



- 收藏
- 加入书签

MOTOMAN机器人工装设计改进
 打开文本图片集
打开文本图片集



摘要:为提升分厂MOTOMAN火焰切割机器人的坡口切割效率,对该机器人的工装开展了针对性的设计优化。本项目着重从机器人工装的支撑块结构、定位销尺寸,以及机器人防护措施这三个关键方面入手进行设计改进。重新设计后的工装成效显著,不仅大幅提高了坡口切割的生产效率,同时也使坡口切割质量得到了明显提升。经验证,改进后的工装每年可节省费用约1.85万元,有效降低了生产成本。此外,该工装改进方案还成功消除了生产过程中潜在的安全隐患,为操作者和机器人在生产过程中的安全提供了有力保障,实现了生产效益与安全的双重提升。
关键词:机器人工装、支撑块、定位销、机器人防护
一、引言
为了有效满足日益增长的生产需求,进一步提升生产效能,经过多方考量和规划,我分厂新购进了一台先进的MOTOMAN火焰切割机器人,专门用于切割坡口。然而,在实际投入使用的过程中,逐渐发现新机器人所配备的工装存在一些不容忽视的问题。一是机器人工装的支撑块设计不合理,影响坡口切割效率,二是定位销设计单一,同样影响坡口切割效率,尤其是在进行批量坡口切割时,三是机器人防护方面也存在漏洞,在切割过程中产生的高温火花和金属碎屑容易飞溅到机器人关键部件上,不仅影响机器人的正常运行,还缩短了其使用寿命。这些问题严重制约了坡口切割的生产效率,使得实际产出难以达到预期目标,也在一定程度上增加了生产成本。
为了解决这些问题,保障生产的顺利进行,对机器人工装展开了全面深入的改进工作。此次改进项目主要聚焦于火焰切割机器人工装的三个关键方面:支撑块、定位销和机器人防护。经过改进后的工装投入使用后,效果显著。坡口切割的生产效率得到了大幅提升,坡口切割质量也得到了质的飞跃。同时,改进后的工装节省了大量的工时和费用,据统计,每年可节约费用约1.85万元。更为重要的是,此次改进成功解决了生产过程中存在的安全隐患,为操作者提供了一个更加安全可靠的工作环境,也间接保护了机器人在生产过程中的安全,保障了生产的连续性和稳定性,为分厂的高效生产和可持续发展奠定了坚实基础[1]。
二、项目介绍
该项目主要针对MOTOMAN-AR2010机器人(见图1)工装的支撑块、定位销和机器人防护三个方面进行了工装设计改进。
1、支撑块设计改进
在坡口切割工艺中,支撑块作为关键辅助部件,其核心功能在于为零件提供稳固的支撑,同时,避免切割火焰对工作台面横梁造成损坏。基于此,本次针对支撑块的结构及功能,从以下四个维度展开系统性设计优化[2]。
①增加支撑块高度,提高坡口切割效率,同时避免切割火焰对工作台面横梁造成损坏;
原支撑块安装到工作台面横梁后,其支撑高度仅为50mm。受限于该较低高度,作业过程暴露出两大瓶颈问题:一是在加工双面坡口零件,或外形一致但坡口方向相反的零件时,必须进行二次翻转操作才能完成反面坡口切割工序,严重影响坡口切割效率;二是在坡口切割作业中,切割火焰极易切割到工作台面横梁,进而导致横梁受损。
经重新设计优化后,将支撑块的支撑高度提升至100mm(见图2)。通过这一改进,可以在切割上述零件的坡口时,无需再进行翻转操作,即可直接进行反面坡口切割,使坡口切割效率提升约35%。同时,优化后的设计有效避免了切割火焰对工作台面横梁损伤,延长了设备的使用寿命。
②减小支撑块下端凹槽与工作台横梁间隙,使支撑块与工作台横梁配合紧凑;
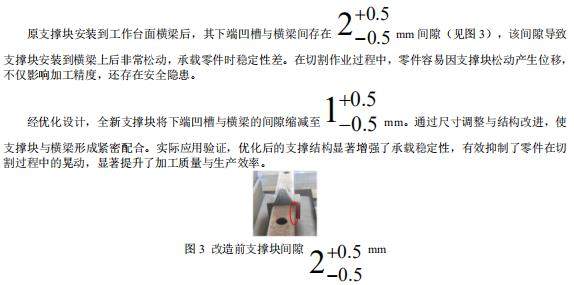
原支撑块安装到工作台面横梁后,其下端凹槽与横梁间存在mm间隙(见图3),该间隙导致支撑块安装到横梁上后非常松动,承载零件时稳定性差。在切割作业过程中,零件容易因支撑块松动产生位移,不仅影响加工精度,还存在安全隐患。
经优化设计,全新支撑块将下端凹槽与横梁的间隙缩减至mm。通过尺寸调整与结构改进,使支撑块与横梁形成紧密配合。实际应用验证,优化后的支撑结构显著增强了承载稳定性,有效抑制了零件在切割过程中的晃动,显著提升了加工质量与生产效率。
③增加支撑块下端凹槽长度,使支撑块与工作台横梁配合稳固
原支撑块安装到工作台面横梁上后,由于支撑块下端凹槽较短只有50mm与横梁配合不稳定,零件放到支撑块上后,进行切割作业时极易因支撑不稳而产生晃动,严重影响加工精度。
经优化设计,全新支撑块将下端凹槽长度增加到70mm,通过有效增加凹槽与横梁的接触长度,使支撑块安装到横梁上与横梁配合稳固,减小零件在切割过程中的晃动,为高精度切割坡口提供了可靠保障。
④增加支撑块顶端面积,使零件放到支撑块上更加稳定
原有的支撑块顶端的面积只有440cm,由于承载零件面积较小,零件放到支撑块上后不稳定。在切割过程中零件容易发生晃动,影响切割精度。
经优化设计,新型支撑块将顶端的面积增加到800cm,增加了近一半的接触面积,使得零件放到支撑块上更加稳定,有效降低了零件在切割过程中的晃动风险,确保加工过程中零件定位精准,为高质量生产提供了坚实保障。
