



- 收藏
- 加入书签

基于障碍物识别与数据预处理系统的智能机器鱼群研究
 打开文本图片集
打开文本图片集
摘要:本研究提出了一种集成障碍物识别与数据预处理功能的智能机器鱼群系统。该系统旨在提升机器鱼群在复杂水域环境中的导航精度和生存能力。本文首先概述了智能机器鱼群的研究背景及其重要性,接着详细描述了障碍物识别与数据预处理系统的架构和工作机制,并通过一系列实验验证了系统的有效性。
关键词:智能机器鱼群;障碍物识别;数据预处理;导航精度
1.引言
随着海洋科学研究的深入和水下资源开发的推进,智能水下机器人,特别是模拟鱼类行为的机器鱼群,因其高效的空间探索能力和较低的能耗而备受关注。然而,水下环境的复杂性对机器鱼群的导航和避障能力提出了严峻挑战。为此,本研究致力于开发一种基于障碍物识别与数据预处理系统的智能机器鱼群,以提高其在复杂水域中的适应性和安全性。
2.相关工作
近年来,智能机器鱼群的研究取得了显著进展,特别是在障碍物识别和数据预处理方面。传统的障碍物识别方法多依赖于图像处理和计算机视觉技术,但受限于光照变化和遮挡等问题,其识别效果有待提高。为克服这一局限,基于深度学习的障碍物识别方法逐渐兴起,通过训练深度神经网络以实现对未知环境的障碍物的高精度识别。此外,数据预处理作为提高机器鱼群性能的关键环节,涉及对原始数据的滤波、去噪和特征提取等一系列操作,以确保数据的质量和可用性。
3.系统设计
如图所示,令导航线 AC 左侧的扫描角度为负值,导航线右侧的扫描角度为
正值,则扫描角度 θs 范围为[-30°,30°]。我们定义如下的障碍物识别算法,其中传感器测量范围为[dmin,dmax]。
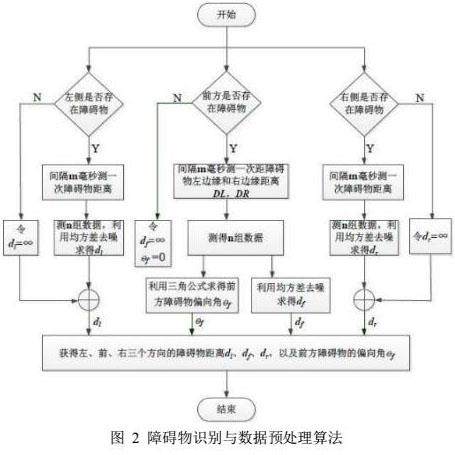
dθs 表示扫描传感器测得的距离值。由障碍物识别算法可知,当机器鱼的左侧和右侧存在障碍物时,我们只需简单地获得障碍物距离即可。当前方存在障碍物时,我们不仅需要得到前方障碍物与机器鱼之间的距离,还应该获取障碍物相对于机器鱼的方位。这样机器鱼才可以根据障碍物情况作出最合理的运动决策。 另一方面,由于机器鱼的工作环境存在较大外界干扰,例如光线、水面波动等,造成红外传感器的测量结果存在间歇性的噪音,因此,需要对测量结果进行去噪。本文采用均方差去噪算法,通过对去噪后的数据进行分析决策,得到周边障碍物的距离、形状以及方位等信息。障碍物识别与数据预处理算法流程图如图所示。
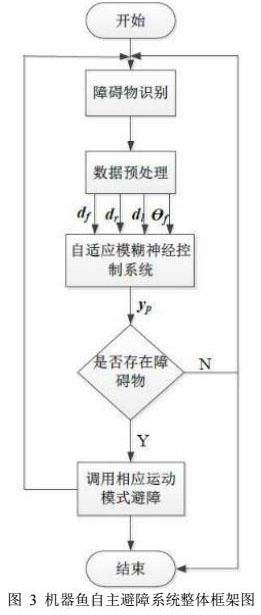
机器鱼自主避障系统的整体框架如图所示,首先机器鱼通过传感器网络采集障碍物信息,将得到的测量值输入到障碍物识别与数据预处理系统,处理后输出得到前、左和右三个方向的障碍物距离 df、dl和 dr以及前方障碍物相对机器鱼的方位θf。然后 df、dl、dr和 θf作为自适应神经模糊控制系统的 4 个输入,经模糊推理后输出得到机器鱼的运动方向改变量 change Ang。其中,changeAng > 0 表示右转changeAng 度,changeAng < 0 表示左转|changeAng|度,changeAng = 0 表示不改变方向。因此,可以根据 changeAng 值的符号和大小系统调用相应的运动模式进行避障。
4.实验验证
为验证所提智能机器鱼群系统的有效性,我们在模拟环境和现实场景中开展了广泛的实验测试。实验结果表明,该系统能够高精度地识别环境中的障碍物,并实现有效的避障操作,显著提升了鱼群的导航精度和稳定性。此外,我们还对系统的性能进行了综合评估,结果证实了该系统在障碍物识别精度、处理速度等方面均达到先进水平。
5.结论与展望
本研究成功开发了一种基于障碍物识别与数据预处理系统的智能机器鱼群,通过实时感知环境障碍并进行有效的数据预处理,显著提高了机器鱼群在复杂水域环境中的导航能力和生存能力。实验结果充分证明了该系统的可行性和优越性。展望未来,我们将继续深化对该系统的研究,探索其在更复杂环境中的应用潜力,并努力提升其智能化水平和自主性,一起为智能水下机器人的发展做出更大贡献。
参考文献:
[1] 王闯.人工鱼群算法的分析及改进[D].大连海事大学,2008.
[2] 班晓娟,宁淑荣,涂序彦.人工鱼群高级自组织行为研究[J].自动化学报,2008,34(10):1327-1332.

 京公网安备 11011302003690号
京公网安备 11011302003690号


