



- 收藏
- 加入书签

低慢小物理拦截系统研究设计
 打开文本图片集
打开文本图片集

摘要:随着无人技术的发展,低慢小对核电厂等重要设施的威胁时有发生,本文基于目前防御技术的缺陷,提出了一种基于智能巡飞器的物理拦截技术,并在机身布局、机翼、垂尾、舵面等技术领域进行了详细设计及验证,其各项指标达到预期目标,具备构建低慢小物理拦截系统的技术条件。
关键词:低慢小,防御,巡飞器,物理拦截
1 引言
随着无人机装备的商业化,无人机针对核电厂的“黑飞”事件时有发生,如英国《每日电讯报》网站 2014年10月30日报道:《神秘无人机入侵法国核电站上方空域》,称“大小足以携带炸药的身份不明的无人机已经从全法国多达7个核电站的上方飞过,这些无人机令人们担心反应堆有遭受空袭的危险,但目前没有任何一架遭到拦截,它们的来源也仍然是个谜”。
我国对低慢小防御高度重视,核行业主管部门、核电集团多次发布加强核电区域无人机管理的要求或启动相关标准研究工作、部分核电运营单位也开展了针对无人机防御的系统建设工作,通过建立有效防范低空飞行物入侵的感知、识别、处置、通报管理体系与技术手段,加强了对核电厂低空空域的安全保卫能力。
但与此同时,因该领域如何合法、高效、可靠实现低慢小的管控,并且最大可能降低附带损伤,通过威胁的识别和分析,进而制定针对性的管控措施,真正实现核电站及核设施“净空”,是核电厂打造全范围、全方位、无死角的安保防控体系的必然要求,是保障核电厂核安全的必然要求,也是核电安全管理部门以及低空安全行业亟需研究的问题。
2 低慢小防御技术现状
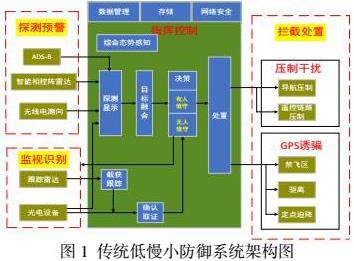
2.1 传统低慢小防御技术体系
一般来说,低慢小反制包括识别与处置两个方面。低小慢识别技术来源于传统的低空探测,结合无线电、大数据网络化等,形成对低空空域目标的探测、识别、组网、协同、处置等一系列手段,实现对低空空域的有效感知和态势分析,达到对低空空域的有效防控。一方面,基于传统的雷达、光电等探测技术,针对低小慢目标的特点,结合神经网络、深度学习等新技术,通过深挖现有技术潜力,提升雷达、光电探测技术能力;另一方面,通过有效集成雷达、光电等多种技术,利用特征认知技术,实现对低小慢目标的多维协同认知和安全态势感知,即探测预警和监视识别。
通常情况下,拦截处置系统由电磁干扰设备和GPS诱骗设备组成。电磁干扰设备根据探测和识别的信息自动计算出所要采取的反制措施,按照设定的规则和参数,自动对目标进行电磁信号干扰,通过对低空飞行器的遥控控制信号和图传信号的干扰,阻断低空飞行器的通信控制,同时对GPS进行干扰,将飞行器截停或自动返航,以达到反制效果。GPS诱导设备通过干扰设备向目标飞行器发射一定功率的定向射频,使得受干扰低空飞行器无法解算自身坐标数据,阻断低空飞行器导航定位功能,使其失控后迫降,或向其发射伪造的导航信号信息,诱使目标飞行器飞向指定降落地点。
