



- 收藏
- 加入书签

基于多波束地形测量的湘江文泾滩河道形态冲淤分析
 打开文本图片集
打开文本图片集

摘要:为探究湘江文泾滩河道的形态特征及其演变规律,本研究采用多波束测深系统获取高精度水下地形数据,结合GIS空间分析与数理统计方法,对河槽形态、坡度变化、冲淤分析等进行定量解析。结果表明:(1)文泾滩河道整体呈不对称“W”型槽谷结构,主槽平均坡降为0.12‰,局部存在陡坎与深潭交替的阶梯状地形;(2)河床纵剖面显示冲刷区集中于弯道凹岸(最大侵蚀深度达8.6 m),淤积区分布于江心洲尾部(平均淤积厚度2.3 m);(3)基于地形起伏度识别出3类微地貌单元(侵蚀槽、堆积坝、过渡带),其空间分异受水流动力与泥沙输运共同控制。研究成果可为湘江航道整治与生态修复提供科学依据。
关键词:多波束测深;GIS空间分析;河道形态;冲淤分析
1 研究背景与意义
文泾滩段是湘江干线交通瓶颈之一,近年来每逢枯水季节,大量船舶经常在该航段搁浅、拥堵。统计数据显示,2016~2017年枯水期,湘江湘阴段航道已先后历经4轮枯水,最长16天,最短5天,最多时拥堵船舶700艘,单艘最长堵5天。据湘阴县地方海事介绍,枯水期文泾滩口的有效航宽仅90米左右,理论上可以双向通航,但考虑航道熟悉程度、船舶拥挤等情况,必须实行单向通航管制。单向通航管制时,在正常情况下,24小时通过能力不超过220艘。由此,文泾滩段在枯水位堵船,浅滩碍航导致航道通过能力不足是首要原因。考虑到湘江湘阴以上河段,因大范围的河床下切,枯水位已明显下降,并且难以恢复,近年来实测水文资料表明,湘江下游枯水位在持续下降,而文泾滩河床质为硬粘土夹砾石,抗冲性很强,河床不能自然冲深,在水位降落后,航深严重不足。同时该段枯水落差较大,长沙枢纽至湘阴45km河段,枯水落差约1.0m,文泾滩段落差则在0.5m以上。
文泾滩是湘江典型浅滩河段,受自然演变和人类活动(如采砂、航运)影响,河床形态复杂,亟需高精度地形数据支撑研究。单波束测深数据密度低,难以精确刻画复杂河床微地貌(如陡坎、深潭),断面测量仅能反映局部特征,无法构建连续的三维地形模型[1];遥感技术受水体浑浊度影响,水下地形反演精度有限(尤其在悬沙含量高的汛期)。多波束测深系统具有全覆盖、高分辨率(厘米级)、高效率等特点,已成为现代水下地形测绘的核心手段[2-4]。近年来,该技术被广泛应用于长江、珠江等大型河流的河床形态研究,但在湘江中游复杂滩险河段的系统性应用仍较少。文泾滩作为湘江航道整治的重点河段,其河床形态的精细刻画对以下方面具有重要意义,精准识别冲刷与淤积区域,优化疏浚工程方案。
2 研究区域与数据
2.1 文泾滩概况
文泾滩群位于湘江下游,全长约5km,滩险上距长沙市53km,下距濠河口7km,距湘阴县城19km,是长沙通往常德、津市、益阳、岳阳等省内干线航道的必经之道。本河段中洪水位时属分汊河道;右汊为通航汊道,在最低通航流量下常因进口水浅碍航。
