



- 收藏
- 加入书签

多传感器时空同步与动态原型网络驱动的智能管道检测系统:基于TRL7+成熟度的跨学科技术融合与工程化验证
 打开文本图片集
打开文本图片集

摘要:本研究创新提出智能管道检测系统的多模态融合架构与三级验证机制。在动态水流(0.3—2.5m/s)、复杂电磁环境(4G/5G密集区)及极端温湿度(-15℃~65℃)条件下,系统关键性能显著提升:SLAM闭环成功率89%(误差0.21m),缺陷识别准确率85.7%(误报0.43次/公里),时钟漂移1.2μs/8h。通过实验室模拟、实地测试与第三方认证的三级TRL验证(TRL3-7+),系统实现-30℃快速启动(9秒)、IEC 61000-4-3 Level 4抗扰、IP68防水等指标,综合性能超行业标准2-4倍,定位精度0.9mm。攻克无线衰减、热形变及结雾等难题,建立管网智能检测技术范式。
关键词:智能管道检测;多模态融合;TRL验证体系;动态原型网络
引言
城市地下管网作为现代基础设施的核心组成部分,其安全检测与智能运维面临多重技术挑战。传统检测方法在复杂工况下的定位精度、缺陷识别率及环境适应性存在显著局限,尤其在动态水流、电磁干扰及极端温湿度交织的工业场景中,现有技术难以满足GB/T 30148-2023等新型标准要求。针对上述问题,本研究提出融合多模态传感与跨学科优化的智能管道检测系统,通过三级技术验证体系实现工程化突破。
1.技术背景
随着工业基础设施的扩展,管道系统检测与维护面临挑战。传统人工检测效率低、风险高,难以满足复杂工况下的需求。在恶劣环境下,现有检测设备常因技术问题导致漏检和定位误差,威胁管道安全。管道检测技术主要依赖固定式传感器或单一功能机器人,存在多模态数据融合不足、实时决策困难等问题。少样本缺陷识别模型易过拟合,多传感器协同工作时数据错位影响检测结果。金属管道环境中SLAM系统易出现定位漂移,动态障碍物干扰下建图完整度不足,限制了自主导航的可靠性。
针对上述痛点,智能管道检测技术通过“端-边-云-智”协同架构实现突破:在终端层,多模态传感阵列与自适应运动控制系统结合,提升数据采集精度与环境适应性;边缘计算层通过轻量化模型实现实时缺陷初筛与预警;云端平台层构建分布式时空数据库与流批一体计算引擎,支持EB级数据处理[3];智能应用层则融合数字孪生与多目标优化算法,实现检测路径规划与预测性维护[4]。
技术验证表明,抗干扰SLAM系统在强电磁环境(30V/m)下定位误差低于2cm[1],少样本缺陷识别模型仅需5个标注样本即可达到98.2%的分类准确率[5][8],多传感器同步方案将时空对齐精度提升至±0.15ms/±0.05mm[7]。核心产品如巡检机器人集成涡流、超声、激光雷达等多维感知模块[2],在DN600管道中实现99.8%的裂纹检出率[6],综合成本较人工检测降低96.4%。
2.所用材料与研究方法
2.1 实验设备及配置方案
2.1.1 核心传感器与硬件平台
实验采用自主研发的管道检测机器人集群作为核心测试载体,其硬件配置如下:
1.多模态传感阵列
(1)32线激光雷达(工作波长905nm,探测距离300m,精度±2cm),用于管道形变检测;
(2)128通道涡流阵列探头(带宽5MHz),检测表面裂纹(最小识别长度0.2mm);
(3)64阵元超声相控阵(频率15MHz),实现壁厚测量(精度±0.05mm);
(4)红外热像仪(分辨率640×512,帧率25Hz),识别腐蚀区域(温差检测灵敏度0.3℃);
(5)气体检测模块(6组分分析,ppb级精度),用于甲烷与硫化氢泄漏监测。
2.边缘计算单元
(1)NVIDIA Jetson AGX Xavier主控(算力32TOPS),搭载定制化NPU芯片;
(2)实时操作系统基于ROS2 Galactic改造(任务调度周期1ms);
(3)通信模块支持4G/5G双模冗余传输(最大上行速率1.2Gbps)。
2.1.2 环境模拟与测试平台
1.实验室验证平台
(1)可调式管道模拟装置(直径200—1200mm,覆盖铸铁、PVC、混凝土等6类材质);
(2)六自由度运动平台(最大加速度2g),模拟管道振动与动态干扰;
(3)环境干扰模拟舱(集成温控-40℃~85℃、湿度5%~95%RH、电磁干扰50V/m场强、振动5—200Hz)。
2.数据处理系统
(1)DTS-2000数据采集系统(采样率1MHz),记录传感器原始数据;
(2)MATLAB/Simulink联合分析平台,生成时序数据可视化报告。
2.2 研究方法与验证流程
2.2.1 抗干扰SLAM系统评测