2.2 传统低慢小防御技术缺陷
在当前传统技术领域,对于核电站、机场、大型油田等重要区域对低小慢目标的防控需求,主要以雷达探测、无线电侦测和光电探测等方式的低小慢目标的侦测与反制技术体系也因其固有的特征存在缺陷,如:雷达探测存在一定的虚警;无线电侦测不具备全频段侦测能力,且城市环境中电磁频谱复杂、侦测效果一般;光电探测不具备快速大范围搜索能力,受天气环境影响较大等。研究低慢小的有效侦测、可靠反制新技术成为当务之急。
3 智能巡飞物理拦截系统设计
3.1 智能巡飞技术概述
巡飞器是一种可用于侦察、毁伤评估、目标指示、精确打击、中继通信和空中警戒等,通过弹射、炮射或抛投等发射方式发射的可折叠机翼的便携无人飞行器。巡飞器与传统的导弹和大型无人机相比具有诸多优势。与传统导弹相比,其体积小、操纵性强、成本低、可集群化执行任务;与侦察型无人机相比,具有快轻量小型单兵可携带、速进入战区、战术灵活等优势;与攻击型无人机相比,具有便携性好、成本低、隐蔽性强等特点。基于巡飞器上述优势,研究设计一种气动性能优异、结构紧凑、重量轻、便携性好、可集群化执行任务的巡飞器,能够对入侵的低慢小目标识别追踪、物理拦截,弥补传统低慢小防御系统的不足。
3.2 总体设计方案
本方案设计的巡飞器系统包括机体结构系统、电池与动力系统、飞控与导航系统、舵系统、折叠展开机构系统和任务载荷系统。
巡飞器机体结构系统包括机身、前机翼、后机翼和垂尾。电池与动力系统包括高密度锂电池、电机、螺旋桨(包括桨夹和叶片)、电子调速器。飞控与导航系统包括飞控板和数传链路,飞控板上包括双冗余的IMU(三轴陀螺仪、三轴加速度计)、磁力计、气压计等飞控硬件,数据链路包括机载端数传电台和地面端数传电台。舵系统包括分布在机翼和垂尾上的舵面、舵机和传动机构,它们分别是在前翼上的左右副翼舵面和舵机,在后翼上的左右升降舵舵面和舵机,在垂尾上的方向舵舵面和舵机。折叠展开机构系统包括前后翼折叠展开机构、垂尾折叠展开机构、展开限位机构和展开后锁紧机构。任务载荷系统为研究提供的被动毫米波雷达。
巡飞器通过可燃气体燃烧形成筒内压力推动发射筒内活塞机构运动并加速,进而实现巡飞器的筒内发射。筒内发射前,巡飞器通过无线通信进行设备的快速自检与上电预热,出筒后,巡飞器的前机翼、后机翼、垂尾等气动部件由折叠展开机构控制展开,动力系统工作并在导航与飞控系统的控制下,按照相应的飞行任务模式开展巡飞、侦察、编队、攻击、毁伤评估等具体飞行模式状态。
3.2.1 总体设计方案
(1)总体布局设计
