



- 收藏
- 加入书签

智能停车场管理系统设计与研究
 打开文本图片集
打开文本图片集
摘要:基于STM32微控制器,设计了一种能够实现车辆自动进出,车位信息无线传输的智能停车场管理系统。分为了三个部分,首先,在车辆出入场系统中,采用RFID射频识别技术使用户可以快速出入停车场,同时方便停车场记录和管理。为了车辆进出时更加安全,选用红外对射传感器来检测车辆是否完全通过,用OLED显示屏来显示出入场的各种信息。其次,在车位检测系统中,用超声波检测技术来实现车位的检测,利用ZigBee无线通信技术将信息传输到中央控制器,由中央控制器再传输到上位机,方便进行车位的统一管理。最后,基于QT设计开发了上位机管理员界面,主要实现对卡片的各种操作和收费,以及车辆状态的监测,从而提高停车场的管理效率。
关键词:智能停车场;RFID;STM32; 无线通信
1 引言
近年来随着国民经济的快速发展以及城市化进程的加速,导致我国城市人口和车辆数量的快速增长。据相关资料分析,目前我国的汽车保有量增长巨大,2021年汽车保有量达3.02亿量,较2020年增加了0.21亿辆,同比增长7.47%[1]。这些车辆的增加都给城市交通和停车问题带来了巨大的挑战[2]。而传统停车场还普遍存在着很多问题,如停车场内空余车位信息闭塞,管理人员难以统计车流量等[3]。要解决这些问题可以通过改善当前停车场的设备和管理方式,最大化地利用现有的停车资源,充分提高现有停车场的利用率,由此出现了在物联网基础上发展新的停车系统的趋势[4]。智能停车场利用计算机技术、传感器等设备组建,为用户提供便捷,易用,智能的服务,如显示剩余车位数量、控制道闸,收取费用等[5-6]。在此基础上配备物联网技术,可以将检测到的信息无线传输,实时监控,引导车辆,提高了停车场管理系统的高效性、安全性和可靠性,并由此提升了城市形象和居民幸福感,为智慧城市建设打下了良好的基础[7]。
2 系统总体设计
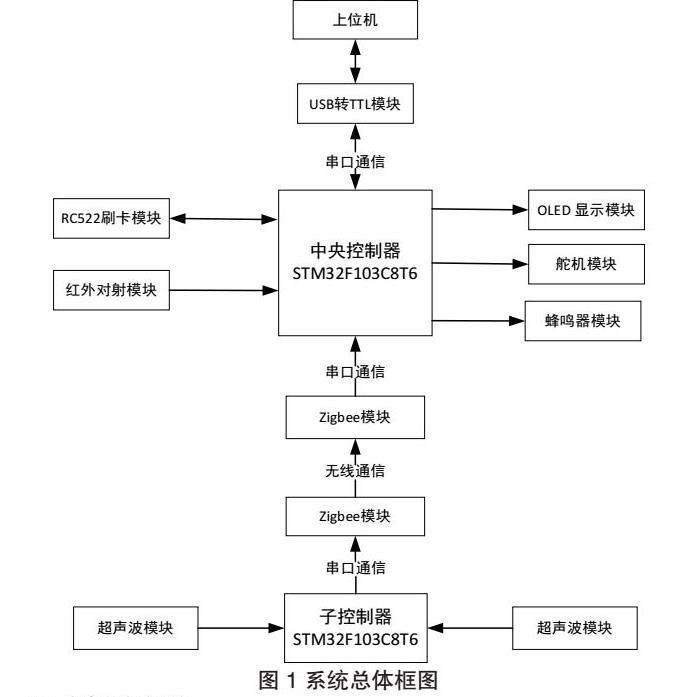
本设计主要来完成一个管理精细,便携优质,并且能够广泛应用的“智能停车场管理系统”。主要包括出入口控制系统,停车场内部车位监测系统和上位机管理员操作系统。
(1)出入口控制系统。主要实现出入口自动道闸和信息显示,出入口的车辆识别主要用到的是RFID射频识别技术,由IC卡和读写器组成,主要实现读卡,充值,扣费等功能。道闸的开启和关闭是用舵机的正反转来实现,检测车辆是否完全驶出道闸所用到的是红外对射模块,安装在道闸下方两侧,用OLED来显示停车场信息,蜂鸣器用来报警提示。
