



- 收藏
- 加入书签

“智润精灵”
——基于树莓派的AI智能浇花小车设计与实现
摘要:本研究针对家庭园艺养护中浇水不及时、灌溉不精准、操作不便等痛点,设计并实现一款基于树莓派 4B 单片机的 AI 智能浇花小车系统。该系统集成土壤湿度实时监测、OpenCV 视觉识别、蓝牙无线通信与自主移动执行功能,构建 “感知 - 决策 - 执行” 三层架构,实现花卉灌溉的自动化、精准化与个性化控制。通过高精度传感器采集土壤湿度数据,结合 AI 算法动态调整灌溉策略,搭配视觉识别技术完成多盆栽定向浇灌与自动归位,支持用户自定义湿度阈值适配不同植物生长需求。经测试,系统土壤湿度监测误差 ?±2% ,灌溉触发准确率达 98% 以上,视觉定位偏差 ?1cm ,且成本控制在市场同类产品的 70% 左右,具备高性价比与强实用性。该系统有效解决了无人值守场景下的植物养护难题,降低了园艺养护门槛,为智慧家居场景提供了轻量化、低成本的智能园艺解决方案,具有广阔的民用推广前景。
关键词:树莓派 4B ;智能灌溉;OpenCV 视觉识别;蓝牙通信;智能家居
1 引言
1.1 研究背景及意义
随着我国城市化进程加速与居民生活水平提升,“微园艺”“阳台经济” 成为都市人群品质生活的重要组成部分。《2023 年中国家居园艺行业发展报告》显示,我国家庭园艺市场规模已突破 500 亿元,年增长率超 15%。但家庭园艺养护仍面临诸多困境:现代人群生活节奏快,出差加班频繁导致植物浇水不及时;行动不便群体在基础养护操作中存在诸多不便。
传统人工浇灌依赖主观经验,耗时费力且易造成水资源浪费,而市场现有自动浇花设备存在明显缺陷:固定定时灌溉模式缺乏动态湿度感知,易引发 “过浇” 或 “欠浇”;部分设备仅支持单一盆栽养护,无法满足多植物家庭需求;高端产品功能完善但价格昂贵,难以普及。在此背景下,研发低成本、高精准、易操作的智能浇花系统具有重要现实意义与应用价值。
本项目设计的 AI 智能浇花小车,通过物联网技术与人工智能算法深度融合,实现土壤湿度实时监测、按需精准灌溉、多盆栽自动养护与远程控制,既解决无人值守场景下的植物养护难题,又通过精准灌溉减少水资源消耗,契合绿色低碳理念。同时,模块化设计架构便于功能扩展,可融入智慧家居生态,推动物联网技术在民用领域的深度渗透。
1.2 国内外研究现状
1.2.1 国际研究现状
全球自动灌溉技术呈现农业规模化应用与家庭精细化探索并行的格局。欧美国家凭借技术先发优势,推出多款代表性产品:美国某品牌智能浇花控制器支持手机 APP 远程设定与天气联动,但缺乏土壤湿度动态感知,灌溉精准度不足;德国某便携式智能浇花器集成土壤湿度传感器与水泵,可实现湿度触发灌溉,但仅支持单一盆栽养护,无自主移动功能。