巡飞器的布局形式一般包括常规单翼布局和串列翼布局。常规单翼布局,和一般飞机类似,由机翼、平尾、垂尾和尾推或前拉螺旋桨组成,该方案优势在于巡飞器翼载荷高、飞行速度快、气动效率高;缺点是单机翼布置,使得气动焦点比较靠前,巡飞器配平要求较高。串列翼布局由前后两个机翼、垂尾和尾推螺旋桨组成,该方案由前后两个机翼提供升力,可有效减小前后机翼的翼展,降低机翼结构强度刚度的设计难度;通过合理设计前后翼,可以有效减小巡飞器的诱导阻力;前后机翼均产生正升力,使巡飞器焦点位置适当后移,提高巡飞器的带载能力。
巡飞器选用串列翼布局具有独特优势,通过对比了三种串列翼布局的气动性能(前翼上单翼+后翼上单翼,前翼上单翼+后翼下单翼,前翼下单翼+后翼下单翼)。前翼上单翼后翼下单翼布局,在竖直方向前后翼存在一定的高度差,气动性能要优于其他两种布局。通过对比了前高后低串列翼布局和前低后高串列翼两种布局形式,得到了前高后低布局形式的气动性能和静稳定性,均优于前低后高布局形式。
综合考虑上述布局形式的优缺点,本方案选择了高低串列翼布局,上置双垂尾,如下图2所示;前翼在机身上部,储存时向后折叠与机身平行,使用时展开与机身垂直;后翼在机身下部,向前折叠,使用时展开与机身垂直;副翼布置在前翼,升降舵布置在后翼,方向舵在垂尾上。动力采用电动尾推螺旋桨推进。
低速巡飞器,机身设计主要考虑机身内部航电、任务载荷、电池等设备的安装布置,然后以此为约束,以气动阻力最小为目标进行优化,优化得到机身长度680mm。机身头部为长轴半径50mm,短轴半径40mm的半椭球形头罩,用于整流和保护安装在机头的任务载荷设备;前中段为半径40mm,长100mm的近似圆柱形,用于安装任务载荷、航电等设备;后中段为长方体,截面尺寸44mm * 70mm,用于放置电池、飞控等设备;尾部收锥尾,用于安装电机、电调等动力系统部件。
(2)翼型设计
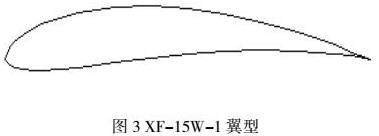
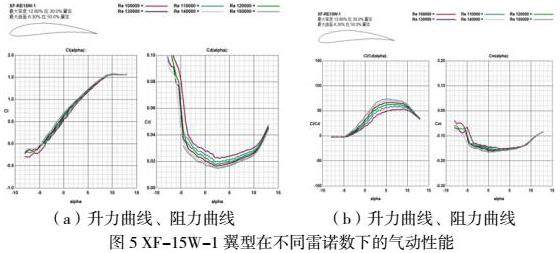
考虑到机翼强度刚度设计难度和舵机安装,翼型厚度应大于12%。本方案选择了NACA 0012翼型为基准翼型,以升阻比最大为优化目标,以翼型相对厚度为约束条件,使用CST(Class function/Shape function Transformation,CST)方法对翼型进行参数化,使用神经网络优化算法在设计域内搜索,得到一款用于该巡飞器的高性能翼型XF-15W-1,如图3所示。XF-15W-1翼型最大厚度12.8%,最大厚度位于距前缘30.0%处,最大弯度6.3%,最大弯度距前缘50.0%。
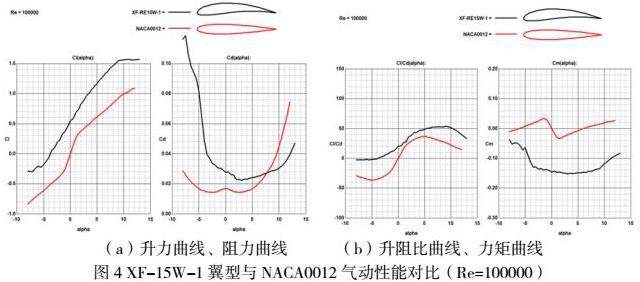
图4对比了优化后翼型与基准翼型的升力系数曲线、阻力系数曲线和升阻比曲线,从图中可以看出,在雷诺数为105量级,优化后的翼型升力曲线斜率较原始翼型有很大提升,升力系数也有很大提升,优化后的翼型在0°攻角约为0.55,在3°攻角左右达到1.0;优化后的翼型在0°~7°攻角阻力系数较基准翼型有略微提升,在大于7°攻角时小于基准翼型;优化后的翼型的升阻比较基准翼型有较大提升。