(2)停车场内部车位检测系统。主要实现车位状态检测并传输功能。在停车位上方安装超声波传感器检测来停车位上是否有车,将检测到的数据通过ZigBee无线通信传输给中央处理器,再由中央处理器传给上位机进行显示。
(3)上位机界面设计和开发。上位机界面是用Qt Creactor软件进行设计和开发,和下位机采用串口通信进行数据传输,主要实现用户卡片的管理以及车位状态的显示。系统总体框图如图1所示。
3 系统硬件设计
3.1 出入口系统硬件设计
本系统以STM32F103C8T6作为主控芯片,STM32F103C8T6核心板包括了主芯片,晶振电路,复位电路,启动配置,下载端口,电源电路,电源转换电路这些基本等的电路,方便进行开发及应用[8]。
3.1.1 RC522射频识别模块
读卡原理:RFID系统通过天线实现信息数据在标签与读写器之间传递[9]。当卡片进入读卡器工作范围时,读写器通过天线发射一组固定频率的高频电磁场。发射的电波根据传输特性,被IC卡天线接收,卡片内部的LC串联谐振电路由于同频电磁波激励,产生共振,从而使电容内有了电荷,电荷通过单向导通的电子泵传输到另一个电容内存储,当电荷积累到2V时,此电容可作为电源为其它电路提供工作电压[10]。卡片可根据接收的信号改变卡中的可改变数据,再由天线发射出反馈信息,被RC522读写器接收,从而达到双向数据通信的目的。
3.1.2 红外对射模块
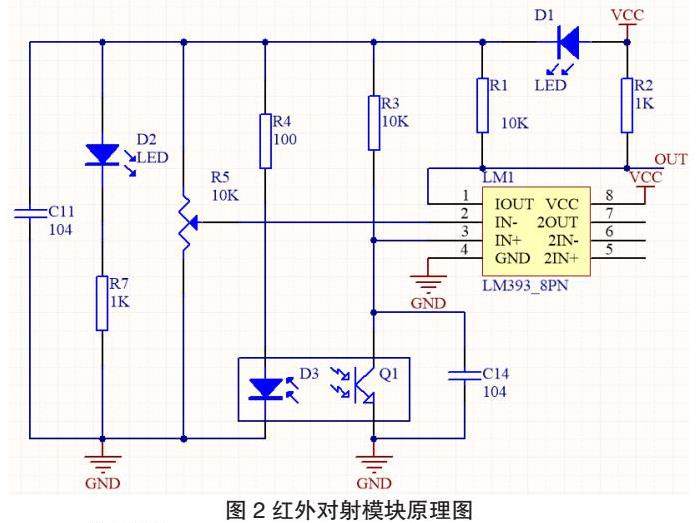
红外对射传感器共三个引脚端口VCC、GND、OUT,其原理如图2所示,中间框里由红外二极管和NPN光电三极管组成,光电三极管上面是一个分压电阻,当槽中没有障碍物时,光电三极管接收到红外光后导通,光电三极管输出端电压接近于0,经过LM393电压比较器与滑动变阻器的电压进行比较,输出为低电平。当槽中有障碍物时,光电三极管由于没有接收到红外光或者强度很大而断开,红外发射管输出端电压接近于VCC,经过电压比较器和滑动变阻器的电压进行比较,输出为高电平。有两个指示灯,D2是电源指示灯,D1是输出指示灯,当上电以后,电源指示灯和输出指示灯都亮,有遮挡物时,输出口为高电平,输出指示灯熄灭。
3.1.3 舵机模块