国际高端家用智能浇花设备在远程控制、环境联动方面表现突出,但存在明显短板:视觉识别定位技术应用不足,难以实现多盆栽定向浇灌;产品定价较高,单台售价多在 300 美元以上,限制市场普及;灌溉策略固定,缺乏对不同植物生长特性的适配能力,个性化服务水平有待提升。
1.2.2 国内研究现状
我国智能浇花设备研究起步较晚但发展迅猛,核心技术以 51 单片机、STM32 芯片为控制核心,搭配土壤湿度传感器实现基础湿度触发灌溉。俞纪良等(2022)基于 51 单片机设计的自动浇花系统,通过电位器调节湿度阈值,实现干旱自动抽水灌溉,但系统响应慢,传感器测量误差约 ±5%;乔琳君等(2021)基于 STM32 芯片开发的智能浇花器,增加蓝牙远程控制功能,可查看土壤湿度数据,但缺乏自主移动与视觉定位模块,仅能养护固定位置盆栽。
当前国内产品虽在成本控制上有一定优势,但与国际先进水平存在差距:精准化程度不足,传感器响应精度低,灌溉阈值多为固定值;智能化水平有限,缺乏多盆栽定位与自主移动能力;系统兼容性与扩展性差,难以融入智慧家居生态。随着我国物联网与人工智能产业快速发展,低成本高精度传感器、视觉识别算法等关键技术不断突破,为智能浇花设备升级迭代提供了有力支撑。
1.3 主要研究内容
本研究以 “精准、智能、便捷、低成本” 为核心目标,围绕四大环节展开研究:
系统需求分析与指标确定:明确功能需求包括土壤湿度实时监测、智能自动灌溉、多盆栽定向浇灌、阈值自定义调整、蓝牙远程控制等;性能指标涵盖土壤湿度监测误差≤±3%、视觉定位偏差≤2cm、系统响应时间≤10s、连续运行稳定性≥72 小时等。
硬件系统设计与搭建:以树莓派 4B 为控制核心,完成硬件选型与电路设计,搭建由土壤湿度传感器、OpenCV 视觉识别模块、蓝牙传输模块、水泵驱动电路与移动小车机构组成的硬件系统。
软件系统开发与优化:基于 Python 语言开发控制软件,包括五大模块,优化土壤湿度数据滤波算法与 OpenCV 视觉识别算法,设计简洁直观的用户交互界面。
系统集成调试与应用效果验证:完成软硬件集成联调,开展多维度性能测试;选取常见家庭花卉进行实际应用测试,邀请不同人群参与用户体验测试,优化系统设计。
2 系统设计与实施
2.1 设计思路
本系统采用 “感知 - 决策 - 执行” 三层架构设计,通过模块化解耦实现功能协同,保证系统灵活性与可维护性,降低开发调试难度。
感知层:作为数据采集终端,由土壤湿度传感器、OpenCV 视觉识别模块与环境辅助传感器组成。土壤湿度传感器实时采集数据并无线传输至控制核心;视觉识别模块通过摄像头采集环境图像,完成花卉定位与距离检测;辅助传感器可采集光照强度、空气湿度等补充数据。