2.2 数据来源与方法
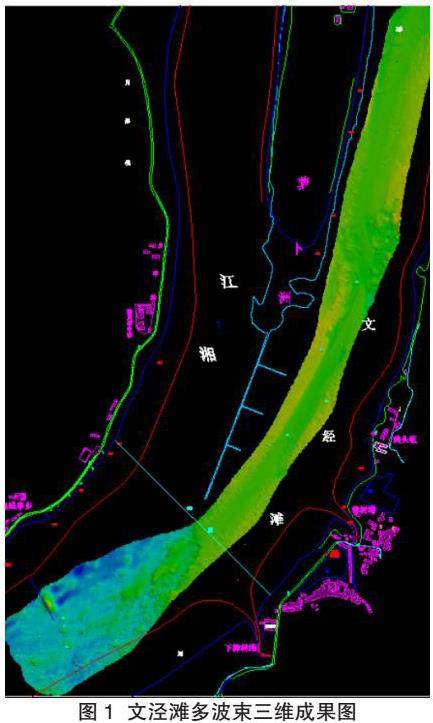
测量区域采用GPS-RTK差分技术加多波束实时动态地形测量作业方法进行。同时,采用单波束测深系统对工程数据检查。多波束测深系统固定安装在25米测量船上,通过高精度电机同步传动装置带动左右侧竖直螺杆同步旋转实现测量设备自动升降,且能达到两次升降位置控制在1mm精度以内,在水深10m的情况下,同一地点多波束边缘数据高程差控制在1cm以内,实现多波速扫测系统免校准的效果。多波束测深系统通过声波发射与接收换能器阵进行声波广角度定向发射、接收,在与航向垂直的垂面内形成条幅式高密度水深数据,能精确、快速地测出沿航线一定宽度条带内水下目标的大小、形状和高低变化,从而精确可靠地描绘出河底地形地貌的精细特征。
沿河道主槽、支汊及江心洲周边布设平行测线,间距为水深的3-4倍(约15-20 m),交叉测线用于精度验证。选择测区内的典型水域处,每日三次(早、中、晚各一次)使用声速剖面仪实时测量水体声速剖面数据,并记录成数据文件,以供内业数据处理。在测量数据采集完后,先打开要处理的项目文件,检查项目坐标系统、船型文件、校准参数等是否正确,如数据错误则需要重新输入。打开gcd格式的原始数据将所测的数据经行处理和筛选,删除异常点,得到能真实反映海底地貌的有效点云数据。然后,对点云数据进行抽稀处理,确定抽稀原则,对海量点云数据进行抽稀处理。在抽稀过程中要根据测量区域的地形实际情况确定抽稀间隔,地形平坦的抽稀间隔可适当放宽,地形变化较剧烈的,应减小抽稀间隔或不抽稀。先用软件生成格网模型,设置格网的大小,在选择数据计算方式,本项目采用求平均值的计算方法生成格网模型,输出xyz格式的处理后的点云数据。
3 研究方法
3.1 水文分析
长沙枢纽坝下至城陵矶分布有多座水文测站或水文观测点,包括长沙枢纽坝下、湘阴站、营田站、鹿角站以及城陵矶站。
①由图表可知,2016年~2024年间长沙枢纽坝下、湘阴站及营田站98%保证率水位呈逐渐下降趋势,且越往上游水位降幅越大,鹿角站、城陵矶站各年98%保证率水位略有波动,但未呈现明显下降趋势。
②长沙枢纽坝下、湘阴站及营田站2019年前下降速率较大,2019年后趋缓。
③长沙枢纽出库98%保证率的流量2016年为519 m3/s,2021年为521 m3/s,2024年为536m3/s三年基本相同,但2021及2024年湘阴、营田、鹿角和城陵矶均各站98%保证率水位较2016年均有下降;可见同流量下,坝下各站水位仍有下降。
④2019长沙枢纽出库98%保证率的流量为390 m3/s,与设计最小通航流量385 m3/s相当,长沙枢纽坝下98%保证率水位为20.55 m,低于设计最低通航水位(21.90 m)1.35m。