Sg90是一个小型,低成本的舵机。其工作原理基于PWM(脉冲宽度调制)信号,通过控制输入信号的脉冲宽度来控制舵机的转动角度[12]。舵机内部主要包括电机、减速器、控制电路和反馈电路。控制器输出PWM波到该模块,具体来说,脉冲信号高电平设置为0.5ms-2.5ms,对应转动角度为0-180度,PWM波由其内部控制电路接收将其转换为电流信号,驱动电机旋转,经过一系列齿轮组减速,传递至输出舵盘。舵机的输出轴和位置反馈电位计相连,舵盘转动时,位置反馈器不断检测输出轴位置,将反馈信号输出到控制电路板,控制电路板根据信号调整电机转动方向和速度[13]。如果大于目标角度,电机,反转,小于目标角度,电机正转,最终输出轴固定在指定角度。
3.1.4 OLED模块
OLED显示屏是一种小型的有机发光二极管显示屏,具有自发光,高对比度、高亮度、低功耗、广视角等优点。OLED的分辨率为128x64,因字符和汉字所用的点阵数量不同,OLED显示屏可以显示4行16列的字符,4行8列的汉字。OLED支持4种工作模式,本设计采用IIC接口。
3.2 内部车位检测硬件设计
3.2.1 超声波模块
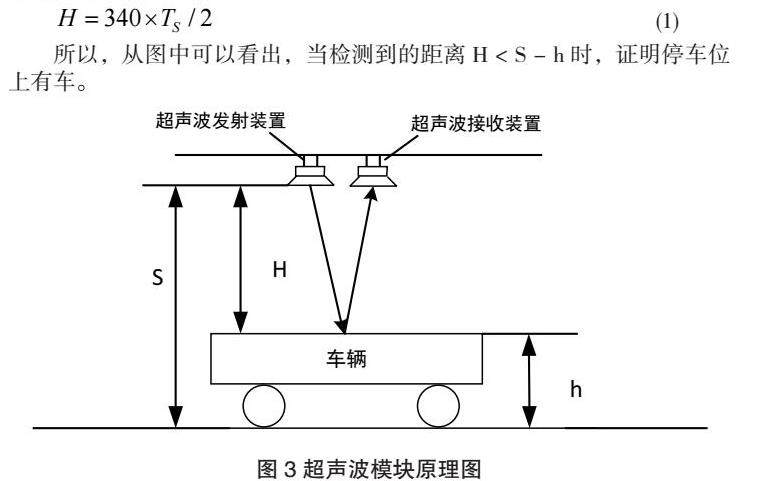
在停车场内安装时,超声波传感器应安装在停车位的正上方位置。超声波测量距离原理如图3所示。超声波发射装置向车位发出超声波,遇到物体后,会反射回接收装置,根据计算此段时间差可以计算出车位与发射装置的距离,从而确定车位是否存在车辆[14-15]。当停车位上没有车时,超声波测得的距离就是安装位置的高度S,当停车位上有车时,测得的距离就是安装位置到车位上方的距离H,设发射和接收所用的时长为TS,设最小高度的车为h,则
所以,从图中可以看出,当检测到的距离H < S - h时,证明停车位上有车。
HC-SR04 超声波传感器模块可提0.4cm-400cm 的非接触式距离检测功能,测量精度可高达 3mm;首先通过控制器I/O 口给模块一个大于等于10μs 的脉冲触发信号,信号由模块内部控制器利用输出驱动电路驱动发射管发出超声波,当模块被触发后,将自动发出8 个40khz的周期的信号,并自动检测是否有回波,模块接收管检测到回波信号,经过内部运算放大电路和比较电路后由模块内部控制器I/O口输出回响信号。回响信号持续高电平的时间就是超其声波从发射到返回的时间,由测得的时间通过式(1),即可算出距离。
3.2.2 ZigBee模块
本系统中用到的ZigBee模块是DL-20, DL-20是一款基于ZigBee协议的无线模块,主要用于物联网应用中的数据传输和通信。该模块采用了TI公司的CC2530芯片作为核心处理器,由 RF电路、CC2530 核心电路、LED 电路、晶振电路、电源电路、按键电路和串口电路组成[16]。支持IEEE 802.15.4标准和ZigBee协议,具有低功耗、高可靠性、自组网和自修复的特性,可以保证通信的稳定性和可靠性,适用于停车场这种复杂的环境。