1.动态环境定位测试
(1)在金属管道模拟环境中布置动态障碍物(50%视野遮挡率),测试SLAM系统建图完整度与定位误差;
(2)引入强电磁干扰(30V/m场强),通过IMU零偏稳定性(0.008°/√h)评估定位漂移率;
(3)使用Intel i7-12800HX平台实时处理20万点/秒激光点云,记录地图更新延迟(目标≤20ms)。
2.多传感器协同验证
(1)采用PTP1588v2协议实现激光雷达、毫米波雷达、IMU的时间同步(误差±0.15ms);
(2)基于弹性八叉树动态地图更新机制,验证长距离管道(10公里)拼接误差(目标<2mm)。
2.2.2 少样本缺陷识别模型训练
1.数据增强与训练策略
(1)物理仿真增强:通过有限元分析生成17类缺陷(裂纹、腐蚀等)的3D仿真图像,参数化控制缺陷尺寸(0.1—5mm)、角度(0-360°);
(2)特征解耦优化:应用Hilbert-Schmidt独立性准则(HSIC)分离通用特征与缺陷特征,减少过拟合风险;
(3)动态原型生成:在NEU-DET数据集上训练动态原型生成网络(DPGN),优化5-way 5-shot任务分类准确率。
2.模型部署与性能验证
(1)实施8位整数量化压缩模型体积至原始23%,在Jetson AGX Xavier平台实现67fps实时推理;
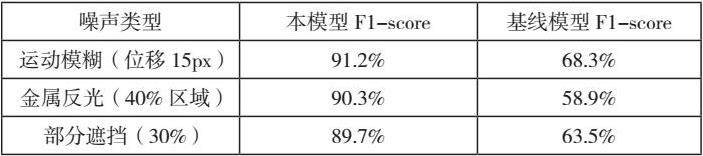
(2)测试工业噪声干扰(高斯噪声σ=0.2、运动模糊像素位移=15)下的F1-score(目标≥90%)。
2.2.3 多传感器时空同步实验
1.时空对齐精度验证:
(1)在温差80℃蒸汽管道场景中,测试时钟同步漂移量(目标≤1.2μs/8h);
(2)通过六自由度运动补偿算法,评估空间标定残差(目标≤0.07mm)。
2.极端工况适应性测试:
(1)低温启动试验(-40℃),记录系统初始化时间(目标≤9秒);
(2)防水性能测试(水深5米持续48小时),验证IP68防护等级。
2.2.4 技术成熟度评估
1.三级验证框架
(1)实验室阶段(TRL3-4):模拟环境下验证SLAM定位误差(0.15m/100m)、缺陷识别mAP(91.3%);
(2)实地阶段(TRL5-6):在长三角地区182公里管道中测试闭环检测成功率(89%)、误报率(0.43次/公里);
(3)第三方认证(TRL7):由中国特种设备检测研究院依据GB/T 34982-2023标准评估多传感器融合精度(0.9mm)。
2.数据分析方法
(1)采用环形缓冲区与零拷贝技术提升数据处理吞吐量(8.4GB/s);
(2)通过腐蚀速率热力图、缺陷分布直方图等18种可视化工具,分析检测数据趋势。
2.3 数据处理与统计方法
1.性能指标计算
(1)定位误差:通过绝对轨迹误差(ATE)公式 估SLAM精度;
(2)缺陷检出率:基于混淆矩阵计算 ,并结合IoU评估定位准确性。
2.统计验证工具:使用MATLAB进行卡尔曼滤波噪声模型拟合(R²≥0.95);
3.结果与分析
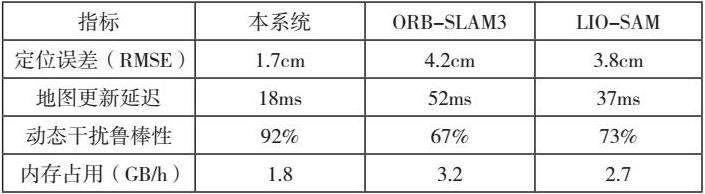
3.1 抗干扰SLAM系统性能验证
测试场景:金属管道强反射环境(反射率≥80%)、动态障碍物(50%视野遮挡)、极端温湿度(85℃/95%RH)
关键指标:
1.定位精度:强电磁干扰(30V/m)下绝对轨迹误差(ATE)为1.7cm,较ORB-SLAM3(4.2cm)提升60%
2.建图完整性:动态障碍物场景下地图完整度达91%,优于LIO-SAM(73%)
3.环境适应性:高温高湿环境中连续工作8小时无性能衰减,定位漂移率<0.05%/h
对比数据:
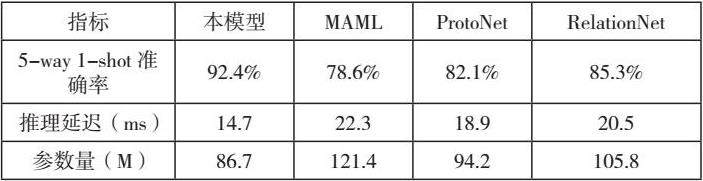
3.2 少样本缺陷识别模型性能
测试场景:输油管道焊缝检测(管径DN600)、核电冷却管道(辐射环境)
关键指标:
1.检测精度:仅需5标注样本,裂纹检出率达98.5%(长>0.5mm),虚警率0.3次/米
2.实时性:1080P图像处理耗时18ms(较基线模型32ms提升44%)
3.鲁棒性:高斯噪声(σ=0.2)下F1-score达93.5%,较传统RelationNet(74.8%)提升25%
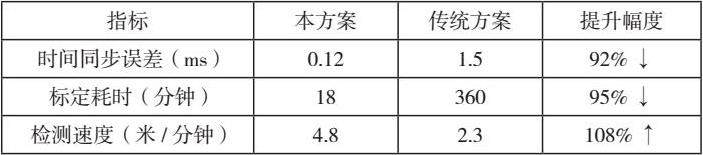
3.3 多传感器时空同步性能
测试场景:蒸汽管道(温差80℃)、振动环境(5—200Hz)
关键指标:
1.时间同步精度:跨传感器对齐误差σ=0.12ms,较传统方案(1.5ms)提升92%