3.2 河床演变分析
萝卜洲处于铁角嘴至濠河口的微弯河段,把河道一分为二,左汊为副汊,右汊为通航主汊,文泾滩位于萝卜洲右汊中上段。本河段左岸地势开阔,有完整连续的防洪大堤,堤顶高程35.0m 以上;右岸是低矮的台地山丘,低洼处筑有防洪大堤,堤顶高程35.00m以上,洪水岸线比较稳固。萝卜洲长约为5.0km,平均宽度为350m,洲头高程约为20.0m,高程沿程递增,洲顶高程在30.0m 以上时,长有杂草和芦苇。本河段平面形态近似藕节状,萝卜洲洲头上游洪水河宽约1000m,中间放宽到1700m,洲尾下游又缩窄到800m。河床变化幅度-2.0~2.0m,右汊河床整体呈下切状,幅度达0~1m,尾部局部区域呈淤积状,幅度2~5m;左汊进口段整体呈淤积状,幅度达2m,是在水流作用下冲凸填凹,左汊中、下段河床整体下切,幅度2~3m,局部区域幅度达3m 以上,左汊洲尾尾段靠近心洲河床淤积,幅度达2m 以上,产生变化的原因是采砂船乱采乱抛导致的。
4 结果与分析
4.1 冲淤空间分析
使用多波束测深系统采集2021-2024年的高精度水下地形数据,对数据进行潮位校正、声速校正和网格化处理生成数字高程模型,通过DEM差分法计算冲淤厚度,结合体积法估算冲淤量[5,6]。
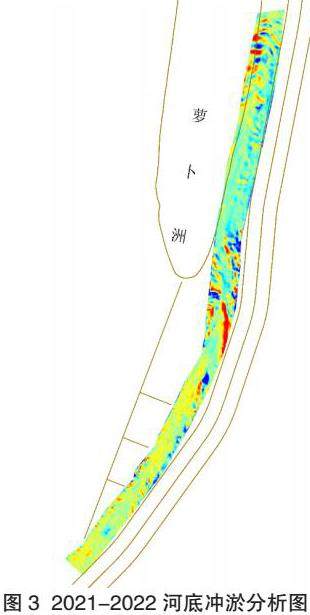
通过2021年与2022年多波束扫测数据进行比对,发现文泾滩河床总体淤积上升,淤积方量越为22000方。红色黄色部分为淤积区域,约占40%,淤积最高为1.498米,主要有两个淤积区域:萝卜洲洲头往下游1km处和洲头顺坝处,其余区域为冲刷区域,约占60%。
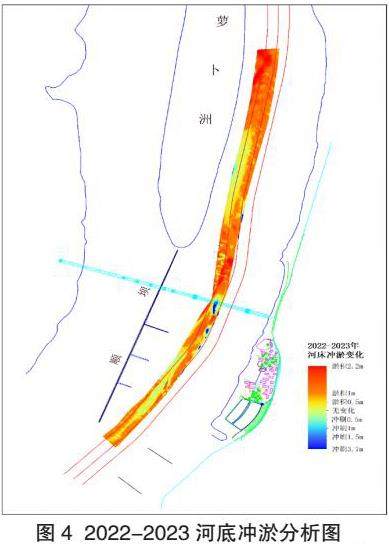
通过2022年与2023年多波束扫测数据进行比对,发现文泾滩河床总体淤积上升,淤积方量约为121000方。红色黄色部分为淤积区域,面积约占区域总面积的75%,淤积最高为2.154米,主要有两个淤积区域:萝卜洲洲头往下游1km处和萝卜洲洲头附近。冲刷区域面积约占总面积的25%,冲刷方量约为27000方。
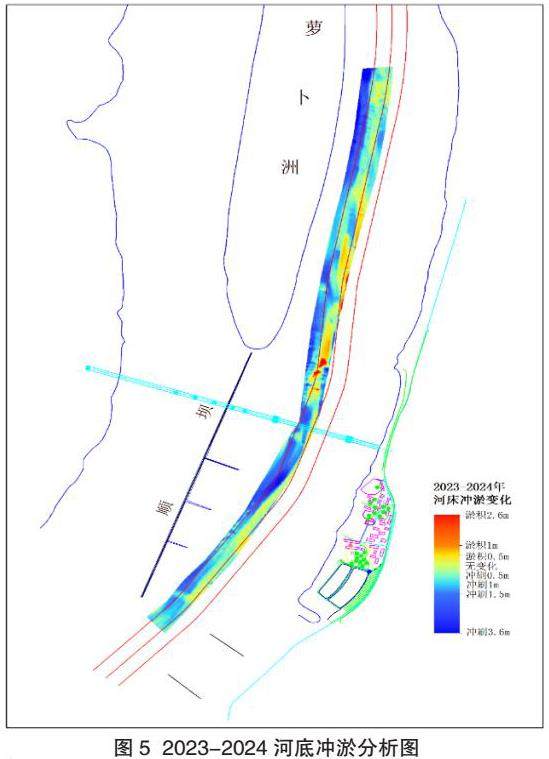
通过2023年与2024年多波束扫测数据进行比对,发现文泾滩河床总体冲刷加剧,冲刷方量约为321000方。蓝色绿色部分为冲刷区域,面积约占总面积的89%,冲刷最高为3.530米,主要有两个冲刷区域:萝卜洲洲头往下游1km处和洲头顺坝处往上游500米处。其余区域为淤积区域,面积约占总面积的11%,方量约为14000方。
4.2 结论