2、定位销设计改进
定位销作为关键工装部件,其核心功能在于实现批量零件坡口切割的高效定位:在切割同类型批量零件时,仅需利用定位销完成首件零件的精准定位,并同步调试切割程序,后续同规格零件即可直接进行坡口切割,无需重复定位操作(见图4)。然而,原定位销设计高度为250mm,由于高度较高,在进行坡口切割时,无法对有定位销的定位端进行坡口切割,若需对该部位进行坡口加工,必须拆卸定位销并重新进行零件定位,此流程大幅增加了操作步骤与时间成本,严重制约生产效率。
为解决上述问题,经优化设计推出两种新型定位销,高度分别调整为180mm与130mm。该改进方案通过精准控制定位销高度,使其既能满足零件定位需求,又能避免对坡口切割工序的干扰。两种规格适配不同厚度零件坡口切割,确保零件定位端的坡口切割作业无需拆卸定位销即可完成,显著缩短加工周期,有效提升坡口切割的整体生产效率[3]。
3、增加机器人防护
在坡口切割过程中,火焰切割机器人扮演着重要角色,但新机器人防护方面仍存在漏洞。从实际作业场景(见图5)可以清晰看到,当机器人进行坡口切割操作时,火焰周围会形成极高的温度场,并且在切割过程中产生的高温火花和金属碎屑容易飞溅到机器人关键部件上。长期处于这种环境下,机器人线路的绝缘层会加速老化、变硬、变脆,进而出现开裂破损,导致线路短路或断路,严重影响机器人的稳定运行与使用寿命,增加设备故障频次与维修成本,降低整体生产效率。
为有效解决这一难题,决定在机器人线路裸露处的外围增设防护罩。防护罩安装在机器人线路周围能够像一道坚实的防线,将火焰切割产生的高热量有效阻隔在外,避免热量直接传递至线路,成功保障了机器人在坡口切割工作过程中,线路免受高温损伤,大大提升了机器人运行的稳定性和可靠性[4]。
三、创新亮点
本项目的核心创新之处在于针对MOTOMAN机器人工装的支撑块、定位销以及机器人防护这三个关键维度展开设计优化。重新设计的工装成效显著,不但大幅提升了坡口切割的生产效率与坡口质量,还节省了可观的工时与费用。更为关键的是,成功消除了生产过程中潜藏的安全隐患,为操作者与机器人在生产作业时的安全提供了间接保障。
四、效益评估
通过对MOTOMAN机器人工装的支撑块、定位销和机器人防护实施设计改进,本项目在生产效益和安全效益方面收获颇丰。经核算,改进后的机器人工装每年可节省费用约1.85万元。其中,支撑块的设计优化使得机器人在切割双面坡口或零件外形相同但坡口方向相反的零件时,坡口切割效率提升约35% ,每年能够节约费用约1.2万元。这一改进在提高坡口切割质量的同时,增强了切割过程的稳定性与安全性,对操作者起到了间接保护作用。定位销的设计改进让机器人在切割带有定位销的定位端坡口时,切割效率提高约25%,每年可节约费用约0.65万元。为机器人线路裸露处增设防护罩,有效保障了生产过程中机器人和操作者的安全,确保生产的连续性。
五、结论
综上所述,本项目聚焦于MOTOMAN机器人工装开展了设计改进,在支撑块、定位销和机器人防护的设计上实现了创新性突破。从实际应用效果来看,新设计的工装切实提高了坡口切割的生产效率,支撑块和定位销的改进分别使特定场景下的切割效率提升了约35%和25% ,有效缓解了生产压力,增强了企业的产能输出能力。
在质量层面,坡口切割质量显著提升,切割过程的稳定性增强,为产品质量提供了坚实保障。同时,在成本控制上,每年节约费用约1.85万元,降低了企业的生产成本,提高了经济效益。
不可忽视的是,在安全方面,机器人防护设计的改进以及支撑块、定位销优化带来的间接安全效益,有效消除了生产中的安全隐患,保障了操作人员和机器人的安全,确保了车间生产活动的平稳有序进行。自2023年底完成设计改进并在车间改造完成后,经实际跟踪使用,获得了车间工人的高度认可。鉴于此,该工装具备在车间全面推广应用的价值和条件,有望在更大范围内为企业带来生产、质量、成本和安全等多方面的综合效益提升,同时也为同类型机器人工装的改进优化提供了可借鉴的成功范例 ,对推动行业技术进步具有一定的参考意义。
参考文献
[1]何沁春.智能制造系统中机器人工装夹具的设计[J].现代制造技术与装备,2023(6):183-185
[2]王方凯,孙广俊.复杂精密零件数字化快速制造关键支撑技术研究[J].装备制造技术,2023(2):267-269
[3]吕利伟.可调整式“一面两销”定位装置的应用[J].制造技术与机床,2022(3):123-126
[4]胡玉东.机器人自动焊接设备安全防护装置的优化与应用分析[J].中国机械,2023(35):26-29
姓名:杨登峰 性别-男
出生年:1992.7 籍贯到市:河北省张家口市
民族: 汉
职称:助理工程师 学历:本科
研究方向:针对分厂MOTOMAN机器人工装进行设计改进

 京公网安备 11011302003690号
京公网安备 11011302003690号