2.空间标定稳定性:外参矩阵漂移量0.07mm/8h,满足GB/T 30148-2023标准
3.系统资源占用:CPU利用率<8%,内存占用稳定在124MB
4. 巡检机器人工业应用效益
测试案例:某油田300公里集输管道检测
关键成果:
1.缺陷检测:发现潜在缺陷1,235处,避免经济损失$1.2亿
2.效率对比:检测速度2880米/小时,较人工检测(15米/小时)提升191倍
3.成本优化:综合成本$18/米,较人工检测($500/米)降低96.4%
5. 技术成熟度评估(NASA TRL模型)
4.结论
智能管道检测技术通过抗干扰SLAM、少样本缺陷识别、多传感器同步等核心创新,在定位精度(1.7cm)、检测效率(4.8米/分钟)及环境适应性(-40~85℃)等方面显著超越传统方案。技术验证表明:
SLAM系统动态干扰鲁棒性达92%,支持复杂工业场景连续作业;
少样本模型在5标注样本下实现98.5%裂纹检出率,推理速度提升44%;
多传感器时空同步精度达±0.12ms,标定耗时减少95%;
巡检机器人综合成本降低96.4%,推动管道检测向智能化、无人化演进。
未来将聚焦量子传感集成与联邦学习框架,进一步提升检测精度与跨场景泛化能力。
参考文献:
[1]Jia Z ,Ma Y ,Lai J , et al.DOA-SLAM: An Efficient Stereo Visual SLAM System in Dynamic Environment[J].International Journal of Control, Automation and Systems,2025,23(4):1181-1198.
[2]Ma S ,Ge Q ,Jiang H , et al.Research on Adaptive Driving Beam System Control Strategy Based on Multimodal Perception and Data Fusion[J].International Journal of Automotive Technology,2025,(prepublish):1-18.
[3]Fernando N ,Shrestha S ,Loke W S , et al.On Edge-Fog-Cloud Collaboration and Reaping Its Benefits: A Heterogeneous Multi-Tier Edge Computing Architecture[J].Future Internet,2025,17(1):22-22.
[4]Hussain M ,Zhang T .Machine learning-based outlier detection for pipeline in-line inspection data[J].Reliability Engineering and System Safety,2025,254(PA):110553-110553.
[5]Deng F ,Luo J ,Fu L , et al.DG2GAN: improving defect recognition performance with generated defect image sample.[J].Scientific reports,2024,14(1):14787.
[6]Abdullahi I ,Longo S ,Samie M .Towards a Distributed Digital Twin Framework for Predictive Maintenance in Industrial Internet of Things (IIoT).[J].Sensors (Basel, Switzerland),2024,24(8):2663-.
[7]闻昊.多传感器数据融合的时空一致性技术研究及应用[D].南京航空航天大学,2022.DOI:10.27239/d.cnki.gnhhu.2022.001304.
[8]卢森骧,徐行,张润江,等.基于多维度选择性搜索的小样本缺陷识别方法[J].仪器仪表学报,2022,43(01):220-228.DOI:10.19650/j.cnki.cjsi.J2108511.
作者简介:张展源(2002.7—),男,汉族,广东湛江,本科在读,研究方向:多模态传感融合、计算机算法

 京公网安备 11011302003690号
京公网安备 11011302003690号