4 系统软件设计
4.1 中央控制器软件设计
1.车辆入场
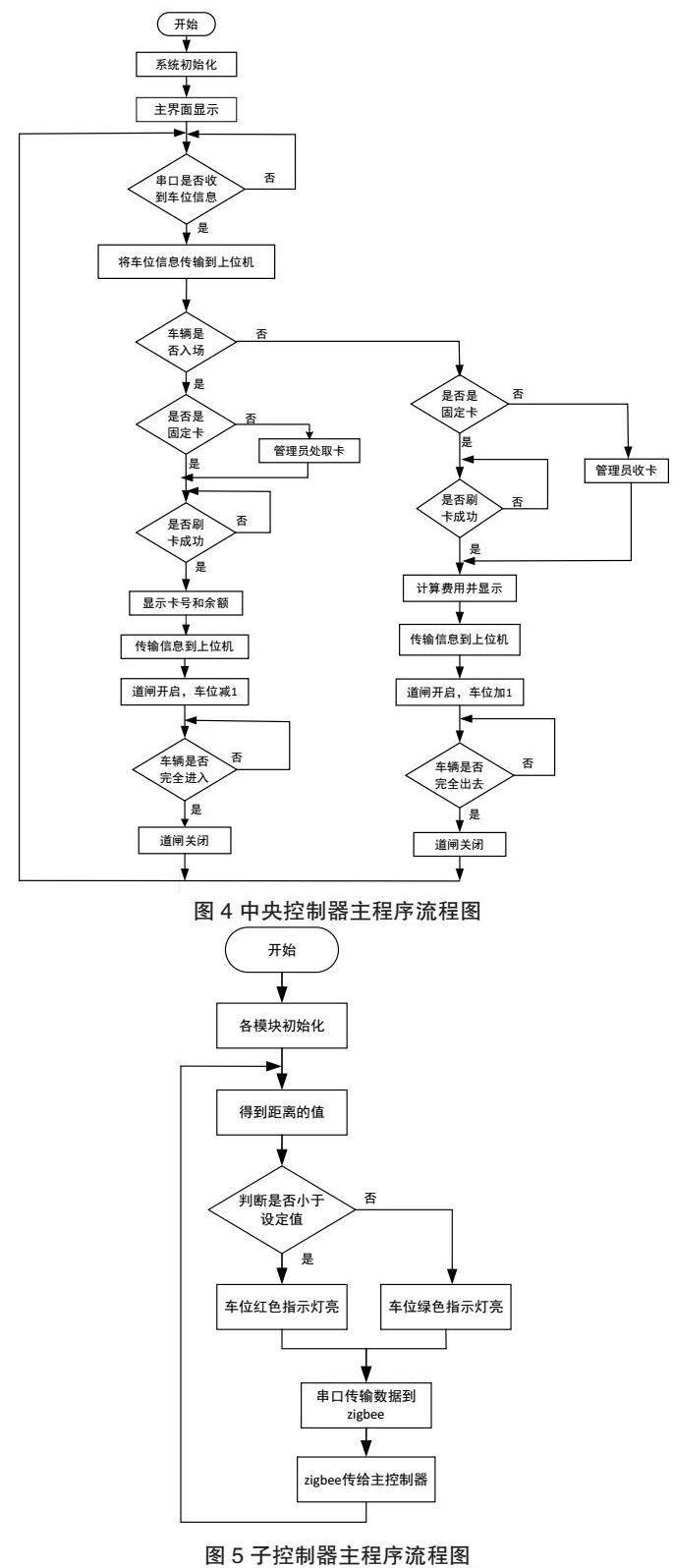
当车主来到停车场后可根据显示屏上信息看到时间以及剩余车位。中央控制器串口一直在查询停车场内车位状态信息,将检测到的车位状态信息传输到上位机。如果为固定卡用户,在停车场入口处车主可以直接刷卡,如果为临时卡用户,需要先在管理窗口领取一张临时卡,之后在读卡器上刷卡,若卡片有效,显示屏显示当前卡号和余额,道闸自动升起,显示屏上剩余车位会减1。同时,中央控制器会将此卡的ID号传到上位机,记录此车的ID号和入场时间,当红外对射模块检测到车辆完全进入停车场后会发信号到中央控制器,再控制道闸自动落下,车辆完成入场。
2.车辆出场
当车辆出场时,如果是固定卡用户,则用户自己在读卡器上刷卡,如果是临时卡用户,则由工作人员收回临时卡,在读卡器上完成刷卡,若有效,中央控制器停止计时并根据停车场计算规则计算此次停车费用,固定卡用户直接从IC卡中扣除完成自动收费,临时卡用户通过人工收费,同时,在显示屏上显示停车时间,停车费用和剩余金额,方便用户知晓本次收费,并将其传到上位机让管理员知晓。收费完成后道闸自动开启,剩余车位加1,当红外对射模块检测到车辆完全进入停车场发送信号到控制器,再控制道闸自动落下,车辆完成出场。流程图如图4所示。
4.2 子控制器程序设计
本设计中一个子控制器连接了两个超声波传感器,用于两个车位的检测。经过对停车场高度和车辆高度的分析,设计将超声波传感器检测到的距离和210cm来比较从而判断车位上是否有车,小于210cm,表示车辆被占用,则车位红色指示灯亮,相反则表示位置空闲,车位绿色指示灯亮,并将信息通过串口传到ZigBee模块,再通ZigBee模块到主控制器。主程序流程图如图5所示。
4.3 上位机管理界面程序设计
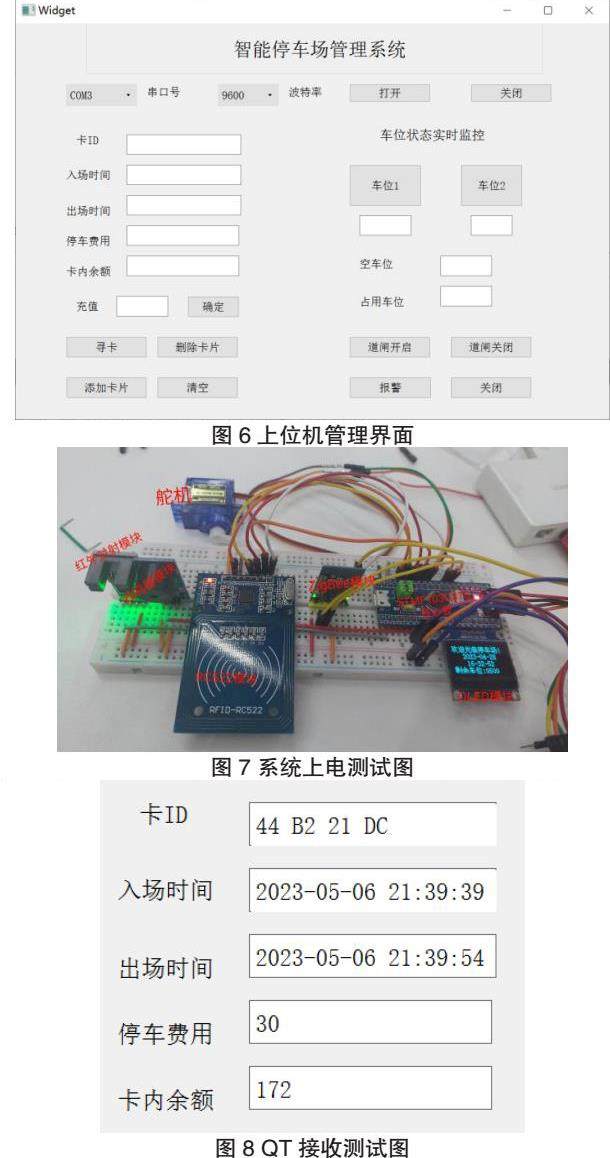
本文所设计的上位机界面是通过串口通信与下位机进行数据通信,如下图6所示。在Qt中实现串口通信,需要添加使用Qt的串口通信类QserialPort,QtSerialPort模块是QT中附加模块的一个模块,可以为硬件和虚拟的串口提供串口通信接口。QSerialPort类提供了许多方法和信号,可以用于打开、关闭、读取和写入串口数据。
使用QSerialPort类进行串口通信的步骤通常包括以下几个步骤:
1.在所需要的文件中加入QserialPort类。创建QSerialPort对象,寻找端口号。
