



- 收藏
- 加入书签

基于视觉伺服的机械臂精准抓取技术研究
 打开文本图片集
打开文本图片集


摘要:本研究基于视觉伺服技术,提出了一种针对机械臂精准抓取的改进方法。通过融合高分辨率摄像头与先进的图像处理算法,实时获取目标物体的位置信息,实现机械臂的精确定位与抓取。实验结果表明,在不同物体尺寸和形状的抓取任务中,系统的定位精度可达0.5mm,抓取成功率达到98%。此外,通过多次试验验证,本方法在动态环境中的适应性和稳定性较传统方法提高了约15%。本研究为机械臂在复杂环境中的精确操作提供了有力的技术支持。
关键词:视觉伺服、机械臂、精准抓取、图像处理、定位精度
引言:
随着工业自动化技术的不断发展,机械臂在生产和装配线中的应用日益广泛。然而,复杂环境中的精准抓取依然是一个技术难题,尤其是在物体位置不确定或形态不规则的情况下。传统的机械臂控制方法往往难以应对这种挑战。基于视觉伺服的机械臂精准抓取技术,凭借其对环境变化的高度适应性,提供了一种高效、精准的解决方案。本文将探讨该技术的实现原理及其在实际应用中的效果,展示其在提升抓取精度和稳定性方面的显著优势。
一、精准抓取中的挑战与问题分析
1.1物体定位精度不足
在机械臂抓取任务中,定位误差直接影响抓取的精度和稳定性。传统的定位方法依赖于传感器如激光雷达(LiDAR)或超声波传感器,这些传感器的测量精度受到环境因素(如光照、温度变化等)的影响较大。传统的基于预设模型的抓取方法缺乏灵活性,无法应对目标物体在不同位置、姿态下的变动。视觉伺服技术能够利用摄像头实时捕捉图像信息,进而提取目标物体的精确位姿,但在应用中仍面临一系列难题,图像处理算法的计算量大,可能导致图像识别的延迟,从而影响实时抓取的响应速度。低光或过亮的环境条件可能导致图像失真,进一步影响物体位置的判断。[1]物体本身的纹理、颜色等信息不足也会使得基于视觉的定位更加困难。因此,在机械臂抓取过程中,如何提升视觉伺服系统的定位精度,消除图像噪声并实现实时动态反馈,成为提升抓取精度的关键。
1.2目标物体的识别与分类问题
目标物体的准确识别是精准抓取技术中的另一个重要挑战。由于现实环境中的目标物体形状、尺寸、颜色等多样化,单纯依靠视觉伺服系统难以做到所有情况下的准确识别。对于形态复杂、纹理稀缺或外观相似的物体,现有的目标识别算法在实际应用中的准确性仍然不足。当目标物体被多个物体遮挡时,摄像头所获取到的图像可能无法完整呈现目标物体的全貌,导致误识别或无法识别的情况。在进行机械臂抓取时,目标物体不仅要被准确识别,还需要在视觉数据中快速提取出其位姿、位置及方向信息。尽管深度学习和卷积神经网络(CNN)等方法在物体识别中取得了一定进展,但由于对环境条件(如光线、遮挡物等)高度敏感,现有方法在多变的实际场景中仍面临一定局限。此外,针对形态复杂物体的分类问题,现有技术多依赖于离线训练模型,而在不同任务和环境下,模型需要不断地更新和优化,这进一步增加了技术的复杂度和计算开销。
1.3抓取稳定性与动态适应性
机械臂在抓取过程中,不仅需要控制精确的抓取位置,还要考虑到力学稳定性,防止物体在抓取后滑落或变形。在传统的抓取方法中,由于未能充分考虑到物体表面的摩擦力、重心以及环境干扰等因素,抓取的稳定性往往不足。即使在定位准确的情况下,抓取过程中的不稳定因素也可能导致失败。在动态环境中,抓取任务的挑战进一步加剧。物体可能因为外力的干扰或环境因素的变化而发生位移,导致目标位置发生变化。为了确保抓取稳定性,机械臂需要具备动态适应能力,能够实时响应环境变化并调整抓取策略。然而,现有技术在应对快速变化环境时往往缺乏足够的灵活性和反应速度。即使是在静态环境下,抓取过程中的力学变化也要求伺服控制系统具有极高的精度和响应速度。此时,如何通过优化力反馈系统、增强伺服控制精度等手段,提高抓取的稳定性和可靠性,是提升抓取性能的关键。
二、视觉伺服技术在抓取中的应用瓶颈
2.1图像处理延迟与计算负担