决策层:以树莓派 4B 为核心控制单元,接收感知层数据后,与预设湿度阈值对比,结合植物类型确定灌溉需求与时长;根据视觉识别模块输出的位置信息,规划最优浇灌路径。
执行层:由水泵驱动电路与移动小车机构组成,接收决策层指令完成灌溉操作。移动小车按路径规划移动至目标盆栽位置,水泵驱动电路启动水泵并调节转速实现精准浇水,灌溉完成后小车自动返回停靠点。
2.2 核心技术
2.2.1 控制核心技术
选用树莓派 4B 单片机作为主控单元,其搭载四核 Cortex-A72 CPU,主频 1.5GHz,具备快速并行处理多模块数据请求的能力,可同时响应多项任务。该主控单元支持多种操作系统,兼容 SPI、I2C、UART 等外设接口,便于设备连接集成;支持 Python、C++ 等编程语言,开源社区资源丰富,可缩短开发周期;40 个 GPIO 接口满足多设备接入需求,为功能扩展预留空间。
2.2.2 感知与传输技术
土壤湿度传感器选用高精度电容式传感器,采用频域反射原理,测量范围 0-100% RH,误差≤±2%,配备 JDY-40 2.4G 无线传输模块,传输距离达 10 米,支持休眠唤醒模式降低能耗。
OpenCV 视觉识别技术为多盆栽定向浇灌核心,系统采用 500 万像素高清摄像头采集图像,通过 OpenCV 库进行灰度化、降噪处理,利用图像分割算法提取花卉区域特征,经模板匹配实现定位,基于距离测算算法确保灌溉精准性。优化后定位响应时间≤1 秒,定位偏差≤1cm。
2.2.3 驱动与控制技术
水泵驱动电路采用 8550 型 NPN 三极管与继电器构建开关控制电路,实现弱电控制强电,有效隔离控制电路与动力电路,避免电磁干扰。
移动小车机构采用轮式驱动设计,配备两个直流减速电机与一个万向轮,电机驱动模块选用 L298N 双 H 桥电机驱动板,支持正反转与转速调节,与树莓派 4B GPIO 接口连接。小车运动控制算法结合视觉定位数据与路径规划逻辑,实现自动寻的、定向移动与自动归位功能,运动速度可调范围 0.1-0.5m/s。
2.3 软硬件设计
2.3.1 硬件设计
系统硬件由控制核心、感知、通信、驱动与执行五大模块组成,通过标准化接口连接。构成完整的硬件系统(图 2-2)。
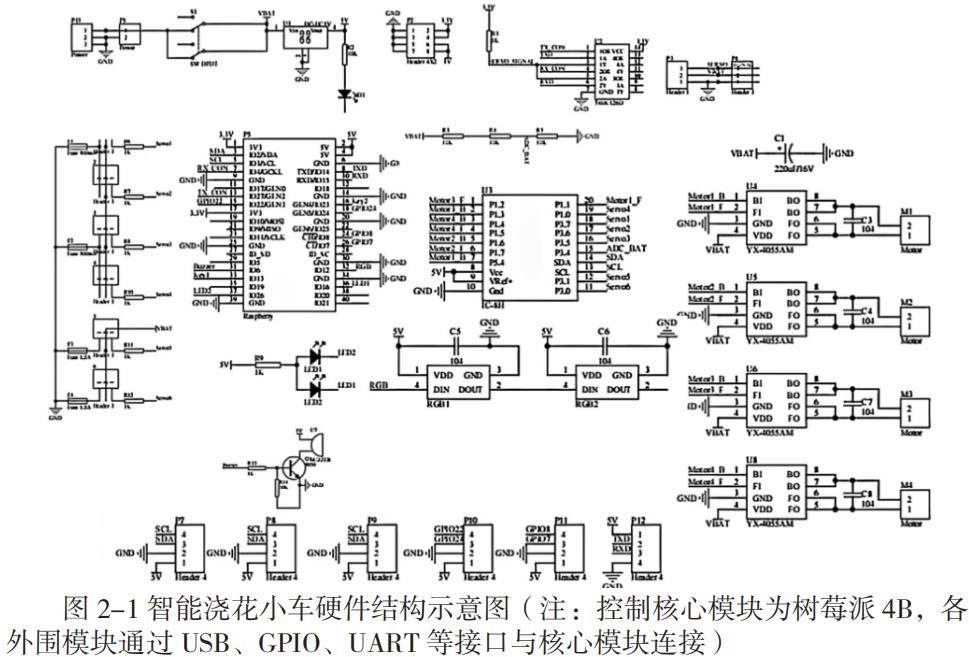
控制核心模块:以树莓派 4B 为核心,配备 16GB microSD 卡存储程序与数据,安装 Raspbian 操作系统,通过 USB 接口连接 5V/3A 电源适配器供电,配备备用锂电池,断电后可维持核心功能运行 2 小时。