2.打开串口,设置端口参数,包括串口波特率,数据位,停止位和校验位。
3.连接readyRead()信号和串口接收槽函数,以便在接收到数据时进行处理。
4.使用write()方法向串口发送数据。
5.关闭串口。
5 系统测试
5.1 出入口功能测试
出入口功能测试需要红外传感器,刷卡模块,舵机和OLED一起联合调试,主要测试出入口能否实现自动进出。系统上电以后,如图7所示,显示屏显示时间,剩余车位等信息,初始车位设置为500。
当车辆入场时,用户刷卡成功,OLED会显示当前卡号和卡内余额,之后,舵机会旋转90度,表示道闸打开,车辆可以进入,显示屏剩余车位会减1,变为499,车辆在通过道闸的过程中,红外传感器输出指示灯灭,当车辆完全通过道闸后,输出指示灯亮,舵机返回到原来位置,表示道闸关闭。
当车辆出场时,用户刷卡成功,显示屏上会显示当前的停车时间、停车费用以及卡内余额。之后,舵机会旋转90度,表示道闸开启,车辆可以出去,显示屏剩余车位加一,又变回500,同样,车辆完全出去后,舵机回到原来位置,道闸关闭。
5.2 串口通信测试
QT上位机和STM32下位机串口通信的测试主要是看双方是否都能够正常收发数据,首先是STM32发送ID号,入场时间,出场时间,卡内余额等信息,QT接收这些信息并正确显示,如下图8所示,能够正确显示。然后测试QT发送,在QT按下删除卡片按钮,会发送特定指令到STM32,收到指令后,会将RC522卡的信息删除,删除成功后STM32又会发送信号到QT,QT接收到以后会弹出已删除此卡片提示框,表明系统发送数据成功。
5.3 无线通信功能测试
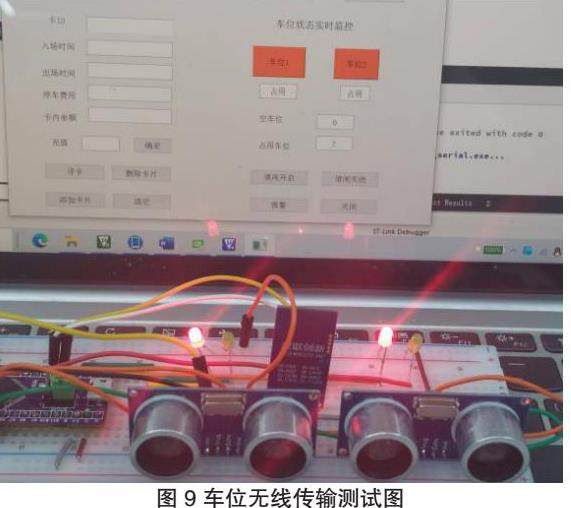
车位状态无线通信测试主要是测试车位信息能否能从子控制器通过无线通信传到中央控制器,中央控制器再通过串口通信传到QT上位机。ZigBee无线通信用下位机的车位占用情况和管理界面的车位状态联合来进行测试,如下图9所示,子控制器车位状态红灯表示占用,绿灯表示空闲,图中车位指示和管理界面对应都是红灯,表示两个车位都被占用。说明车位信息从子控制器端到上位机中间的传输过程是正常的。
6 结论
本文针对目前传统停车场存在的一些问题,设计出了基于嵌入式技术,RFID技术,ZigBee技术的智能停车场管理系统,主要包括出入口控制系统,内部车位检测系统和上位机管理界面,并详细介绍系统所用到的各个模块的所实现的功能,工作原理以及电路连接图。之后介绍系统中央控制器软件设计和子控制器软件设计,最后对系统进行测试,包括车辆出入口功能测试,QT串口通信功能测试和车位状态无线通信功能测试,测试结果表明各模块运行正常,可以实现设计功能,达到了设计目标,可以使得停车场的车位利用率更高,安全性更强,管理更加有效,能够在实际场景中得到广泛应用。