基于2021-2024年连续多波束测深数据,通过高精度DEM差分分析揭示了文泾滩河床的显著冲淤演变特征。结果显示:2021-2022年间河床总体淤积(+22,000m³),淤积区集中在萝卜洲洲头下游1km及顺坝处(最大淤积厚度1.50m,占40%面积);2022-2023年淤积加剧(+121,000m³),淤积范围扩展至75%区域(最大2.15m);而2023-2024年发生剧烈冲刷(-321,000m³),89%区域呈现侵蚀(最大3.53m),原淤积区转化为主要冲刷带。这种"淤积-加速淤积-强烈冲刷"的突变模式,与2023年极枯水事件引发的泥沙再悬浮和输运机制改变有关。研究结果为航道维护提供了精准的冲淤热点定位(洲头下游1km为关键演变区),后续继续关注该区域的地形反馈效应。
5 结束语
本研究基于高精度多波束测深数据,结合GIS空间分析与水文分析,系统揭示了湘江文泾滩河道的三维形态特征及冲淤分布规律。通过多波束技术量化了文泾滩地形的精细化结构。研究成果可为湘江航道疏浚工程提供靶向定位依据(如优先维护弯道深槽),做好文泾滩冲淤分析对提高湘江航道的通航能力、降低运输成本、保障重点民生物资运输畅通具有显著的经济意义。通过改善航道条件,不仅提升了航道的安全性和效率,还对降低企业运营成本、稳定产品价格、促进地区经济发展产生了积极影响。未来结合长期多期次多波束扫测数据,揭示河道形态的动态演变趋势,探索人工智能(如深度学习)在微地貌自动分类中的应用,提升大范围河道分析的效率。
参考文献:
[1]阳凡林,暴景阳,胡兴树.水下地形测量[M].武汉大学出版社:201701.339.
[2]孙和平,李倩倩,鲍李峰,等.全球海底地形精细建模进展与发展趋势[J].武汉大学学报(信息科学版),2022,47(10):1555-1567.DOI:10.13203/j.whugis20220412.
[3]赵建虎,欧阳永忠,王爱学.海底地形测量技术现状及发展趋势[J].测绘学报,2017,46(10):1786-1794.
[4]孙和平,李倩倩,鲍李峰,等.全球海底地形精细建模进展与发展趋势[J].武汉大学学报(信息科学版),2022,47(10):1555-1567.DOI:10.13203/j.whugis20220412.
[5]肖杰.智能无人船单波束测深系统在水下地形测量中的应用[J].测绘工程,2023,32(01):63-70.DOI:10.19349/j.cnki.issn1006-7949.2023.01.010.
[6]刘亮,刘时桥,李兴锐,等.多波束数据处理及潮汐影响改正[J].交通科技与经济,2021,23(02):57-62.DOI:10.19348/j.cnki.issn1008-5696.2021.02.009.

 京公网安备 11011302003690号
京公网安备 11011302003690号