图5分析了雷诺数在105 ~ 1.5*105(巡飞速度到最大速度)范围的翼型的气动力系数和升阻比,从图6中可以看出,在2°~ 10°攻角范围内,升阻比都有比较好的表现,这非常有利于配置机翼的安装角。
(3)机翼设计
根据重量估算,巡飞器起飞重量约3.8kg,查阅飞机设计手册给出的典型飞机的翼载荷,选择了翼载荷35kg/m2作为初始翼载荷,由此可得巡飞器机翼面积约为0.108m2。由于巡飞器飞行速度低,所以机翼选择了大展弦比的直机翼。前机翼展长820mm,弦长65mm,安装角1.8°,前机翼安装在机身纵向距头部180mm处;后机翼安装在机身纵向距头部575mm处,后翼展长820mm,弦长65mm,安装角2.8°。前后翼均使用XF-15W-1翼型。
(4)垂尾设计
垂尾采用上置双垂尾设计,按照尾容量系数法,确定垂尾面积。参照飞机设计手册,巡飞器垂尾尾容量系数取0.02。由前期设计已初步确定了机体重心位置(距巡飞器头部约340mm),垂尾力臂为235mm。按照下式计算尾翼面积,
所以,尾翼面积为0.014mm2,单个垂尾面积0.007mm2。考虑到折叠后机身高度限制,垂尾弦长38mm,展长175mm。翼型选择了NACA0015。
(5)舵面设计
参照飞机设计手册,一般情况下,副翼的面积占整个机翼面积,副翼弦长占机翼弦长,展长占机翼展长。所以,副翼弦长,半展长,副翼一端距翼梢50mm。考虑到飞机大攻角飞行时,向下偏转角度过大,会造成失速,不能有效实现滚转控制。所以,副翼上偏,向下。
升降舵布置在后翼,尺寸、位置和副翼相同。升降舵弦长,半展长,升降舵一端距翼梢50mm,升降舵偏角。
方向舵布置在垂尾,垂尾下部为安定面,上部为全动方向舵。单侧方向舵展长,弦长,方向舵偏角。
3.2设计方案验证
(1)气动仿真计算
设计完机翼、机身、垂尾等气动部件后,通过CFD仿真计算了巡飞器的气动性能,然后校核了静稳定性。
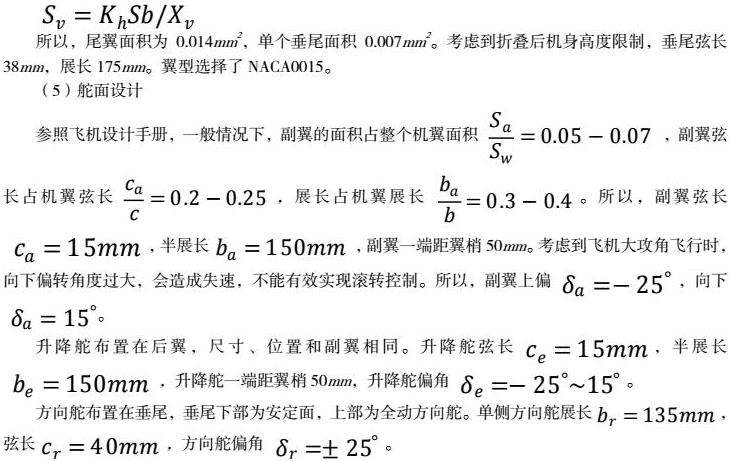
巡飞器建模时使用的坐标系,坐标原点位于巡飞器头部,X轴正方向沿机身轴线指向前,Z轴在铅锤面内垂直于X轴向下,Y轴指向右侧且满足右手坐标系。CFD仿真的流场如图6所示,沿气流流动方向(X轴方向),前后均为30倍的巡飞器长度(21000mm),Y轴和Z轴方向,左右上下均大于20倍的半展长(9000mm)。
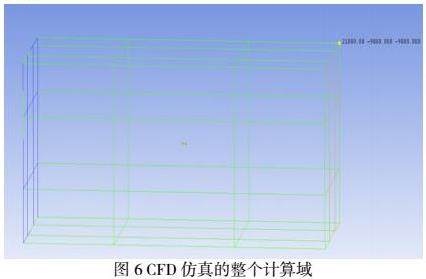
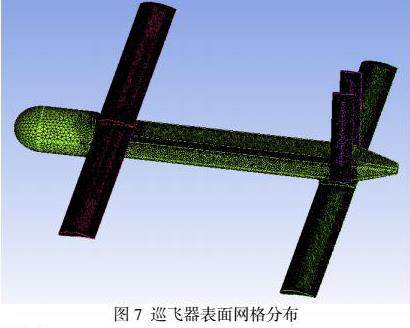
计算使用非结构网格,如图7所示,在靠近巡飞器附近使用边界层网格,边界层第一层高度由Y+<1决定。CFD仿真计算基于CFX定常流动求解器完成,边界设置为速度入口。为了加快仿真速度,使用了敞口模拟方法,远场除设置入口外,其他均设置成opening。计算湍流模型选择k - ω based SST模型,控制方程离散均使用二阶离散格式,收敛条件为最大迭代步数1000 steps或RMS<10-6。