感知模块:土壤湿度传感器采用探针式设计,直接插入土壤采集数据;高清摄像头通过 USB 接口与树莓派 4B 连接,采集角度可调;辅助传感器通过 I2C 接口与主控单元连接。
通信模块:选用蓝牙 5.0 模块,通过 UART 接口与树莓派 4B 连接,支持 AT 指令配置,集成天线增强信号传输稳定性。
2.3.2 软件设计
系统软件基于 Python 语言开发,采用模块化设计思想,分为五大模块,通过函数调用实现数据交互与功能协同。软件工作流程如图 2-2 所示。
数据采集模块:采用多线程编程,同时接收多个传感器数据,通过滑动平均滤波算法处理原始数据,消除随机干扰,处理后的数据存储于本地数据库并同步至用户移动设备。
决策控制模块:内置多种植物标准湿度阈值参数库,用户可自定义修改;当土壤湿度低于预设阈值时,结合植物类型、光照强度等数据计算最优灌溉方案,根据视觉识别结果规划移动路径。
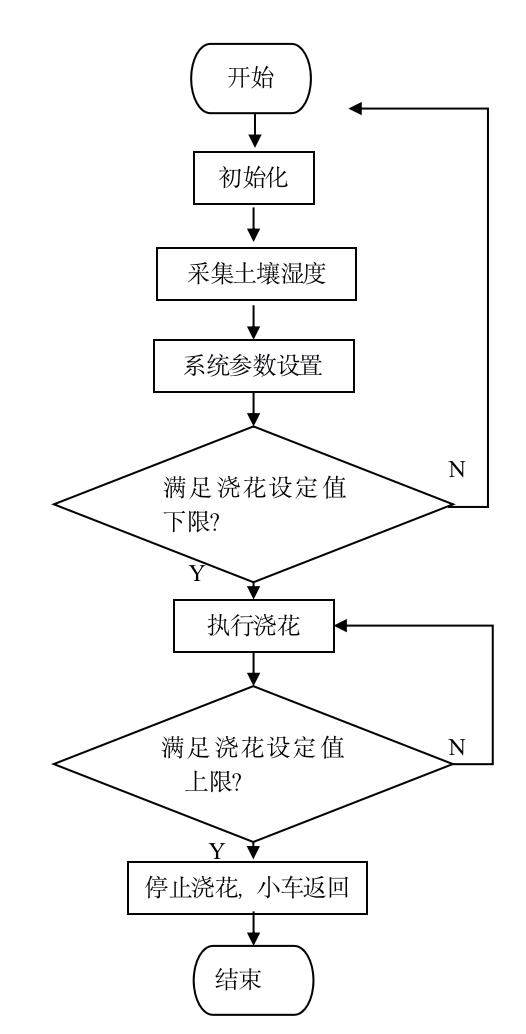
图 2-3 智能浇花小车软件工作流程图(注:系统上电后自动初始化,通过循环监测土壤湿度与执行逻辑,实现自动化灌溉)
3 系统测试与应用效果
3.1 系统测试
搭建模拟家庭园艺场景测试环境,选取月季、绿萝、多肉三种常见花卉作为测试对象,开展多维度测试,结果如下表所示:
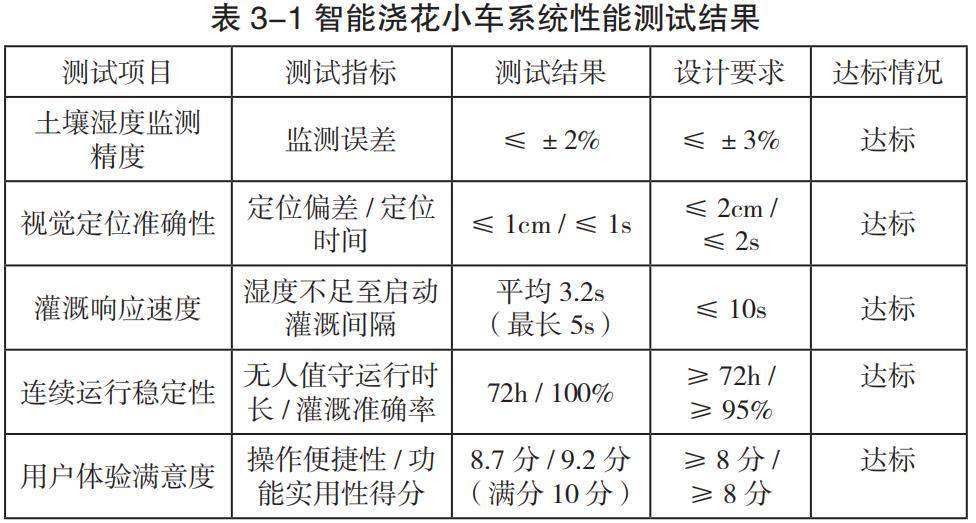
由表 3-1 可知,系统各项性能指标均满足设计要求:土壤湿度监测误差≤±2%,能够准确反映土壤实际含水量;视觉定位偏差≤1cm,定位响应迅速,可实现多盆栽精准定位;灌溉响应时间平均仅 3.2s,能及时满足植物需水需求;连续 72 小时无人值守运行期间,灌溉准确率达 100%,未出现误触发或漏触发现象;用户体验测试中,操作便捷性与功能实用性得分均高于 8.5 分,整体满意度较高。
3.2 应用效果
3.2.1 实际应用价值
本系统实用价值显著:为上班族与商务人士解决出差期间植物无人照料难题;为行动不便群体避免弯腰浇水等体力劳动;为园艺爱好者提供精准灌溉与数据监测功能,提升种植成功率。同时,精准灌溉功能有效减少水资源浪费,平均每盆植物每月可节水 3-5 升,契合绿色低碳理念。
3.2.2 成本优势
系统严格控制硬件成本,核心硬件包括树莓派 4B(约 300 元)、土壤湿度传感器(约 50 元)、摄像头(约 80 元)、蓝牙模块(约 30 元)、小车底盘与电机(约 150 元)、水泵与驱动电路(约 40 元),硬件总成本约 650 元,产品定价可控制在 800 元以内,仅为国际同类产品价格的 30%-50%,市场竞争力较强。
4 系统优化与前景展望
