安备 11011302003690号
京公网安备 11011302003690号