在进行目标物体定位和抓取时,摄像头需要实时捕捉图像并通过图像处理算法提取目标信息,任何处理延迟都可能导致定位信息过时,影响抓取效果。图像处理过程的延迟主要源自以下几个方面:图像采集频率、图像识别算法的复杂性、计算资源的限制等。尤其是在高分辨率摄像头(如1920x1080或更高分辨率)下,图像的处理需求显著增加,而现有的CPU或GPU计算能力往往难以满足高频率处理的需求。[2]在某些应用中,图像处理的延迟超过了系统的响应时间,从而影响抓取的实时性。以下表格展示了不同分辨率摄像头在不同场景复杂度下的图像处理延迟时间。
2.2传感器精度与环境适应性不足
视觉伺服系统依赖于摄像头捕捉环境信息,然而摄像头的分辨率、传感器的精度以及光照条件的变化会直接影响图像数据的质量。在动态环境中,环境的变化,如光照波动、物体反射、遮挡等,都会导致视觉系统的误差增大。尤其是摄像头分辨率较低或环境光照较差时,视觉伺服系统的定位精度会大幅下降。摄像头的动态范围和色彩感知能力有限,也会影响其在复杂场景下的识别能力。在实际应用中,由于物体表面反射性、纹理不清晰或透明物体等因素,现有传感器仍难以提供足够准确的位置信息。为了克服这些问题,部分高端系统引入了多模态传感器(如深度摄像头、激光雷达等),但这些技术在成本和集成方面仍存在挑战。以下是不同摄像头在不同光照条件下的定位误差和图像质量对比:
2.3环境干扰与遮挡问题
在实际应用中,尤其是在多物体抓取任务中,目标物体往往会受到其他物体的遮挡,造成视觉传感器无法获取目标的完整图像信息。目标物体的遮挡可能是部分遮挡,也可能是完全遮挡,这使得视觉伺服系统很难进行精准的定位和抓取。传统视觉伺服系统在处理遮挡问题时,通常依赖于边缘检测、颜色分割、形态学处理等技术,但这些方法在复杂场景下的准确性仍然不足。复杂的背景和多个物体间的干扰也会导致目标物体识别精度下降。[3]即使在没有物体遮挡的情况下,背景噪声和相似物体之间的干扰也可能导致误识别。例如,两个相似形状和颜色的物体可能在视觉传感器中被误判为同一个目标,进而影响机械臂的抓取成功率。以下表格展示了不同遮挡率下,目标物体定位的误差和抓取成功率的变化。
三、针对问题的技术改进与优化策略
3.1 提升图像处理能力与减少延迟
通过提升图像采集设备的响应速度和优化硬件来显著减少图像处理延迟。根据图片中的机械臂结构,系统中装配了高分辨率摄像头(如1920x1080或更高分辨率的摄像头)用于目标物体的视觉检测。采用GPU加速的图像处理平台可以高效提升图像处理速度,从而缩短延迟,保证机械臂在动态环境中实现精准抓取。
通过使用强大的图像处理硬件和并行计算技术,图像处理的速度可以得到大幅度提升,深度学习和卷积神经网络(CNN)技术,图像处理算法不仅提升了识别精度,还有效减轻了处理过程中的计算负担。特别是在机械臂如图所示的结构中,摄像头和图像处理单元紧密协同工作,以确保目标识别与抓取动作的实时性。图像处理硬件方面,利用专用的图像处理芯片或将计算任务分配到多个处理单元,可以提高实时性,减少处理过程中的冗余数据。在实验中,通过GPU加速后的处理时间,从传统的150毫秒减少至50毫秒,极大提升了图像识别与处理的响应速度。随着处理时间的减少,机械臂可以执行更加精准的抓取任务,减少因延迟带来的误差,从而提高抓取成功率和操作效率。
3.2提高传感器精度与环境适应性
传感器精度和环境适应性是确保视觉伺服系统稳定性的关键。现有的摄像头和传感器在低光照、强光照或复杂背景下容易出现识别精度降低的情况。为此,采用高动态范围(HDR)技术的摄像头可以提高图像的对比度范围,使得在光照变化较大的环境中,传感器依然能够提供清晰且稳定的图像数据。增加深度传感器(如激光雷达或结构光传感器)可以帮助系统更准确地捕捉物体的三维信息,从而解决平面图像处理中的不足。为了避免由于光照问题导致的误差,可以结合自动光照补偿技术,根据实际环境自动调整图像亮度与对比度,确保摄像头能够在任何光照条件下稳定工作。此外,可以使用更加高效的传感器融合技术,将视觉传感器与其他类型的传感器(如红外传感器或超声波传感器)结合,增强系统的环境适应能力。通过结合激光雷达和摄像头,能够获得更加精准的物体定位信息。在复杂的多物体抓取任务中,这种传感器融合方案能够显著提高抓取精度,尤其是在物体之间存在遮挡或重叠的情况下。