参考文献:
[1]岳倩.汽车保有量超3亿辆 新能源汽车同比增59.25%[N].中国质量报,2022-01-13(006).
[2]陈青长,沈斐然,李建.低碳高效快捷停车系统的开发应用[J].实验室研究与探索,2016,35(07):252-255.
[3]李坤.智能停车场车位检测与泊位诱导系统研究与设计[D].北京:中国科学院大学(工程管理与信息技术学院),2013
[4]张楠楠,张晓.基于物联网技术的智能停车场系统设计与实现[J].现代电子技术,2020,43(12):38-41.
[5]姚琳.基于物联网技术的智能停车场管理系统的设计与实现[D].哈尔滨:哈尔滨工业大学,2020.
[6]孙曜.智能停车场信息管理系统设计与实现[D].扬州:扬州大学,2020.
[7]张利.面向宜居环境建设的智慧停车产业发展研究[J].人民论坛·学术前沿,2018(09):90-93.
[8]曹建平,丁坦,杨辉.基于STM32的WIFI控制金属探测小车系统设计[J].实验室研究与探索,2020,39(09):79-83.
[9]张徐之,李康,王芳,赵维巍.RFID系统的标签天线设计与应用综述[J].电子元件与材料,2022,41(01):1-8.
[10]赵永涛.基于51单片机的RFID门禁密码锁设计[J].自动化应用,2022(12):185-187+191.
[11]杨飞,姜钧,魏英.基于微控制器的智能化开放实验室管理系统设计[J].实验室研究与探索,2020,39(02):249-253.
[12]李兴泽,王福平.基于CCD摄像头的小区自动循迹停车系统[J].计算机应用,2013,33(S1):321-323.
[13]王凤祥,张志杰,陈昊泽.六自由度机械臂系统设计与控制方式研究[J].电子测量技术,2021,44(04):1-8.
[14]韦倾,陈娇英,陈延明.基于Zigbee技术的停车场管理系统设计[J].广西大学学报(自然科版),2019,44(05):1284-1289
[15]王军宇.基于ZigBee的智能停车场管理系统的研究[D].长春:吉林建筑大学,2017.
[16]丁晴.基于ZigBee的分布式实验室温湿度监测系统[D].贵阳:贵州大学,2015.

 京公网安备 11011302003690号
京公网安备 11011302003690号