(2)主要气动特性分析
1)气动力分析
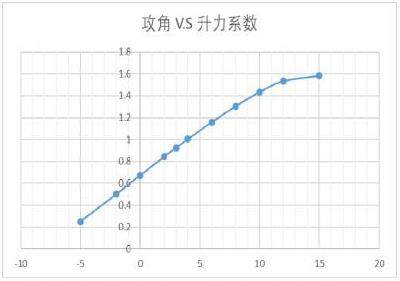
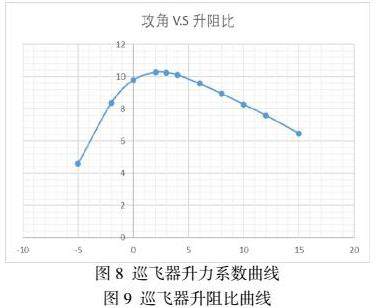
从图8升力系数曲线可以看出,巡飞器在0°攻角时约为0.68,在10°攻角以内升力系数曲线表现出较好的线性特性,在15°攻角左右达到最大约为1.58,巡飞器的大攻角特性较好,在15°攻角以内基本无失速现象,这和翼型特性基本吻合。从图9可以看出,升阻比在0°~ 4.5°攻角都基本在10左右,最大升阻比出现在2°攻角约为10.27。
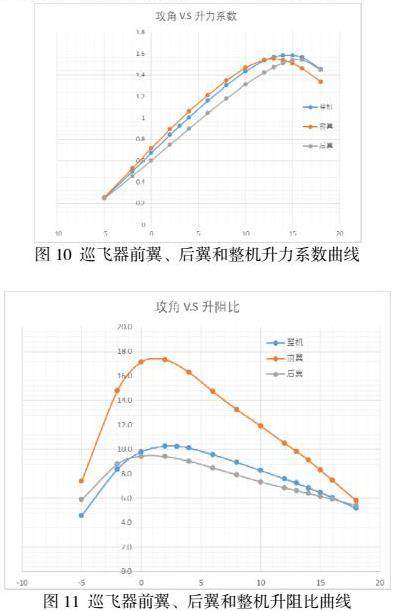
下图10和图11分析了前后机翼和整机的升力系数和升阻比特性,从结果可以看出,前机翼的升力系数大于整机,大于后翼;升阻比也表现出这个趋势。前翼最大升阻比出现在1°攻角左右约为17.75,后翼最大升阻比出现在0°攻角左右约为9.6,整机最大升阻比在2°攻角左右约为10.27。
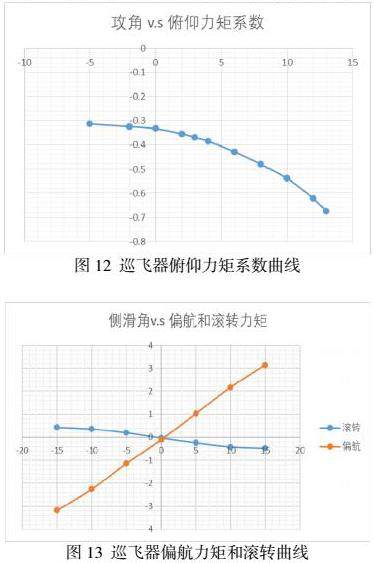
2)静稳定特性分析
图12给出了俯仰力矩系数随攻角变化曲线,从图中可以看出纵向力矩系数对攻角的导数Cmα < 0,所以巡飞器纵向是静稳定的。巡飞器重心位于距头部约340mm处,焦点位于350mm,平均气动弦长65mm,所以纵向静
稳定裕度15.38%。从图13可以看出,滚转力矩系数对侧滑角的导数Clβ < 0,所以巡飞器横向是静稳定的;偏航力矩系数对侧滑角的导数Cnβ > 0,所以巡飞器航是静稳定的。综上,巡飞器是静稳定的。
3 结束语
鉴于目前低慢小防御的形势,以及目前技术的缺陷,并基于智能巡飞技术研究设计的物理拦截系统已具备对低慢小进行物理拦截的能力,下一阶段笔者将进一步开展研究,在系统化、实战化方面进一步测试验证,实现智能巡飞拦截技术与现有系统的协同,提升低慢小防御系统的可靠性。
参考文献:
[1] 张进;薛德鑫;王奉甲.新型重点区域无人机防控系统[J]. 现代防御技术,2020(01)
[2] 汪洋;侯鑫;庞瑞帆.警用反无人机系统需求研究[J]. 航空电子技术,2019(01)
[3] 张志鹏;苏中.拦截低慢小目标的指控系统建模与仿真[J]. 系统仿真学报,2018(11)
[4] 夏铭禹;赵凯;倪威.要地防控反无人机系统及其关键技术[J]. 指挥控制与仿真,2018(02)
作者简介:王猛,1982年4月出生,男,工程师,主要从事核电厂安全防护工作

 京公网安备 11011302003690号
京公网安备 11011302003690号