4.1 系统优化方向
算法优化:当前视觉识别算法在复杂光照条件下定位准确率略有下降,未来可引入深度学习算法,通过大量图像样本训练优化模型;同时融合多维度数据,优化灌溉决策算法,实现动态智能调整。
功能扩展:增加手机 APP 远程视频监控功能,实时查看植物生长状态;增设施肥提醒功能,根据植物生长周期与土壤养分数据发出提醒;开发多设备联动功能,融入智慧家居生态。
硬件升级:优化小车底盘结构设计,采用更轻便耐磨材质;升级传感器模块,选用精度更高、功耗更低的产品;增加太阳能供电模块,利用阳台光照充电,降低能耗。
4.2 前景展望
随着智慧家居产业发展与居民消费升级,家庭智能园艺设备市场需求将持续增长。本系统凭借精准化、智能化、低成本优势,在家庭园艺、小型阳台农场、办公绿植养护等场景中应用前景广阔。
民用市场推广方面,可针对不同用户群体推出定制化产品:面向普通家庭的基础版,具备核心自动灌溉与远程控制功能;面向园艺爱好者的专业版,增加多参数监测、自定义灌溉策略等高级功能;面向老年人的简化版,优化操作界面,增加语音控制功能。
技术推广与产业化方面,可与智能家居企业、园艺设备厂商合作,实现技术成果转化;申请相关专利构建技术壁垒,提升市场竞争力。未来,随着技术优化与成本降低,该系统有望成为智慧家居标配产品,推动智能园艺产业规模化发展。
参考文献:
[1] 俞纪良,刘壮林,范海平。基于单片机的自动浇花系统设计 [J]. 电子设计工程,2022,30 (12):112-116.
[2] 乔琳君,魏严锋。基于 STC89C52 单片机的自动浇花系统设计 [J]. 微型电脑应用,2021,37 (8):154-156.
[3] 徐梓瑞,徐晓,彭晓旭。基于单片机的自动浇花器设计 [J]. 中国新技术新产品,2022 (10):45-47.
[4] 郭润坤。基于单片机的自动浇花器设计 [J]. 南方农机,2022,53 (9):138-140.
课题项目:
集宁师范学院大学生创新创业训练计划项目 “智润精灵” AI 智能浇花小车(X2024114270053)。
作者简介:
马振寰(1981-),女,内蒙古呼伦贝尔人,硕士,副教授,研究方向:电子与通信;
李 楠(2004-),女,汉族,内蒙古乌兰察布人,本科在读,研究方向:电子信息;
文佳乐(2004-),女,满族,内蒙古巴林左旗人,本科在读,研究方向:物理学;
张雅宁(2005-),女,汉族,内蒙古化德县人,本科在读,研究方向:物理学;
王 鑫(2005-),男,汉族,内蒙古商都县人,本科在读,研究方向:电子信息。

 京公网安备 11011302003690号
京公网安备 11011302003690号