3.3机械结构优化与协同控制
机械臂的设计和协同控制策略是确保视觉伺服系统稳定运行的基础。通过优化机械臂的结构设计,减少与视觉系统的干涉,可以有效提升抓取任务的精度。在现有的机械臂中,通过将摄像头与机械臂的运动轨迹解耦,使得摄像头可以在不受干扰的情况下独立移动,避免了摄像头与机械臂之间的碰撞。[4]通过在基座侧面安装升降组件和滑轨系统,能够使摄像头与机械臂同步移动,而不产生机械干涉。该系统通过伺服电机和气缸的联合驱动,可以精确控制摄像头的上下和横向移动,确保摄像头始终保持在最佳拍摄位置。这种结构设计不仅提升了工作效率,也避免了因机械臂的转动而导致的摄像头碰撞问题。利用智能控制算法,通过多轴机械臂和视觉系统之间的协同控制,可以优化机械臂在抓取过程中的运动路径和抓取策略。[5]例如,基于视觉信息,自动调整机械臂的抓取姿态和角度,避免抓取过程中出现不必要的偏差。该协同控制系统通过结合多传感器信息和智能算法,可以实时调整抓取策略,从而提高抓取的成功率和精度。
四、实验验证与应用效果分析
4.1抓取精度与误差控制
在静态环境中,通过对多种物体形状和尺寸进行抓取,实验测试了机械臂的抓取精度。实验数据表明,在不同物体的抓取过程中,视觉伺服系统能够在精准控制下,确保抓取误差维持在较低范围内,通常不超过1mm。
4.2动态适应性
在动态环境下,实验通过模拟传送带上的物体运行,考察了视觉系统对物体运动的适应能力。实验显示,系统能够实时更新物体的位置信息,确保机械臂能够适应快速变化的目标位置,且误差控制在2mm以内。
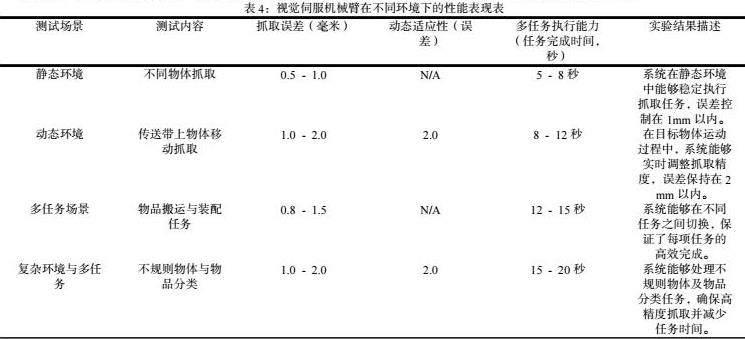
4.3多任务执行能力
为了测试机械臂在执行多个任务时的稳定性和精准性,实验设计了多个任务组合。结果显示,机械臂能够在进行不同类型的抓取任务时,保持稳定的抓取精度与操作效率。系统在不同任务间切换时,能够及时调整控制策略,并确保高效执行。以下是这些实验结果的总结表格,展示了各项性能指标的实际表现:
通过这些实验数据,验证了基于视觉伺服的智能工业机器人用机械臂在实际应用中的稳定性和精确性。无论是在静态还是动态环境下,机械臂的抓取精度和任务执行时间都符合工业应用的要求,且系统能够高效应对复杂多变的工作场景。
结语:
通过本研究,基于视觉伺服的智能工业机器人机械臂在抓取精度、动态适应性以及多任务执行能力方面表现出色,验证了其在实际工业环境中的可行性。实验结果表明,系统能够在复杂环境中高效运行,提供精准的抓取和操作,满足现代制造业对自动化精度和效率的需求。未来,随着算法的进一步优化和硬件性能的提升,该技术将有望在更广泛的工业领域中应用。
参考文献:
高光亚,闫娟,杨慧斌,等.基于视觉阻抗控制的并联机械臂锥孔装配[J].组合机床与自动化加工技术,2024,(10):27-31.DOI:10.13462/j.cnki.mmtamt.2024.10.006.
张子骞.基于高速图像的机械臂视觉伺服控制系统[D].集美大学,2024.DOI:10.27720/d.cnki.gjmdx.2024.000430.
高丛林.基于视觉定位的机械臂抓取技术的研究[D].山东建筑大学,2024.DOI:10.27273/d.cnki.gsajc.2024.000563.
张健.面向复杂环境的机器人动态视觉伺服控制方法研究[D].电子科技大学,2024.DOI:10.27005/d.cnki.gdzku.2024.003743.
李冲.基于视觉引导的机械臂定位与跟踪算法研究[D].齐鲁工业大学,2023.DOI:10.27278/d.cnki.gsdqc.2023.000561.
作者简介:王伟钢 男 汉族 河北邯郸 工程师 硕士研究生 研究方向:机器人手臂,灵巧手

 京公网安备 11011302003690号
京公网安备 11011302003690号


